Chair of Control Engineering
The tasks of the Chair of Control Engineering include the teaching of theory and practical application of control engineering as well as modeling and simulation for students of electrical engineering, information technology/technical computer science, industrial engineering, aquaculture and the master's program in computational engineering.
Contact
Prof. Dr.-Ing. Torsten Jeinsch
Richard-Wagner-Str. 31, House 8, Room 8132
D-18119 Rostock-Warnemünde
Tel: + 49 (0)381 498-7701 Fax: + 49 (0)381 498-7702
Email: torsten.jeinsch@uni-rostock.de
Dates
News
10th Hydrodynamic Symposium
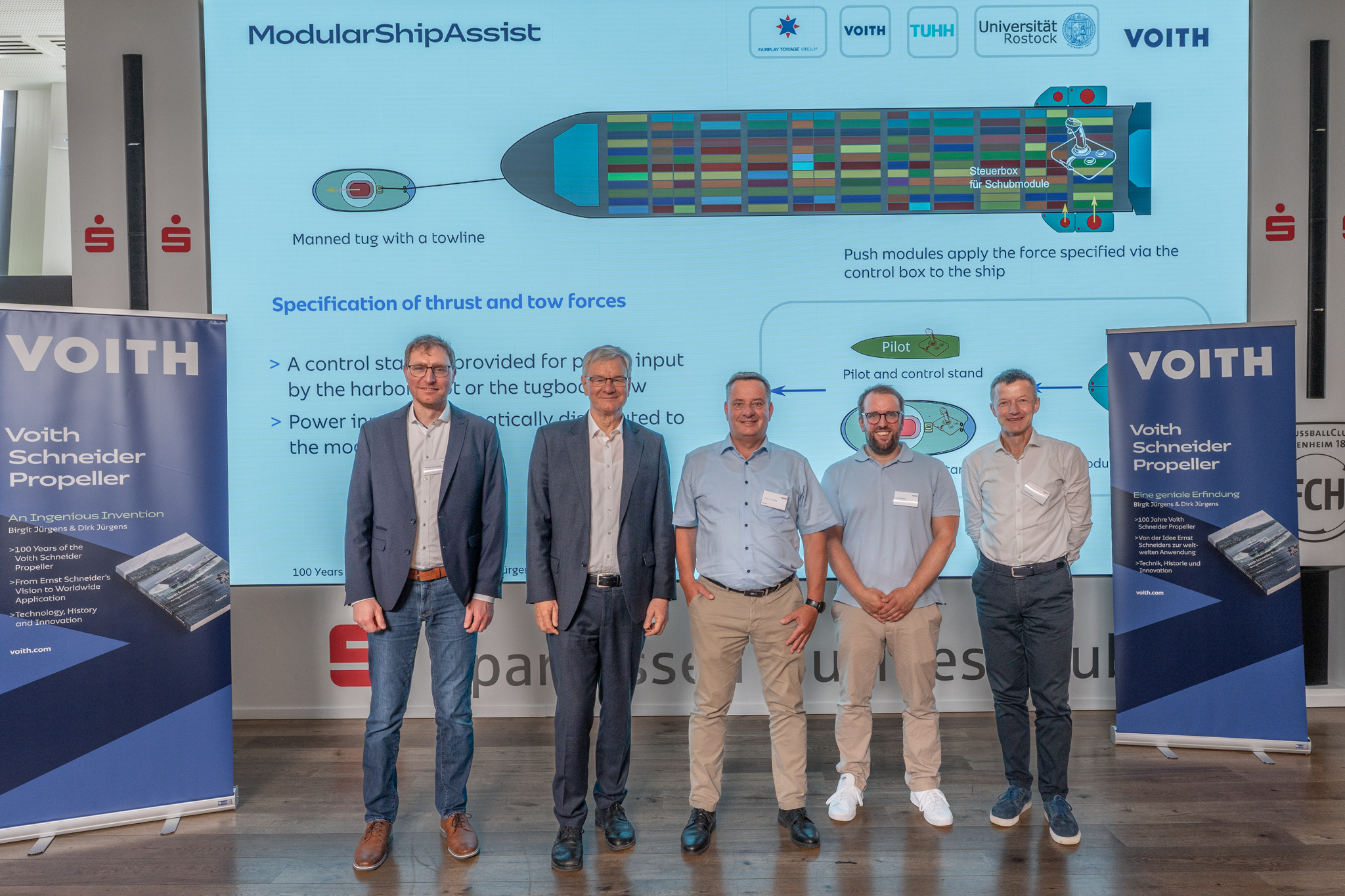
Three inspiring days at the 10th Hydrodynamic Symposium in Heidenheim an der Brenz. The event was dedicated entirely to the 100th anniversary of the Voith Schneider propeller—a century of maritime innovation in the field of ship propulsion.
On the sidelines of the symposium, there was also an opportunity for a project meeting among the partners of the ModularShipAssist2 collaborative project. Represented were the Fairplay tugboat shipping company Richard Borchard GmbH, J.M. Voith SE & Co. KG | VTA, the Technical University of Hamburg, and the University of Rostock.
The symposium provided an excellent platform for professional exchange with experts from industry, research institutions, and universities. The focus was on current developments in the fields of hydrodynamics, maritime propulsion systems, shipbuilding, and computational fluid dynamics (CFD).
In addition to the high-caliber technical presentations, the discussions on real-world industrial challenges, new research approaches, and future development prospects were of particular importance. They underscored once again how crucial collaboration between academia and industry is for technical innovations in the maritime sector.
Successful Participation in the Expert Forum and Conference on Autonomous Shipping in Rostock
An exciting and eventful week is behind us.
As part of the Expert Forum on Autonomous Shipping and the conference “New Technologies and Test Beds for Waterways and Ports,” organized by the Federal Ministry of Transport (BMV) and the Federal Maritime and Hydrographic Agency (BSH), we were on the water in Rostock with our own test vessels.
In an initiative unlike any seen before, research institutions and companies from all over Germany came together to research and develop innovative solutions for autonomous shipping. Various technologies were demonstrated and tested under real-world operating conditions on the Warnow River. These included automatic environmental sensing using sensor systems, automated maneuvers and evasive maneuvers, remote control concepts, and automated docking and undocking procedures.
And the Chair of Control Engineering? Right in the thick of it, not just on the sidelines.
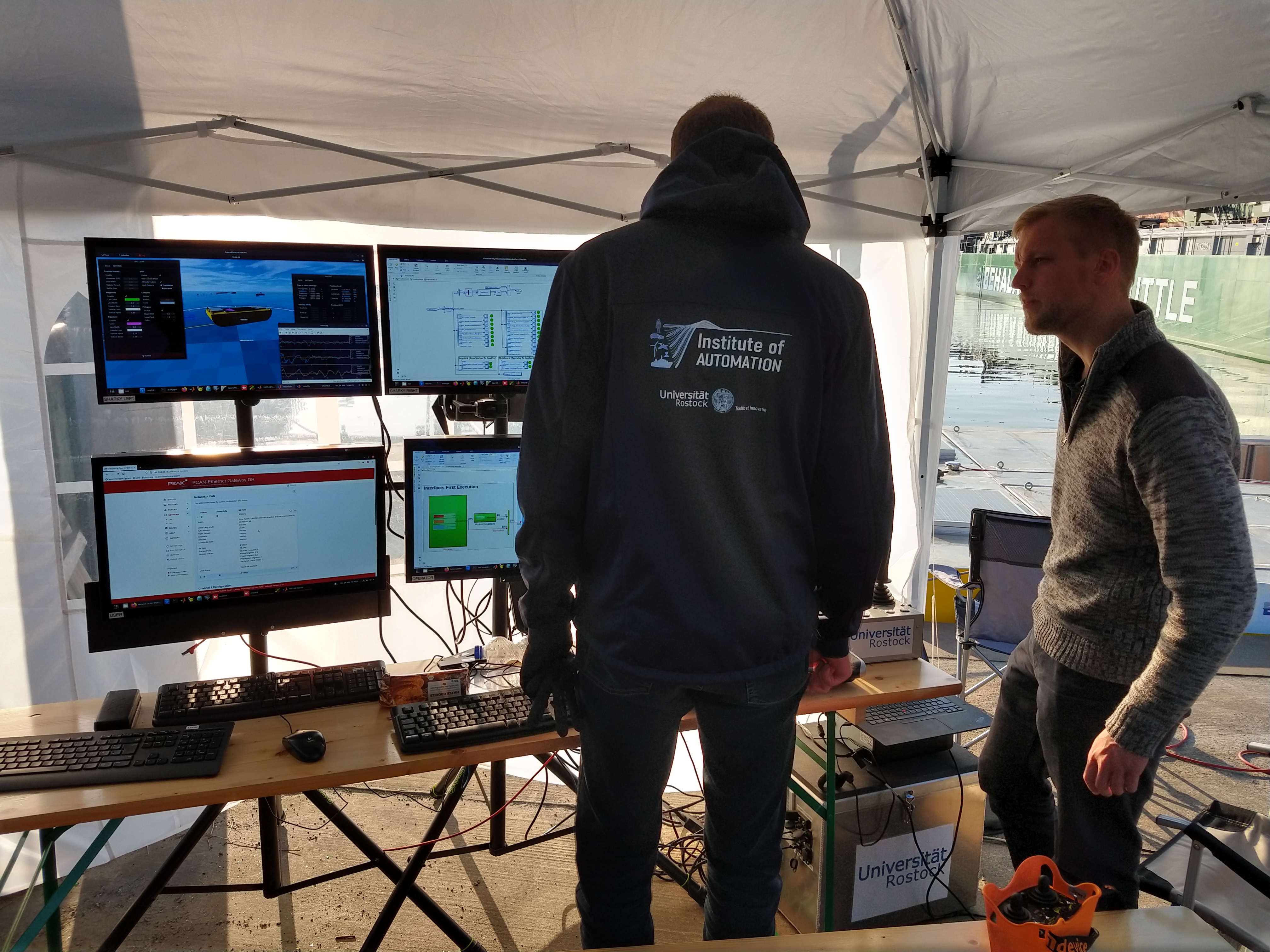
We had the opportunity to present our research and development projects—ModularShipAssist, DigitalSOW, GALILEOnautic, and WarnowstromerAI—through technical presentations, pitches, and live demonstrations. The event also provided an opportunity to discuss the results achieved with approximately 200 experts from business, academia, government, and politics, and to gain valuable insights for the further development of autonomous maritime systems.
We would like to thank everyone involved for the professional exchange and the successful event.

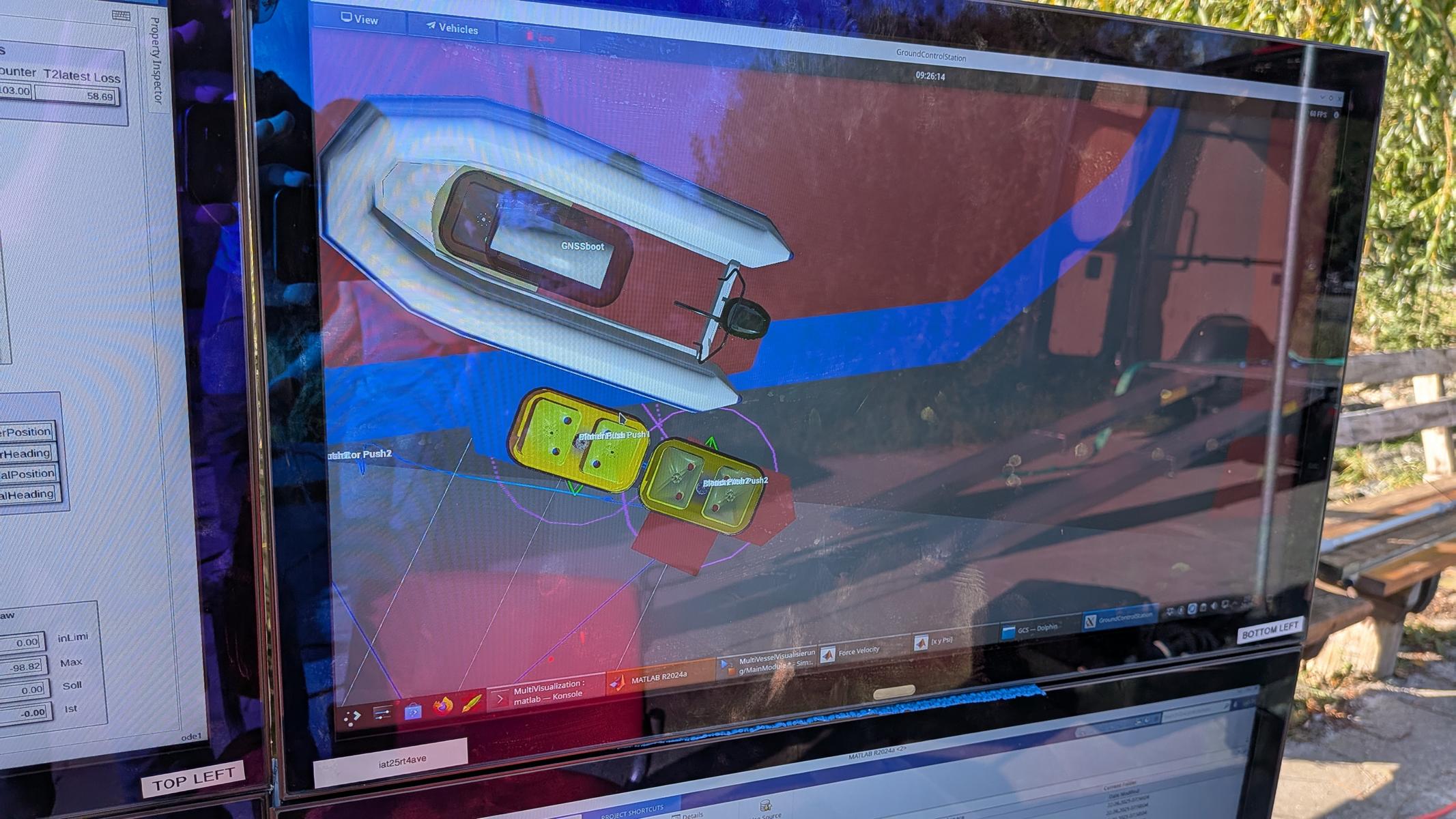
Field tests as part of the A-SWARM 2 joint project
From April 27 to 30, 2025, we conducted an extensive system test at the Westhafen in BEHALA, Berlin, as part of the A-SWARM 2 project, thereby reaching another important milestone.
The focus was on key integration and testing activities:
- Commissioning of the demonstrators
- Propulsion tests and integration of new GNSS receivers
- Precise measurement and calibration of the sensor systems (INS, LiDAR)
- Setup and validation of the network connection between demonstrators and the control station
- Successful automated operation (including dynamic positioning and speed control)
A particular highlight was the seamless interaction of all systems during automated operation, another significant step toward robust, networked maritime autonomy.
Many thanks to all project partners Berliner Hafen- und Lagerhausgesellschaft mbH (BEHALA), DHL Group (DHL), Schiffbau-Versuchsanstalt Potsdam GmbH (SVA), VEINLAND GmbH, and the Technical University of Berlin (TUB-EBMS) for their collaboration and valuable on-site exchange!
The project is funded by the Federal Ministry for Economic Affairs and Energy and supported by the Project Management Agency Jülich (PTJ) (FKZ 03SX593F).


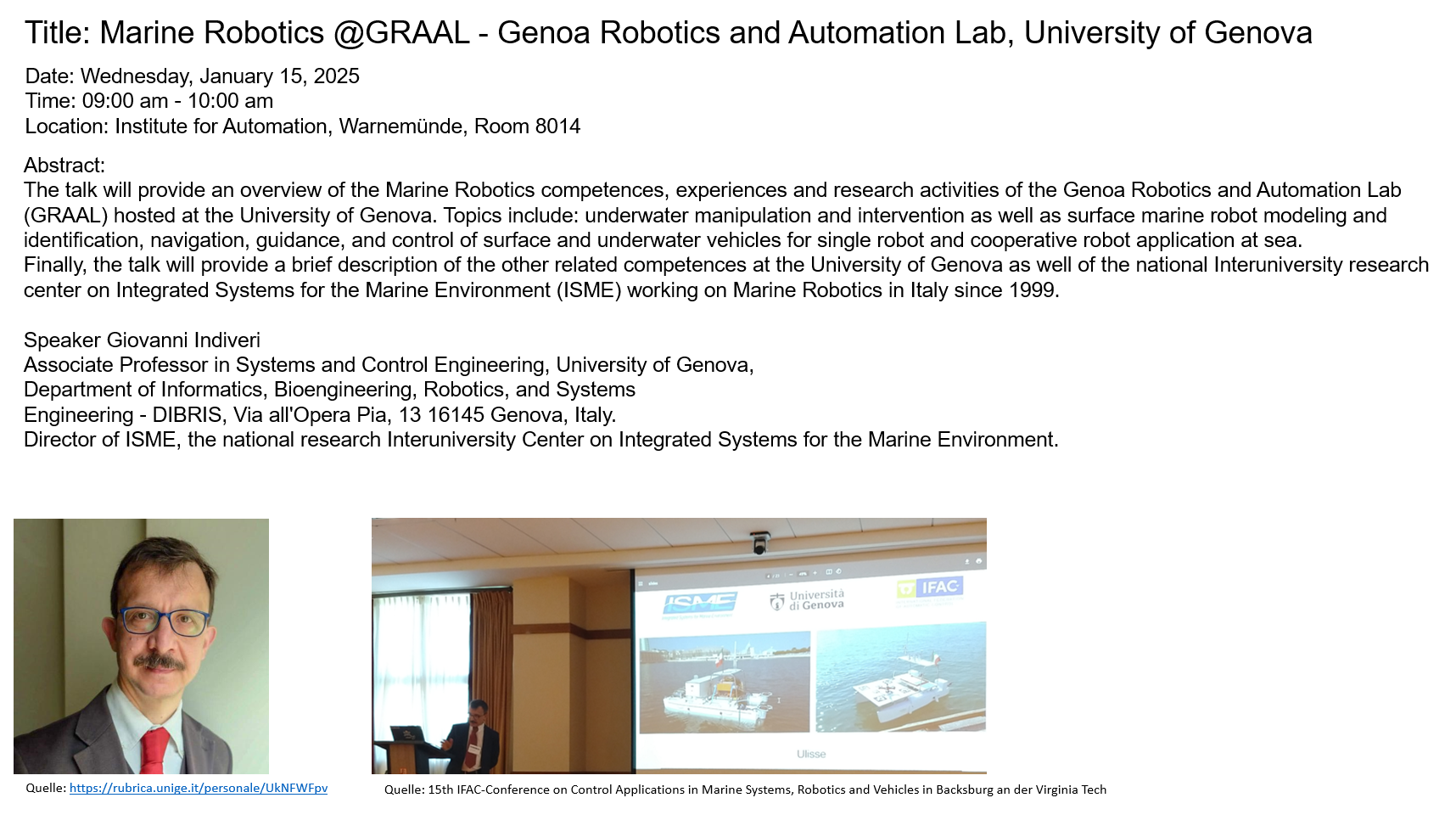
International Research on Autonomous Watercraft at the Institute for Automation Technology
On Wednesday, May 13, 2026, Luca Tarasi from the University of Genoa (Italy), Department of Control Engineering, presented his latest research findings on the topic of “Situational Awareness for Autonomous Surface Vehicles.”
Luca Tarasi has been a doctoral candidate at the Genoa Robotics and Automation Laboratory at the University of Genoa since March 2024. He is supervised by Prof. Enrico Simetti and Prof. Nicoletta Noceti.
As part of a six-month research fellowship at the Institute of Automation Technology, he is working on methods for environmental sensing, obstacle detection, and obstacle tracking for autonomous watercraft. To this end, he is investigating the combined use of cameras and LiDAR sensors. He recently presented an interim report on his work to the institute’s staff.
Rostock is ready for autonomous ships—at least on a model scale

Rostock, April 23, 2026
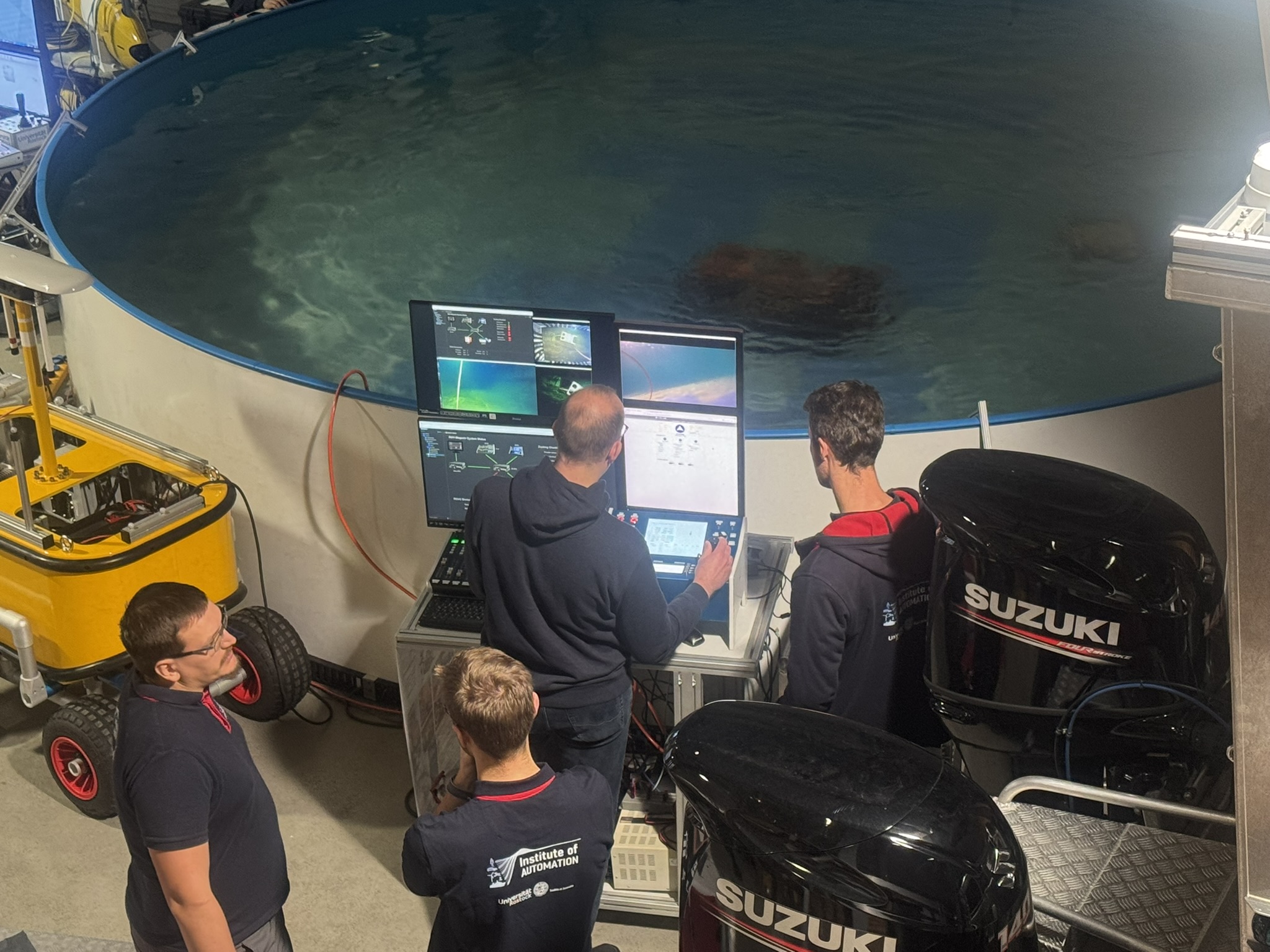
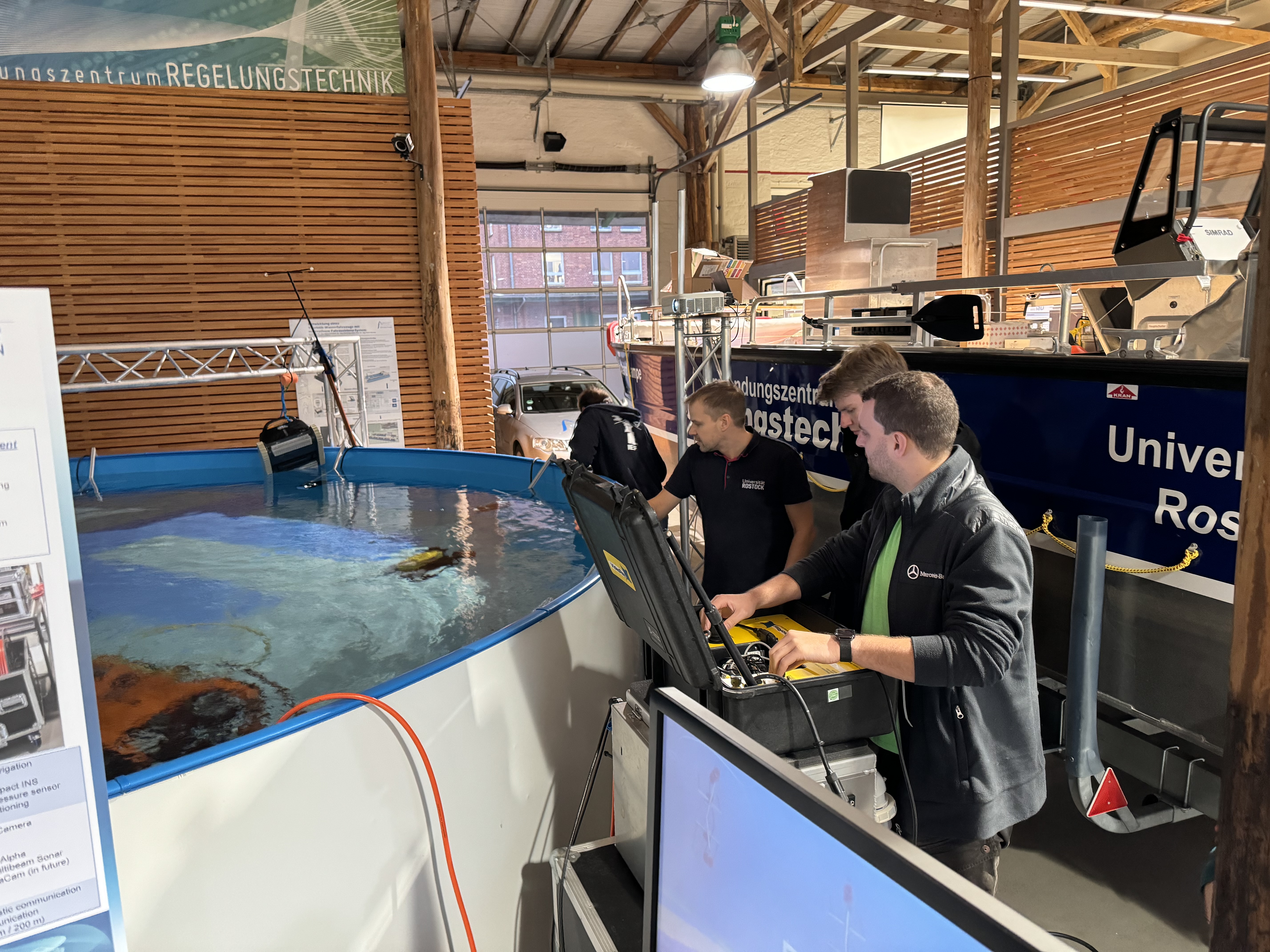
With the successful final testing of the ModularShipAssist collaborative project, an important step toward automated and cooperative ship assistance in the port was demonstrated today at the University of Rostock’s water sports facility.
Rostock is now well prepared to receive remotely controlled and autonomous vessels—albeit initially on a model scale.
As part of the “Innovative Port Technologies” funding call, the project partners jointly developed a modular assistance system that will enable safe, efficient, and low-emission support for ship maneuvers in the port.
Participants included J.M. Voith SE & Co. KG, the Technical University of Hamburg (Institute for Fluid Dynamics and Ship Theory), and the University of Rostock (Institute of Automation Technology). The project was supported by the associated partners Hamburg Port Authority, the Hamburg Harbor Pilots’ Association, and Fairplay Schleppdampfschiffs-Reederei Richard Borchard GmbH.
Autonomous Assistance – Modular, Cooperative, and Electric
At the heart of the project is an autonomous, modular assistance system consisting of several electrically powered pushing and towing modules, as well as a mobile command center. These modules can be flexibly combined to provide coordinated, efficient, and—in the future—autonomous support for large ships during complex port maneuvers.
Control is based on the requirements of pilots or captains and is designed for intuitive operation. In parallel, extensive simulation methods have been developed to model and optimize the behavior of the systems in a realistic manner.
Successful Demonstration on the Warnow
As part of the closing event, the developed systems were tested under realistic conditions on a model scale in open water. The demonstration showcased the interaction between the assistance modules as well as the possibilities for cooperative, automated maneuvers.
In parallel, the key project results were presented in a series of concise lectures and discussed with representatives from research, industry, and port operations.
A Glimpse into the Future
Even though the demonstration was conducted on a model scale, the underlying vision is clear: ports where autonomous and remotely controlled ships can maneuver safely, efficiently, and with low emissions.
In other words: Rostock is ready for autonomous ships—the big ones can come now.
A contribution to the transformation of port logistics
The project addresses key challenges in modern port logistics: rising traffic volumes, larger ships, and the need for sustainable, low-emission solutions.
By automating ship assistance, one of the last interfaces in the maritime transport chain—which has traditionally been highly manual—is being further developed.
The insights gained from the project provide important impetus for future developments toward autonomous shipping and smart port infrastructure.
Acknowledgments and Funding
Special thanks go to the University of Rostock’s water sports facility, as well as to the Director of University Sports, Dr. Juliane Lanz, and the boat keeper, Ulf-Peter Schlötels, for their support during the final on-site testing.
The project was funded by the Federal Ministry of Transport (BMV) and managed by the project sponsor TÜV Rheinland Consulting (FKZ 19H22009C).
Credits:
University of Rostock, Project ModularShipAssist – Autonomous and cooperative modules for commanded ship assistance in port operations (https://www.rt.uni-rostock.de) funded by Federal Ministry of Transport and supported by TÜV Rheinland Forschungs- und Innovationsmanagement (IHATEC II, FKZ 19H22009C)
Soundtrack (omega alarm, hunted, chase) by Ronald Kah (https://ronaldkah.de) is licensed under CC BY 4.0 (https://creativecommons.org/licenses/by/4.0/)




Ph.D. Defense by Dr.-Ing. David Jammer

On April 23, 2026, Dr.-Ing. David Jammer successfully defended his dissertation on the topic “Acceleration of Discrete-Event-Based Simulation Studies Using the DEVS Formalism on HPC Systems” at the Faculty of Computer Science and Electrical Engineering at the University of Rostock.
The members of the doctoral committee were: Prof. Adrian (Chair) – University of Rostock, Prof. Jeinsch – University of Rostock, Prof. S. Pawletta – Wismar University of Applied Sciences, Prof. Breitenecker – Vienna University of Technology, Prof. Thurow – University of Rostock, Prof. Uhrmacher – University of Rostock, Prof. Schmidt – University of Rostock.
Congratulations!
Photo: from left to right: Prof. Olaf Hagendorf, Dr. David Jammer, Prof. Peter Junglas, Prof. Torsten Jeinsch, Prof. Thorsten Pawletta, Prof. Sven Pawletta. Photographer: Alexander Schöley
Orientation trips on the TS Archimedes
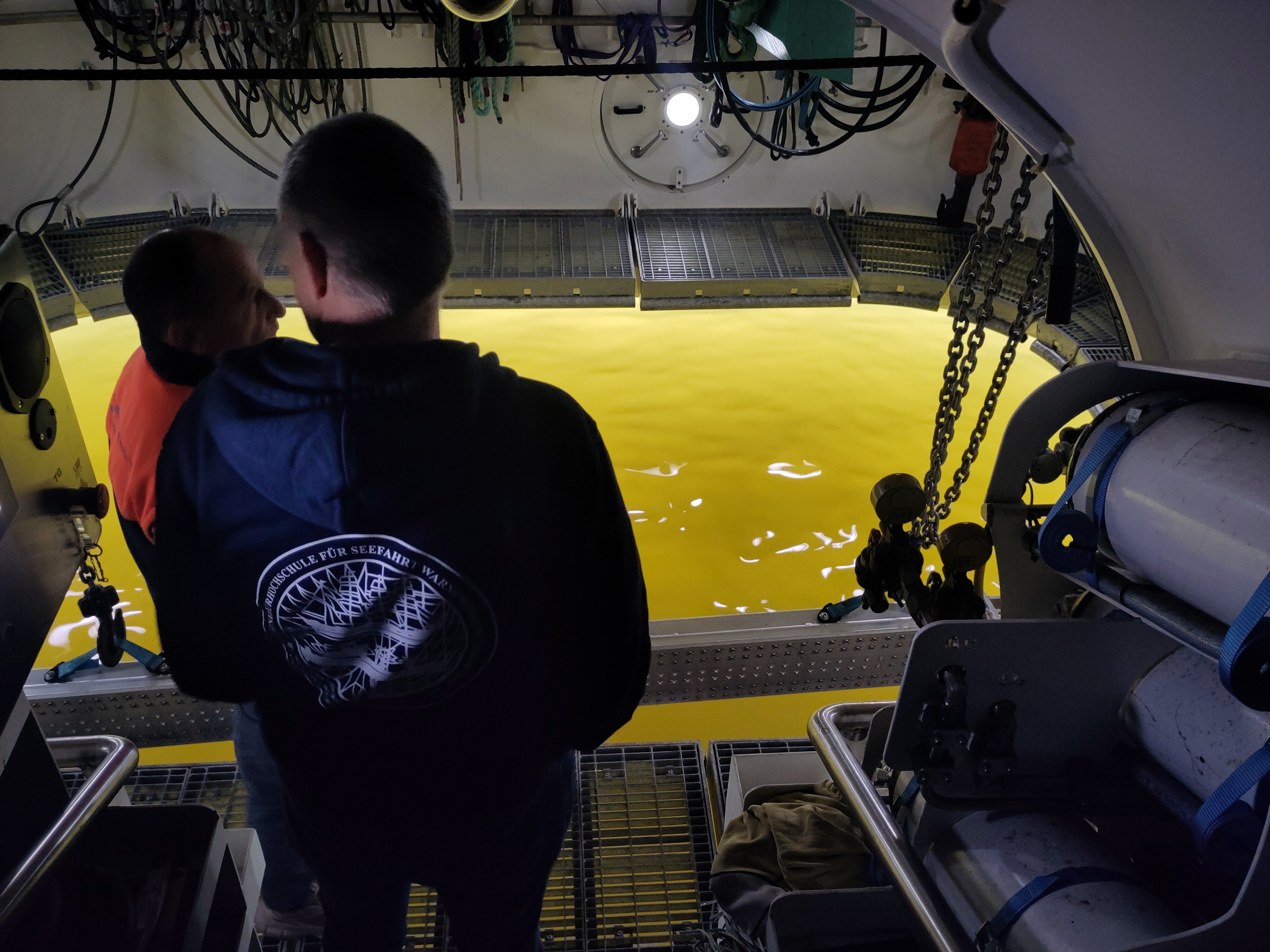
Following delays caused by repairs, the first test runs on the WSA-Rhein’s Archimedes submersible vessel took place from March 9 to 11 for model identification. At the same time, network communication tests were also successfully completed. In addition to the Chair of Control Engineering, Schottel and Wismar University were also on site. The measurement results from the test runs will be used to determine a realistic motion model of the ship for control engineering and simulation applications within the framework of the StruMan project. In addition to the project work, there was also time for a tour of the unique special-purpose ship and its diving bell.


Further testing of the ROV magazine: Automatic docking during forward movement

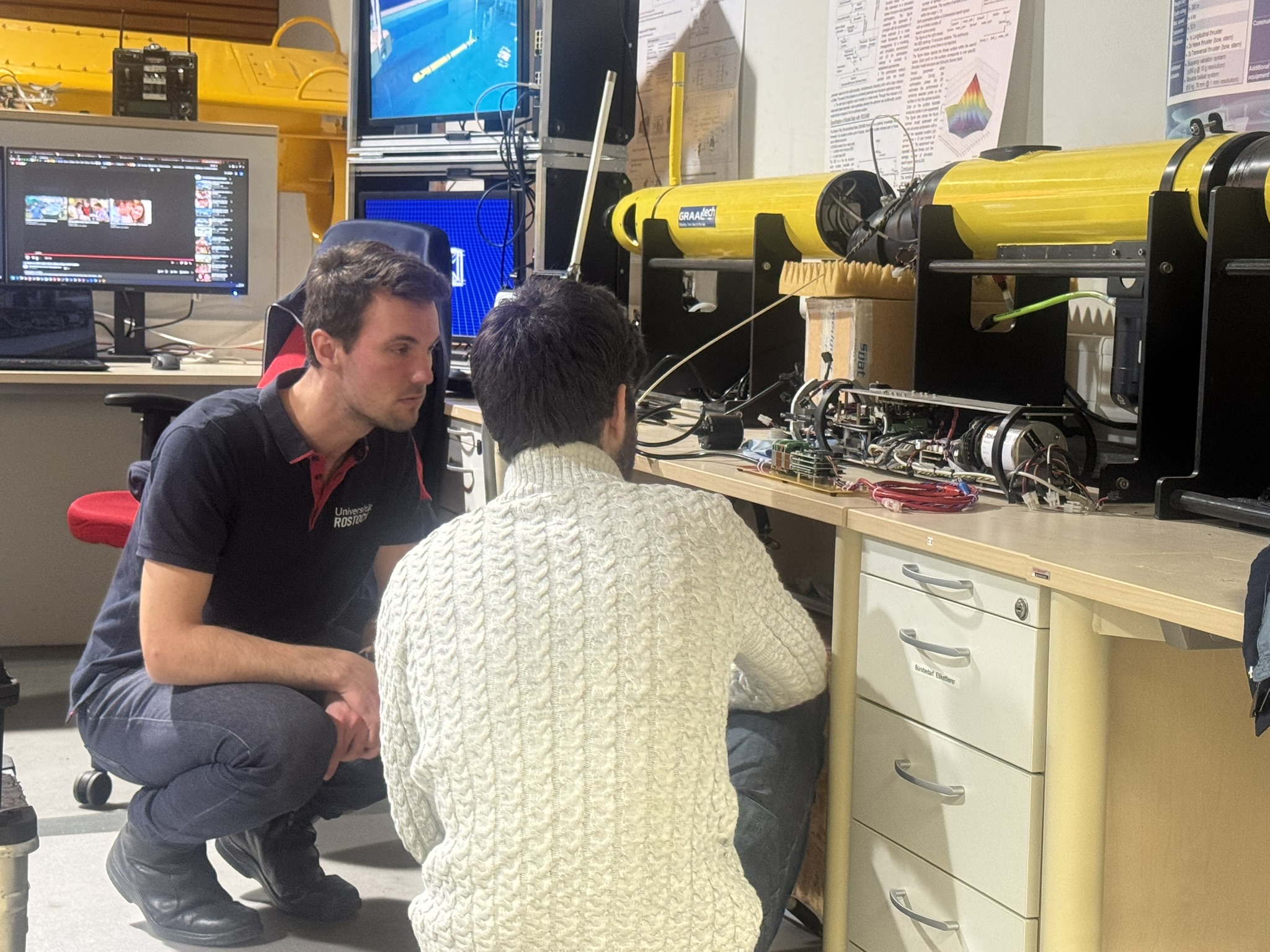
From March 2 to March 6, 2026, testing of the ROV magazine continued as part of the MUM project. The focus of this series of tests was on improving the reliability and reproducibility of the automatic docking and undocking of the remotely operated vehicle (ROV).
The optical localization solution for the final phase of the docking process was expanded to include a second docking camera and fine-tuned algorithmically. In addition, an acoustic localization solution was used for the first time to cover longer distances beneath the magazine, in order to support the approach phase.
In addition, new control algorithms for the precise free positioning and orientation of the ROV in all six degrees of freedom were tested. The tether management system was also further optimized, for example, with regard to the reliable estimation of the currently deployed cable length.
A key milestone was the successful demonstration of automatic docking and undocking while the magazine was moving forward. This corresponds to the future operational scenario, in which the ROV magazine will be integrated as a module into the overall MUM vehicle and operated while the vehicle is in motion. A key milestone was the successful demonstration of the The results represent an important step toward integrating the ROV magazine into the MUM system and were achieved in close collaboration with our partners at the Technical University of Berlin.
New Qualisys Motion Capture System Installed at the Control Engineering Application Center

With the successful acquisition of an additional motion-capture system and the accompanying training on February 25 and 26, 2026, the experimental infrastructure of the test tank at the University of Rostock’s Control Engineering Application Center was further expanded in a targeted manner. The existing marker-based localization system for underwater use, which previously consisted of eight Miqus M5U cameras from Qualisys, has been supplemented by a new camera system consisting of ten Miqus M3 cameras from the same manufacturer for use above water.
This expansion enables, for the first time, a combined, precise tracking of movements both above and below the water surface, opening up a wide range of new possibilities for cross-domain research. For example, complex interactions between cooperating multi-robot systems in hybrid maritime environments can now be investigated under laboratory conditions. The precise capture of motion data enables a thorough analysis and validation of control and regulation algorithms as well as motion sequences.
The motion-capture system was procured independently of existing funding projects and was financed with independent funds. However, the expanded infrastructure ideally complements the experimental capabilities planned as part of the approved DFG major research facility “Modular Maritime Experimental Platform for Research into Multi-Domain Vehicle Systems.”
Kickoff Meeting for the Collaborative Project “ModularShipAssist 2”

On January 15, 2026, the kick-off meeting for the collaborative project “ModularShipAssist 2 – Autonomous and Cooperative Modules for Commanded Ship Assistance in Ports” took place in Hamburg at the consortium leader’s offices, Fairplay Schleppdampfschiffs-Reederei Richard Borchard GmbH.
The project partners—Fairplay Schleppdampfschiffs-Reederei Richard Borchard GmbH, J.M. Voith SE & Co. KG | VTA, the Technical University of Hamburg, and the University of Rostock—are working together with the associated partners, HPA Hamburg Port Authority AöR and the Hamburg Harbor Pilots’ Association, to consistently advance the development of a modular assistance system. The goal is to support ship maneuvering in ports more safely, efficiently, and reliably in the future.
The joint project “ModularShipAssist 2” is funded by the Federal Ministry of Digital and Transport with approximately 2.6 million euros.
Note: Final Demonstration of the “ModularShipAssist” Collaborative Project
On Thursday, April 23, 2026, from 10:00 a.m. to 3:00 p.m., the final demonstration of the “ModularShipAssist” project consortium will take place at the University of Rostock’s water sports facility / boathouse.
The event will feature model-scale demonstrations of the ModularShipAssist system on open water, as well as a presentation of key project findings as part of a concise series of talks.

“OPEN AZR” Open House at the Control Technology Application Center
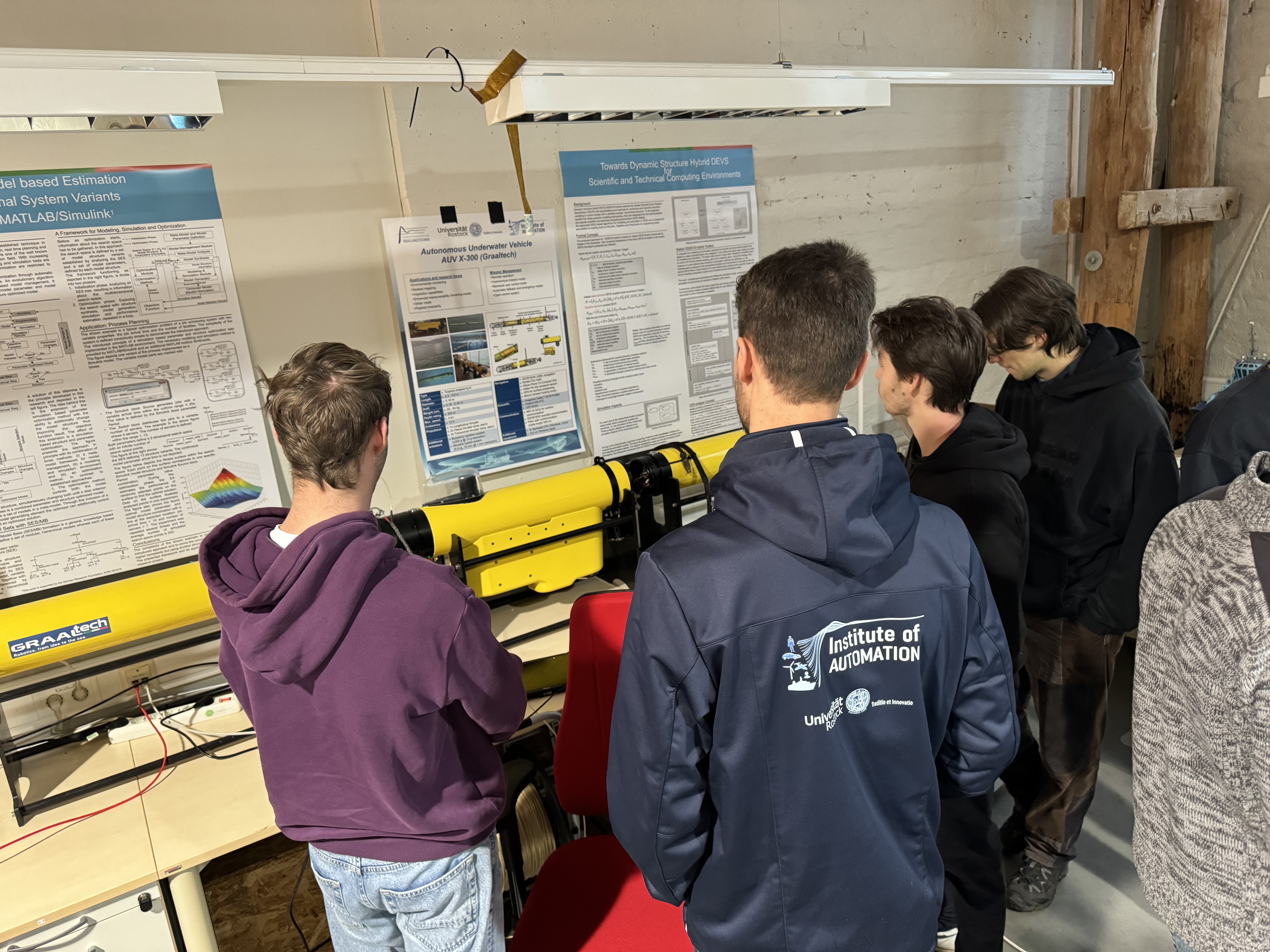
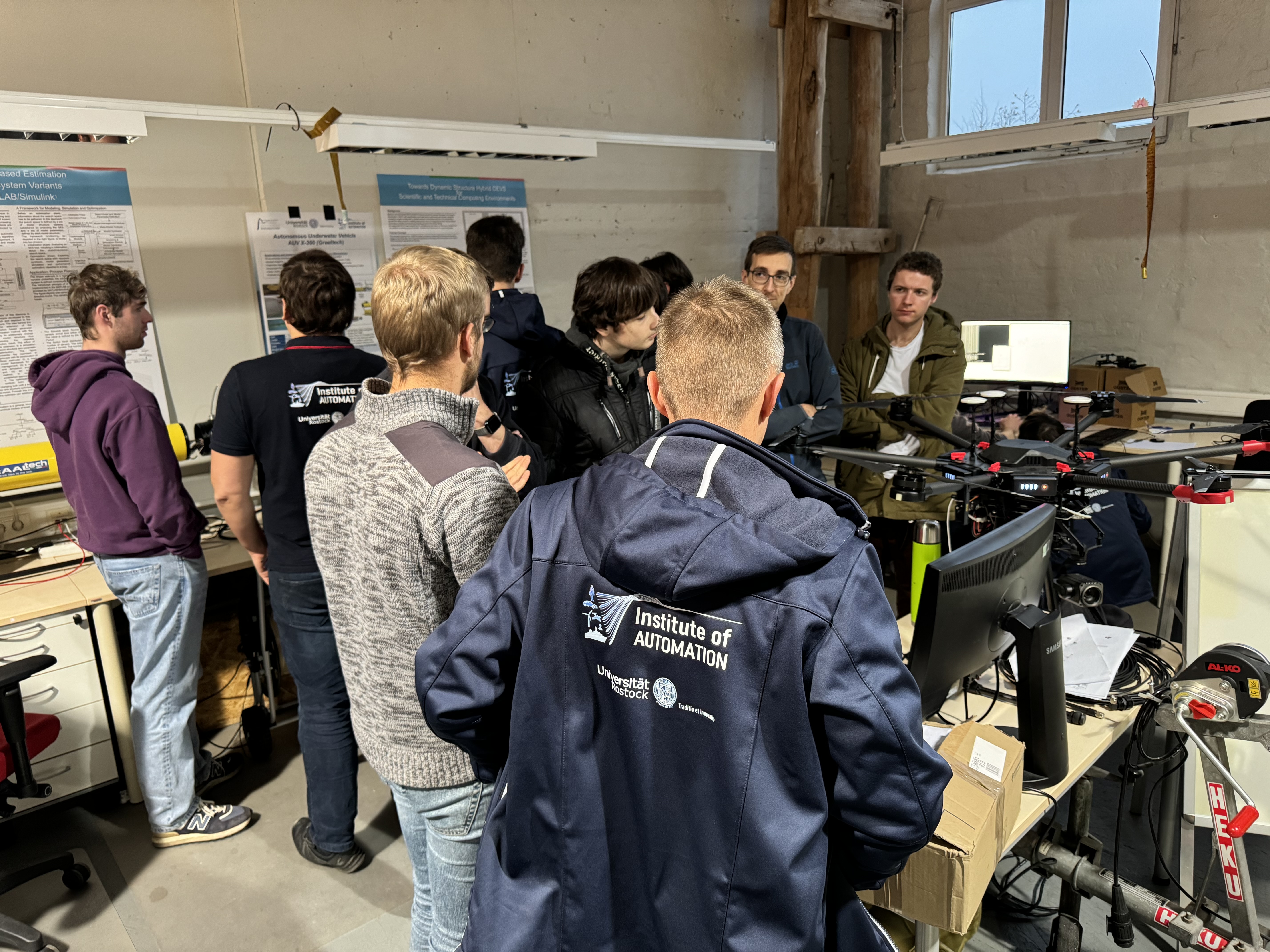
On December 15, 2025, from 3:00 p.m. to 6:00 p.m., the Control Engineering Application Center opened its doors once again this year to all semesters of the bachelor's and master's programs in computer science and electrical engineering, as well as guests, and welcomed them warmly.
Visitors were able to view and try out autonomous and remote-controlled surface and underwater vehicles, ground effect vehicles, rovers, and drones, experience the laser scanner in action during surveying, or test their skills on a bicycle with rear-wheel steering.
We would like to thank all our guests. See you next year.

New book chapter published by Springer Nature
We are pleased to announce that the reference book “Process Monitoring, Fault Diagnosis, and Tolerant Control for Complex Industrial Systems” has now been officially published by Springer Nature and is available for free download as an open access eBook.
The Control Engineering Chair contributed the following chapter:
Chapter 10
Adaptive Neural Fault-Tolerant Observer-Based Stabilization of Uncertain MIMO Time-Delay Nonlinear Systems with Dead-Zones and Faults in Actuators
Reza Shahnazi, Torsten Jeinsch, Adel Haghani
The book is now available online:
eBook ISBN: 978-981-96-9033-6
Print ISBN: 978-981-96-9032-9
The complete eBook can be downloaded free of charge via the Springer Nature platform.
link.springer.com/content/pdf/10.1007/978-981-96-9033-6.pdf
link.springer.com/download/epub/10.1007/978-981-96-9033-6.epub
We would like to thank Springer Nature for their cooperation and are delighted that our chapter is now available to an international audience.
Handover of funding approvals for the joint project “ModularShipAssist 2”
With the launch of six new IHATEC joint projects on December 1, 2025, the Federal Ministry of Digital and Transport is sending a strong signal about the innovative strength of the German port industry. Parliamentary State Secretary Christian Hirte presented the funding certificates to the participating research consortia at a joint event and praised their contributions to the future viability of maritime logistics.
One of the new projects is “ModularShipAssist 2 – Autonomous and cooperative modules for commanded ship assistance in ports,” which is being funded by the Federal Ministry with around 2.6 million euros. The participants are Fairplay Schleppdampfschiffs-Reederei Richard Borchard GmbH, J.M. Voith SE & Co. KG | VTA, the Technical University of Hamburg, and the University of Rostock (Chair of Control Engineering).
Building on the successful results of the previous project, the consortium is continuing to develop the modular assistance system with the aim of making ship maneuvers in ports safer, more efficient, and more reliable in the future. New functions for high-resolution environment detection, intelligent mission planning, and energy management will enable robust operation even under complex conditions.
ModularShipAssist 2 is an important building block for the safe integration of autonomous and highly automated ships into port processes and, at the same time, an economically viable addition to traditional tugboat operations.
Further information on the IHATEC projects can be found at:
www.innovativehafentechnologien.de






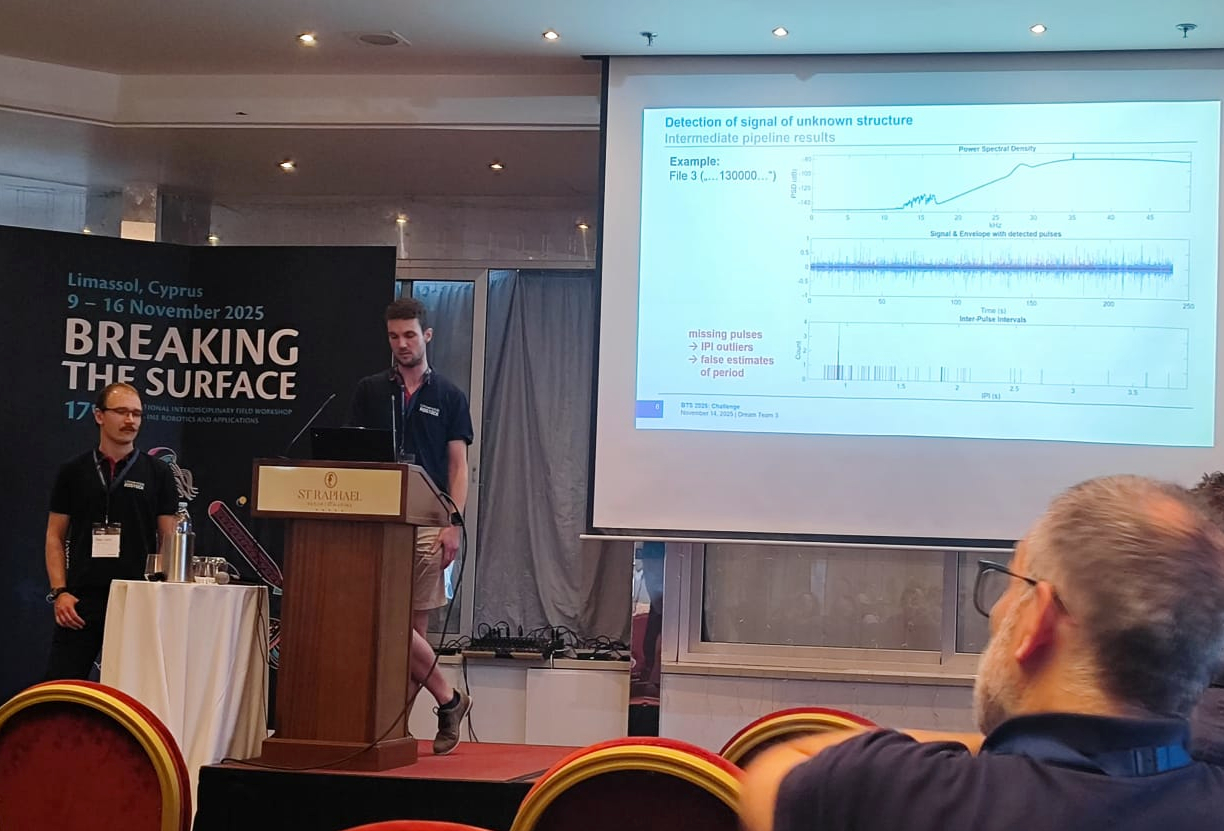
„Breaking the Surface“ BTS 2025

The 17th international workshop “Breaking the Surface” took place this year for the first time in Limassol, Cyprus, from November 9 to 16. For years, the workshop has brought together experts from the fields of maritime robotics, marine biology, marine archaeology, marine geology, and maritime safety. Carsten Rethfeldt and Sven Lack from the Chair of Control Engineering at the University of Rostock made intensive use of the event for professional exchange and were able to gain valuable insights into current research work, technological developments, and future trends in the maritime environment through the numerous presentations by international guests.
The “Detection of Underwater Acoustic Signals Challenge” took place on the sidelines of the workshop. The aim of this competition was to detect acoustic signals transmitted underwater in a real environment and to analyze and evaluate their properties. In a very strong international field of participants, the decision was extremely close, but in the end, the team from the University of Rostock successfully prevailed and won the competition.


Testing modern sensor technology for ferry automation
On October 16, extensive tests were carried out on the Warnowstromer as part of the WarnowstromerAI project to test sensor solutions for the future automation of ferry operations under real operating conditions.
This time, the tests focused on the short range, in particular on scenarios relating to automated docking. State-of-the-art LiDAR, radar, and camera systems were used, which in combination enable precise detection of the environment. In addition, marker-based position determination in the area of the docking station was tested.
The tests took place under changing weather conditions, from bright sunshine to thick cloud cover. This variety proved particularly valuable, as it allowed conclusions to be drawn about the reliability of the sensor technology under different lighting conditions.
The data obtained in the process forms an important basis for the further development, calibration, and validation of the systems in the context of ferry automation.



Presentations at the 8th International Conference on Autonomous Surface Ships (ICMASS) 2025


The 8th INTERNATIONAL CONFERENCE ON AUTONOMOUS MARITIME SYSTEMS (ICMASS), together with the 1st SYMPOSIUM ON INTELLIGENT AND SMART SHIPPING (ISSS) took place in Hamburg from October 8 to 9, 2025, and was jointly organized by the German Society for Positioning and Navigation (DGON) and Fraunhofer CML.
The conference featured presentations and discussions on topics ranging from technical and regulatory requirements for the operation of autonomous ships and challenges for ports and terminals to innovations in navigation when dealing with other ships and objects in the water.
Our chair was represented with two contributions:
The contribution Automated Maneuvering of Networked Vessels in Confined Waters was presented by Nick Eisenblätter and Tim Rehbronn (RWTH Aachen University) and is available at DOI 10.1088/1742-6596/3123/1/012020.
The paper Bridging XLUUV and MASS – Technologies for Autonomous Multi-Domain Operations was presented by Carsten Rethfeldt and is available at DOI 10.1088/1742-6596/3123/1/012019.
Testing of scaled towing modules in the port of Rostock as part of the ModularShipAssist project

The aim of the ModularShipAssist project (https://www.rt.uni-rostock.de/forschung/aktuelle-projekte/modularshipassist/) is to develop an autonomous, modular assistance system consisting of a variable number of electrically powered tug modules. The modules are designed to provide harbor pilots or captains of the supported ships with simple and intuitive assistance when maneuvering in the harbor.
In the current project phase, the capabilities of the developed assistance system are being tested on a model scale under real conditions in the port of Rostock.
We would like to thank the Federal Ministry of Transport and the project sponsor TÜV Rheinland for their support, as well as our project partners Voith, Hamburg University of Technology, the Fairplay Towage Group, and the Hamburg Harbor Pilots' Association for their assistance.
Check out the latest video of the tests from September 24, 2025, on our YouTube channel: https://youtu.be/oVAkScgb8-Y
Participation in VDI/VDE-GMA-FA 2.14 System Theory and Control Engineering
From September 15 to 17, 2025, the GMA Technical Committee 2.14 System Theory and Control Engineering met in Anif/Salzburg, Austria.
The thematic focus of the GMA Technical Committee 2.14 concerns current developments in system theory and control engineering and their application in industrial environments. Current focal points are
Model predictive control of dynamic systems
Nonlinear observers
Control of networked and distributed parametric systems
Data-based control.
This year, the Chair of Control Engineering at the University of Rostock was represented by Reza Shahnazi with the presentation of the paper “Observer-based Funnel Heading Control with Prescribed Settling Time for Ships: Addressing Rudder Dynamics and Saturation.”


Doctoral thesis defense by Dr.-Ing. Sven Lack

On September 11, 2025, Dr. Sven Lack successfully defended his dissertation on “Contribution to the Control of Submerged Multi-Body Systems” at the Faculty of Computer Science and Electrical Engineering at the University of Rostock.
The members of the doctoral committee were: Prof. Kühn (chair) – University of Rostock, Prof. Jeinsch – University of Rostock, Prof. Dünow – Wismar University of Applied Sciences, Prof. Kosleck – University of Rostock, Prof. Thurow – University of Rostock, Prof. Gräser – University of Rostock, Prof. Fellmann – University of Rostock.
Congratulations!
Testing in the A-SWARM II project at Behala in Berlin

From September 1 to 5, 2025, a joint test was conducted on the premises of our project partner BEHALA in Berlin as part of the A-SWARM II research project. In addition to BEHALA, the project partners SVA and Veinland were also involved.
The focus of the test week was the commissioning of the first test vehicle in the BEHALA harbor basin. Key system functions were successfully tested. The installed technology enables control of the motors, precise environment detection, and remote access to the vehicle – thus laying the foundation for further automation of the system.
The joint test gave all participants the opportunity to test and optimize the interaction of the various system components directly on site and to gain valuable experience for the upcoming project phases.






Participation in the 16th IFAC CAMS 2025 Conference in Wuhan, China

From August 25 to 28, 2025, the 16th IFAC Conference on Control Applications in Marine Systems, Robotics and Vehicles (CAMS) took place at Huazhong University of Science and Technology (HUST) in Wuhan, China.
CAMS is one of the leading international conferences in the field of maritime control engineering and this year focused on the topic of “Intelligent Marine Systems Driven by Blue Economy.”
The Chair of Control Engineering at the University of Rostock was represented this year with contributions from Enrico Gutwald, Martin Gülland, and Reza Shahnazi.
Enrico Gutwald presented the paper “LiDAR-Based Pose and Extension Estimation of Maritime Vessels” in the “Marine Perception” session.
In the “Marine Vehicle Docking” session, Martin Gülland presented the paper “Experimental Evaluation of Fiducial Marker-Based Localization Method for ROV Docking.”
Torsten Jeinsch presented the paper “Observer-Based Funnel Heading Control with Prescribed Settling Time for Ships: Addressing Rudder Dynamics and Saturation” in the “GNC for Marine Vehicles” session.



29th International Conference on Methods and Models in Automation and Robotics (MMAR 2025)
This year's edition of the International Conference on Methods and Models in Automation and Robotics (MMAR 2025) took place from August 26 to 29. Over a hundred participants gathered in Misdroy, Poland, to present and discuss new developments and research results. Alexander Schöley from the Control Engineering Chair participated with a presentation entitled “Challenges of Hamilton-Based Stability Investigation of Grid-Tied Inverters.” We are looking forward to the 30th edition of MMAR next year!


Book "Maritime Control and Sensor Systems: Automated Ship Navigation – with MATLAB® and Simulink®

The second revised edition of the book Maritime Control and Sensor Systems (link: link.springer.com/book/10.1007/978-3-658-47579-6) by Jürgen Majohr and Martin Kurowski was published by Springer Verlag on August 5, 2025.
The book describes the necessary fundamentals for the design and application of maritime control systems. Using modern methods of modeling and control theory, it covers navigation systems and sensors, control structures and assistance systems, and even a newly developed maneuver control system. The methodically presented material is clearly interpreted through a variety of calculation examples and simulations created with MATLAB® and Simulink® based on on-board data.
Das Buch schließt eine vorhandene Lücke in der deutschsprachigen Literatur zu maritimen Regelungs- und Sensorsystemen und wendet sich an Ingenieure, Mitarbeiter und Seefahrtpraktiker in allen
Zweigen der Seewirtschaft und ihrer Zulieferindustrie. Auch Ingenieuren und Praktikern in der Automatisierungstechnik, Elektrotechnik und Informatik kann der Titel Anregungen für den Entwurf von Regelungs- und Sensorsystemen sowie zur Einarbeitung in die Satellitennavigationstechnik geben. Lehrenden und Studierenden an Aus- und Weiterbildungseinrichtungen in den genannten Fachbereichen kann das Buch als Nachschlagewerk empfohlen werden.
The book fills a gap in German-language literature on maritime control and sensor systems and is aimed at engineers, employees, and maritime practitioners in all
branches of the maritime industry and its supply industry. Engineers and practitioners in automation technology, electrical engineering, and computer science can also find inspiration in this title for the design of control and sensor systems and for familiarization with satellite navigation technology. The book can be recommended as a reference work for teachers and students at educational and training institutions in the aforementioned fields.
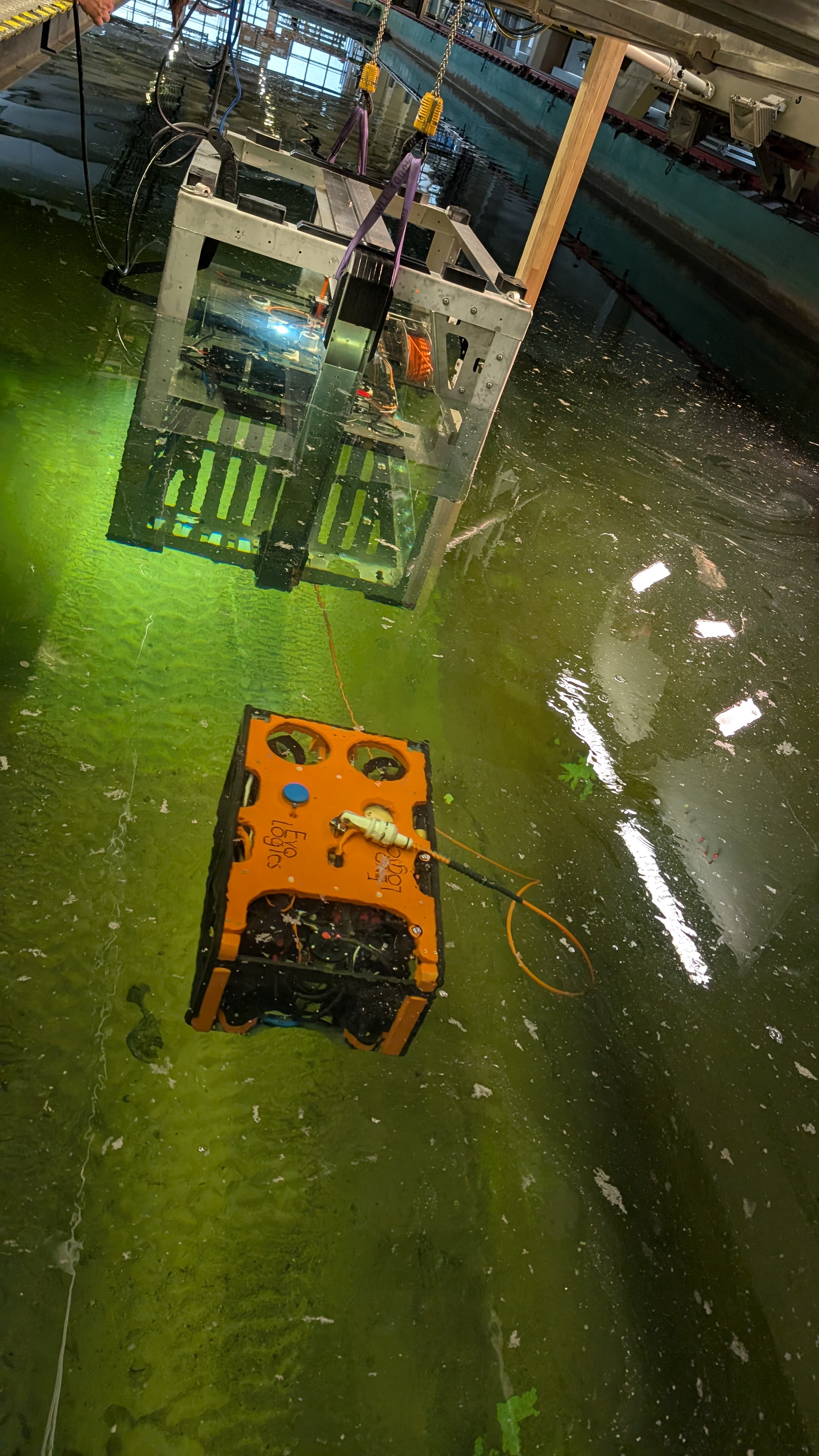
Testing for the automation of an ROV magazine
From August 18 to 22, employees of the Control Engineering Chair at the Department of Design and Operation of Maritime Systems at the Technical University of Berlin were guests at the Water and Shipbuilding Research Institute (VWS). Experiments were conducted with an ROV (Remotely Operated Vehicle) at the VWS. The aim was to test the automation of an ROV magazine, into which the vehicle will dock and undock independently in the future.
The tests were carried out as part of the MUM project (https://mum-project.de). In this project, an extra-large unmanned underwater vehicle (XLUUV) is being developed in collaboration with partners TKMS, TKMS ATLAS ELEKTRONIK GmbH, EvoLogics GmbH, DLR e.V., and Fraunhofer. The ROV magazine will form a module of this XLUUV and, together with the ROV, enable autonomous deployment for civilian missions.

obituary

On August 14, 2025, our esteemed colleague and friend
Prof. Dr. sc. techn. h. c. Efim Natanovich Rosenwasser
passed away at the age of 93.
With his passing, we have lost an outstanding scientist, respected university professor, and beloved human being.
Efim Natanovich Rosenwasser's work as a mathematician and control engineer had a significant international impact for many decades. His fundamental contributions to the theory of digital control gained worldwide recognition early on.
From the 1990s until well into his old age, his work was particularly closely linked to the University of Rostock. The projects he initiated and the numerous joint publications contributed significantly to strengthening the visibility of Rostock's control engineering on the international stage. In recognition of his achievements, he was awarded an honorary doctorate by the University of Rostock in 2002.
In addition to his scientific brilliance, he was distinguished by his modesty, warmth, and collegiality.
We will remember Efim Natanovich as an enthusiastic scientist, valued colleague, and good friend. His memory and scientific legacy will live on.
Our deepest sympathy goes out to his family.
Colleagues at the Institute of Automation Technology at the University of Rostock
Measurement campaign as part of the A-SWARM II project in cooperation with Deutsche Post DHL

On July 30, 2025, a joint measurement campaign with our project partner Deutsche Post DHL took place in Berlin as part of the A-SWARM II research project. For this purpose, DHL provided its solar boat, on which a test setup with a LiDAR sensor, GNSS compass, and camera was installed.
The aim of the measurement trip was to collect LiDAR and GNSS data in the Berlin city area along the planned extension of the solar boat route. The selected route is characterized by numerous bridges, narrow river sections, and a diverse riverbank design, thus offering ideal conditions for the further development and validation of LiDAR-based navigation filters.


Consortium meeting in the StruMan joint project

On July 1, the Chair of Control Engineering welcomed the entire consortium of the StruMan project to the fourth consortium meeting at the Control Engineering Application Center. In addition to the organizational and content-related coordination of the further course of the project, the focus was particularly on the interface test from the control system to the ship control and sensor system, which was successfully completed.
On August 31 of this year, both SICK AG and the Chair of Modeling and Simulation at the University of Rostock will withdraw from the project at the planned end of the project. We would like to thank them for their fruitful cooperation! The rest of the consortium was able to extend the project cost-neutrally until the end of 2026 in order to complete the work, particularly in connection with the “Archimedes” test vehicle.
Testing in the A-SWARM II project at Behala in Berlin
Erprobung im Projekt A-SWARM II bei Behala in Berlin
From June 23 to 27, 2025, a joint trial took place on the premises of our project partner Behala in Berlin as part of the A-SWARM II research project. In addition to Behala, the project partners SVA and Veinland were also involved.
As part of the trials, the first test vehicle was successfully equipped with computing and communication technology as well as drive components and sensors.
The installed technology enables control of the motors, precise environment detection and remote access to the vehicle and thus forms the basis for the automation of the vehicle.
During the week, the focus was on commissioning the system under dry conditions, during which central functions were successfully tested.
The trial also provided the opportunity to test and further fine-tune the interaction of the individual system components together with the project partners on site.



Final event of the SensorSOW project in Wildau

On June 26, 2025, the final event of the SensorSOW project took place at the Center for Aerospace III in Wildau. After two and a half years of intensive collaboration, the project “SensorSOW - On-board sensors and assistance systems for automated inland navigation on the Spree-Oder waterway” was officially completed.
Alberding GmbH, the Department of Design and Operation of Maritime Systems at TU Berlin and the Institute of Automation Technology at the University of Rostock worked together to develop and test innovative technologies for the high-precision detection of ships and their surroundings - both above and below water.
Our goal: more safety, efficiency and automation on our inland waterways.
The most important project results at a glance:
LiDAR-based real-time prediction of the routes of other road users (University of Rostock)
Real-time sonar system for precise fairway detection (TU Berlin)
Combined sensor unit for precise ship position determination and an integrated assistance system (Alberding GmbH)
We are delighted with the results achieved! The systems developed are an important step towards automated and networked inland navigation - and will flow directly into follow-up projects such as DigitalSOW2, which was launched in January 2025 with the same project partners.
Our special thanks go to all those involved in the project as well as the Federal Ministry for Digital and Transport Affairs (BMDV) and the Federal Office for Administrative Services (BAV) for their funding and technical and administrative support within the framework of DTW II.
Closing event GALILEOnautc 2plus

Im exponierten Deneb-Saal des BSH Rostock wurde am 24. Juni 2025 die Abschlussveranstaltung zum Projekt GALILEOnautic 2plus durchgeführt. Für das hybride Format kamen neben den Projektpartnern von der RWTH Aachen und dem Institut für Automatisierungstechnik von der Universität Rostock Vertreter des assoziierten Partners BSH als Eigner des Forschungsschiffs DENEB, der ISSIMS GmbH und des Projektträgers DLR Raumfahrtagentur sowie weitere Gäste zusammen. Die Projektpartner konnten in Vorträgen ihre umfassenden Ergebnisse zu den notwendigen Einzelmodulen für das optimierte, kooperative, automatische Manövrieren in sicherheitskritischen Bereichen vorstellen, in das im Hafen drei Fahrzeuge im involviert waren. Die RWTH hat sich vorrangig mit der optischen Umfelderkennung mittels Lidar und Radar befasst und dazu innovative Methoden entwickelt. Der Lehrstuhl Regelungstechnik der Universität Rostock lieferte:
die Szenario- und Systemkonzeption,
die Optimierung zur Berechnung der Ausweichtrajektorien für die Kollisionsvermeidung und
die Regelung, um jedes Fahrzeug auf seiner Trajektorie zu halten, wobei jeweils ein nichtlinearer, modellprädiktiver Regler eingesetzt wurde.
Auszugsweise wurde von den verschiedenen, erfolgreich absolvierten Manövern berichtet. Im Anschluss wurde in großer Runde diskutiert, wie Assistenz- und Automationssysteme in der Schifffahrt forciert eingesetzt sowie maritime Forschung und Industrieentwicklungen besser verzahnt werden können.
We would like to expressly thank the aforementioned institutions for their support and excellent cooperation, especially the DENEB crew, who made the successful completion of the project possible in the first place through their imaginative and competent efforts, as well as the funding from the Federal Ministry for Economic Affairs and Energy.



2nd specialist conference “New technologies and test fields for waterways and ports”

On June 11 and 12, 2025, the 2nd “New Technologies and Ports” conference took place at the Federal Ministry of Transport in Berlin.
The event focused on technological developments in ports and on waterways. The focus was on measures for automation and digitalization as well as testing opportunities for innovations in the area of inland waterways and port infrastructure.
The conference program was largely shaped by research topics from three funding programs of the Federal Ministry of Waterways:
Digital Test Fields in Ports (DigiTest),
Digital Test Fields Waterways (DTW) and
Innovative Port Technologies (IHATEC).
The Institute of Automation Technology presented the WarnowstromerAI and DigitalSOW II research projects to the specialist audience in short presentations and at project stands.


Participation in the ISOPE 2025 conference in Seoul/Goyang
The international conference ISOPE 2025 (International Society of Offshore and Polar Engineers) took place from June 01 to 06, 2025 at the Kintex Conference Center in Seoul/Goyang, South Korea. The ISOPE conference is one of the world's leading events in the field of offshore, marine and polar technology and offers an annual platform for scientific exchange on innovative research work in the fields of ocean, offshore, shipbuilding, energy and environmental technology.
This year, the Chair of Control Engineering at the University of Rostock was represented by Johannes Marx with the presentation of the paper
"Constrained Parameter Estimation for Ship Maneuvering Models to Increase Physical Reliability".
The work presented deals with reliable and physically consistent parameter estimation for maneuvering models of ships. The aim is to improve the physical reliability of such models, especially under consideration of real boundary conditions.
Located and funded in the StruMan project, the results also result from a collaboration between our chair and the Division of Maritime Studies at Chalmers University of Technology in Gothenburg, represented in particular by Dr. Wengang Mao.


Final event of the GN2plus project: Autonomous navigation and cooperative maneuvering

The GALILEOnautic project series is dedicated to autonomous navigation and optimized manoeuvring of cooperating ships in safety-critical areas.
At the end of the current GN2plus project, we cordially invite you to the final event on June 24, 2025 at the Federal Maritime and Hydrographic Agency (BSH) in Rostock. As part of the event, we will present the research results using a networked, cooperative maneuver around the automated BSH research vessel Deneb.
If you are interested in participating in person or virtually, please register by June 13, 2025.
Doctoral defense Dr.-Ing. Robert Damerius

On May 28, 2025, Dr.-Ing. Robert Damerius successfully defended his dissertation on “Contribution to motion planning of autonomous watercraft” at the Faculty of Computer Science and Electrical Engineering at the University of Rostock.
Members of the doctoral committee were: Prof. Eckel (Chairman) - University of Rostock, Prof. Rauh - University of Oldenburg, Prof. Jeinsch - University of Rostock, Prof. Fleischer - University of Rostock, Prof. Damaschke - University of Rostock, Jun.-Prof. Oehmcke - University of Rostock and Prof. Salomon - University of Rostock.
Congratulations!
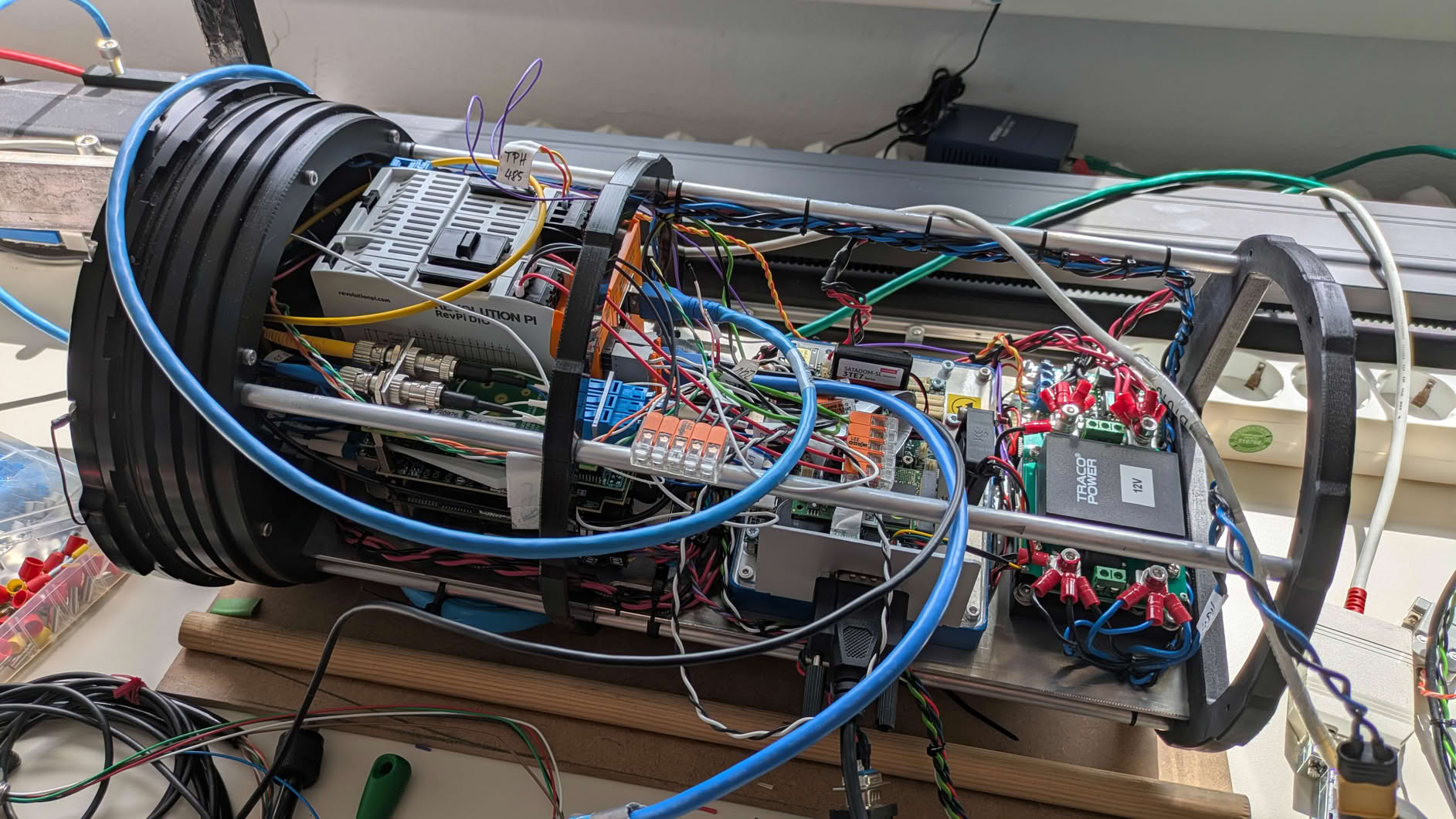
ROV-Magazin: Successful commissioning “in the dry”
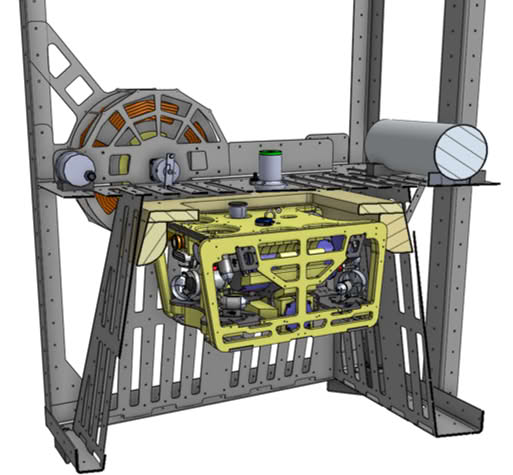
From May 21 to May 23, 2025, we took the opportunity to carry out the piece-by-piece commissioning of the ROV magazine together with colleagues from the Technical University in Berlin as part of the MUM2 project (Modifiable Underwater Mothership). The ROV magazine will serve as a dock for the Remotely Operated Vehicle (ROV) of the Chair of Control Engineering in the overall MUM vehicle and includes the mechanical structure as well as the sensors and actuators required for operation, transportation and docking and undocking. The ROV is carried as an active payload in the MUM carrier vehicle to enable underwater work to be carried out, e.g. the installation and maintenance of underwater systems. We were able to achieve the goal of this first test of the magazine, to put the control electronics and the tether management system into operation “in the dry”, in excellent cooperation with our partners at TU Berlin.

Automated cooperation manoeuvre in port: successful GN2plus trials on board the DENEB
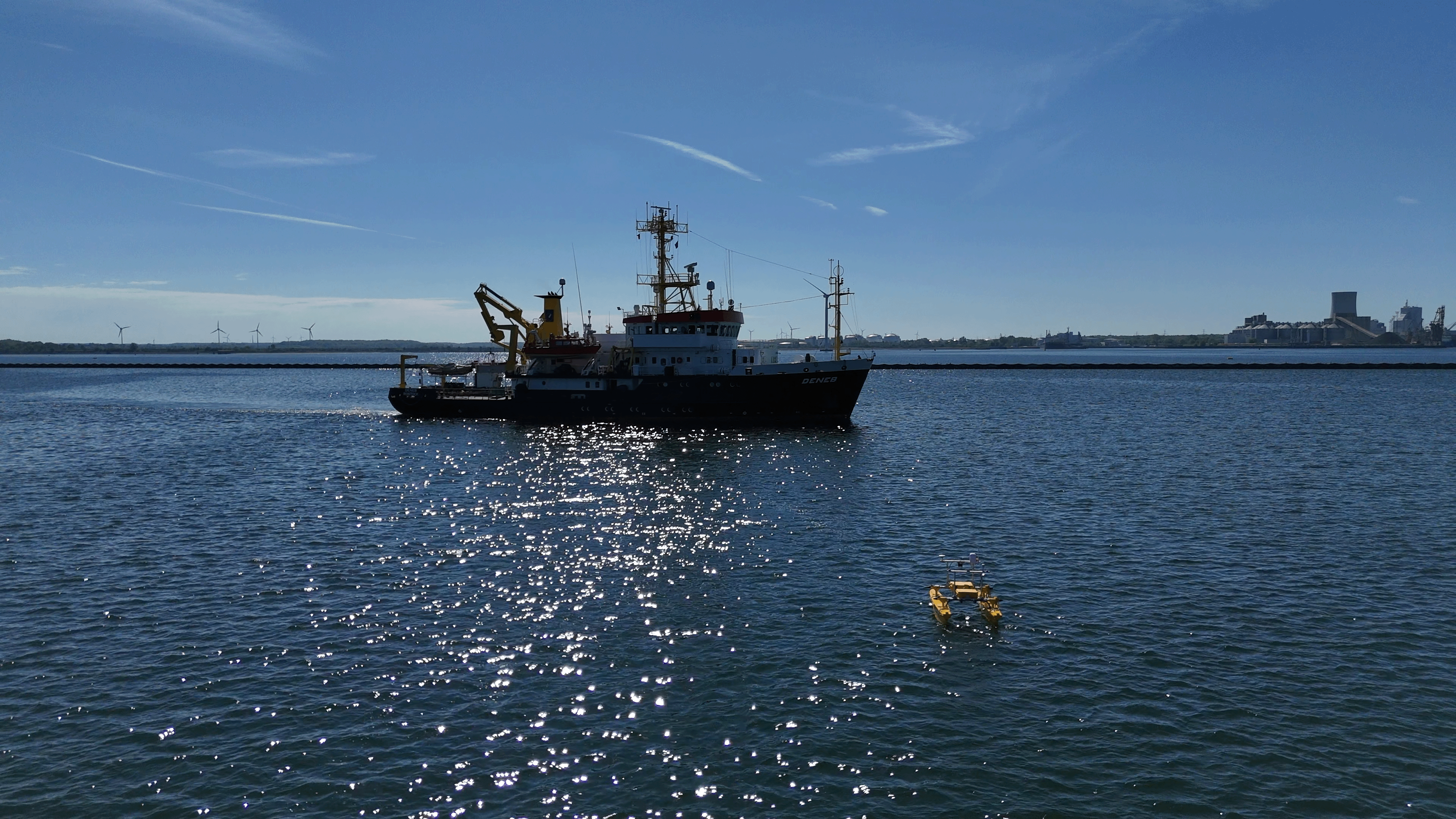
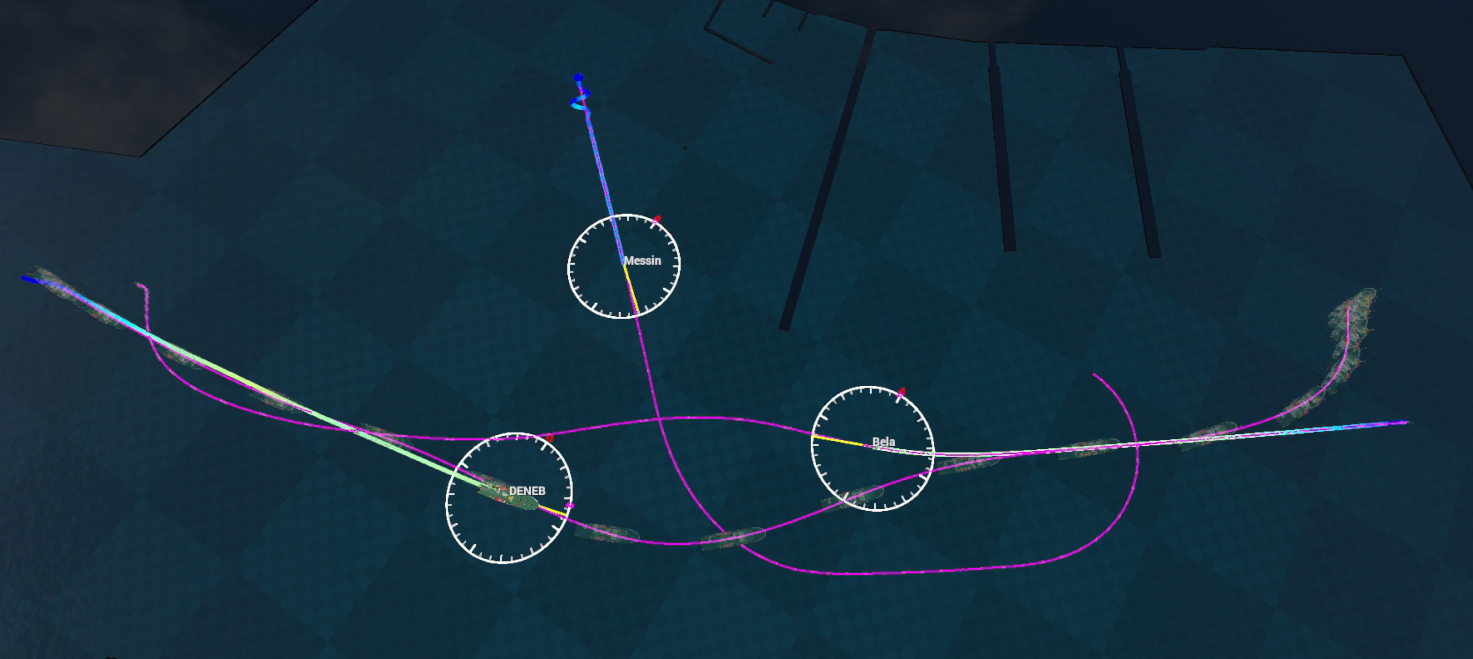
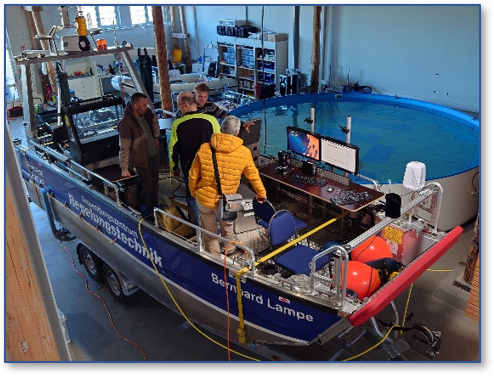
From May 5 to 10, we were once again guests on board the DENEB research vessel of the Federal Maritime and Hydrographic Agency (BSH). Together with our unmanned vehicle Messin and another virtually operating workboat, we carried out an automated cooperative port scenario. DENEB, Messin and the virtual Bernhard Lampe simulated a complex encounter and crossing scenario in the port of Rostock. The nautical relevance and transferability was ensured by the expertise of the BSH colleagues - a significant contribution to the overall project.
An interdisciplinary research team, consisting of the Institute for Control Engineering at RWTH Aachen University and the Institute for Automation Technology at the University of Rostock, jointly tested the latest developments in the field of environmental perception and automated vehicle guidance.
- RWTH Aachen University was responsible for environment perception, including object classification and tracking using LiDAR and radar.
- The maritime research group at the University of Rostock was responsible for cross-vehicle trajectory planning and vehicle control using non-linear optimization and model predictive control.
- The central planning of the evasion trajectories for all three vehicles was carried out taking into account the local port restrictions and the COLREGs (collision prevention regulations) for the port area.
Many thanks to the entire crew of the DENEB, both above and below deck, for their great support, helpful discussions and valuable advice, which contributed to the success of the trials.
The tests were carried out as part of the GN2plus project - our thanks go to the DLR Project Management Agency for the financial support.

First trial in 2025 in the GN2+ cooperative maneuvering in port project

In preparation for the major test in May for cooperative maneuvering with three vehicles, the research vessel DENEB (Federal Maritime and Hydrographic Agency, BSH) and two test carriers from the University of Rostock, Bernhard Lampe and MESSIN, an initial test was carried out from 7-11 April. The project partners from RWTH installed and tested their sensor and computer technology on the test vehicles. In addition, communication between the vehicles via VPN for the transmission of navigation data was successfully tested. The new control solution using MPC was tested for the unmanned vehicle MESSIN. Representatives from the BSH, including the deputy captain of DENEB Michael Quandt, were on site to familiarize themselves with the test vehicles and discuss the safety aspects of cooperative manoeuvring.

59th Control Engineering Colloquium in Boppard
Every year, representatives from the chairs of control and automation technology from German-speaking countries come together in Boppard for the Control Engineering Colloquium. In addition to scientists, experts from industry and associations also take part.
The colloquium serves as a platform for professional exchange and the discussion of current research ideas. This year, Dr.-Ing. Alexander Schöley from the Chair of Control Engineering presented his research results on the stability analysis of grid synchronization of converters in weak grids.


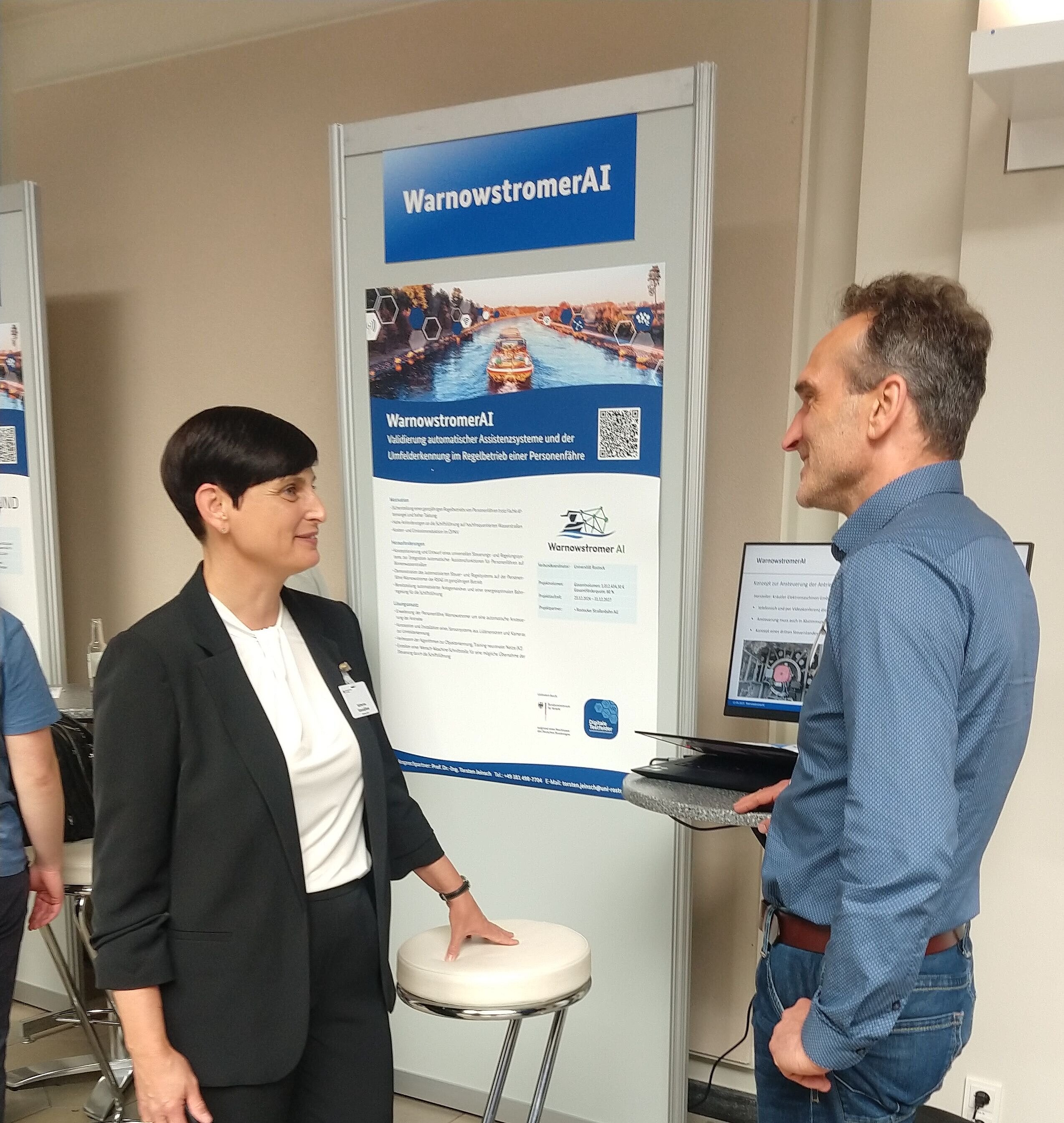
Rostocker Straßenbahn AG and the University of Rostock launch research project for automated assistance systems on passenger ferries


Rostocker Straßenbahn AG (RSAG) has successfully acquired the WarnowstromerAI research project together with the Institute for Automation Technology at the University of Rostock.
The aim of the project is to develop a control and regulation system that integrates automatic assistance functions on inland ferries. The focus is on a universal solution that takes into account economic, technical and licensing aspects. The technologies developed will be tested on the RSAG passenger ferry Warnowstromer. The ship will be equipped with imaging sensors and an interface for the automated control of the drives.
Photos: Joachim Kloock
Foto 1 v.l.n.r.: Dr.-Ing. Björn Kolewe, Institut für Automatisierungstechnik der Uni Rostock, RSAG-Vorstand Jan Bleis, RSAG-Fährkoordinatorin Anke Krocker und der zuständige Senator Dr. Chris von Wrycz Rekowski
Project launch “Connected and automated driving on the Spree-Oder waterway (SOW)”

The official kick-off event for the DigitalSOW2 innovation project took place on 25.03.2025 in the port of Königs Wusterhausen. The aim of the project is to further develop automation in waterway transportation on the Spree-Oder waterway.
DigitalSOW2 is being carried out by a consortium consisting of Alberding GmbH (Wildau), the Department of Design and Operation of Maritime Systems at TU Berlin and the Institute of Automation Technology at the University of Rostock. The project is being funded as part of the third funding guideline for the development of digital test fields on federal waterways (DTW III).
The focus is on the further development of a digital assistance system and V2X communication between the test vehicle and the onshore infrastructure. In addition, simulations are being developed to assess the technical and economic use of the test carrier “Boris Kluge” in multimodal transport processes. The University of Rostock is focusing on causal and verifiable object recognition and positioning using LIDAR sensors on inland waterways.
The DigitalSOW2 project represents an important step towards digitalized and sustainable inland waterway transport.
Photo: Alberding GmbH
Translated with DeepL.com (free version)
Bildunterschrift (v.l.n.r.): Emirhan Üzüm (Technische Universität Berlin), Enrico Schütz (Technische Universität Berlin), Jörg Zimmermann (Alberding GmbH), Jürgen Alberding (Alberding GmbH), Daniel Brunner (Alberding GmbH), Theo Timmermann (Alberding GmbH), Meinard Gimm (Technische Universität Berlin), Prof. Dr. Torsten Jeinsch (Universität Rostock)
Book “Sampled data control for periodic objects”
„Sampled-Data-Control for periodische Objects“
The new book “Sampled Data Control for Periodic Objects” by Efim N. Rosenwasser, Torsten Jeinsch and Wolfgang Drewelow was published by Springerverlag on March 4, 2025.
This book is dedicated to the problem of sampled-data control of finite-dimensional linear continuous periodic objects (FDLCP). It fills a research gap in the treatment of this important topic. The methods presented here are based on the parametric transfer matrix, which has proven successful in the study of sampled-data systems with linear time-invariant objects. The book shows that this concept can be successfully transferred to sampled data systems with FDLCP objects. It is divided into five parts:
an introduction to the frequency approach for the mathematical description of FDLCP objects, including the determination of their structure and their representation as a series connection of periodic modulators and a linear time-invariant object;
the construction of the parametric transfer matrix for different types of open and closed sampling systems with FDLCP objects;
solving problems of causal modal control of FDLCP objects based on the mathematical apparatus of determinate polynomial equations;
consideration of the problem of constructing a quadratic quality functional for the H2 optimization problem of a single-loop synchronous sampled-data system with dead time in the manipulated variable;
Description of the general H2 optimization method.
The necessary mathematical reference material is included in the relevant sections of the book.
Sampled-Data Control for Periodic Objects is intended for scientists and engineers engaged in the study and design of systems with FDLCP objects, for graduate students wishing to expand their skills, for their instructors, and for mathematicians working in the field of control theory.


International Ship Control Systems Symposium - INEC Konferenz in Liverpool/ UK
The Chair of Control Engineering, represented by Agnes Schubert, took part in the International Ship Control Systems Symposium (iSCSS) as part of the INEC conference in Liverpool/UK. From 5 to 7 November, scientists and nautical officers from all over the world met to present the latest results and concepts for modern and efficient shipping. In addition to the usual lecture format, there were also interactive sessions for the first time, in which a short impulse was followed by a direct discussion. The new format made it possible to respond more specifically to questions and exchange ideas about forward-looking projects. Our institute's contribution was entitled ‘Automatic Maneuvering of Vessels with Power-Optimised Thrust Allocation’ and was presented in both formats.



Presentation at the OCEANS 2024 conference in Halifax, Nova Scotia, Canada
In Canada's ‘Ocean City’ Halifax, the OCEANS 2024 conference brought together experts from maritime science and industry from all over the world from 23 to 26 September. They had the opportunity to share their latest research findings and innovations for the protection and utilisation of the oceans.
In its contribution ‘Combined Actuator Allocation for Underwater Vehicles with Variable Buoyancy Systems using QP-based Optimisation’, the Chair of Control Engineering presented its current research results on technologies for the control and regulation of unmanned underwater vehicles. These were developed as part of the research project MUM2 - Modular Underwater Mothership (www.mum-project.de), a project funded by the Federal Ministry of Economics and Climate Protection (BMWK).


6th Autonomous Inland and Short Sea Shipping Conference (AISS)
The 6th Autonomous Inland and Short Sea Shipping Conference took place this year on 10 and 11 September at the Lower Rhine Chamber of Industry and Commerce in Duisburg. The Autonomous Inland and Short Sea Shipping Conference was launched in 2019 as an annual conference to promote the technical and scientific exchange between industry, science and authorities in the fields of autonomous inland and coastal shipping as well as port logistics and intelligent water logistics.
The Chair of Control Engineering was represented there by M.Khalis Mohd Fadil and Jinhan Kong. Both presented the results of their current research:
- M. Khalis Mohd Fadil, Ian Karez, Torsten Jeinsch: ‘Constructing Waterways Map using a LiDAR-inertial odometry with Incremental Smoothing for Surface Vessel: Considering Waterways related Disturbance’
- Jinhan Kong, Ian Karez, Dongze Wang, Torsten Jeinsch: ‘Enhanced Inland Vessel Detection Using CNN-Based Deep Learning and Lidar Technology’

Presentation at the 15th IFAC CAMS 2024 in Blacksburg, Virginia, USA
From 3-5 September 2024, the 15th IFAC Conference on Control Applications in Marine Systems, Robotics and Vehicles took place in Backsburg at Virginia Tech.
The Chair of Control Engineering presented the paper: Adaptive Observer-Based Funnel Heading Control of Surface Vessels with Rudder Actuator Nonlinearity as part of the Regular Session: Adaptive Robusts. The presentation focused on the latest research results from the research project ModularShipAssist - Autonomously and cooperatively acting modules for commanded ship assistance in harbours, a project funded by the Federal Ministry for Digital and Transport Affairs (BMDV) as part of the ‘Innovative Port Technologies II (IHATEC II)’ funding guideline.
Figure 1 Beitrag Adaptive Observer-based Funnel Heading Control of Surface Vessels with Rudder Actuator Nonlinearity
Figure 2 Eröffnung der 15th CAMS 2024 durch den NOC Chair Craig Woolsey vom Virginia Tech.


MMAR2024
28th International Conference on Methods and Models in Automation and Robotics (MMAR 2024) The 28th edition of the International Conference on Methods and Models in Automation and Robotics (MMAR 2024) took place this year from August
27 to 30. The organizer of the conference, which has been running for 30 years, is the West Pomeranian University of Technology in Szczecin but the conference venue is Misdroy. Alexander Schöley from the chair of control Engineering took part in MMAR 2024 and presented research results in the paper “A Criterion for the Transient Stability of the PLL-Based Grid Synchronization”.

DENEB testing July 2024
Once again, we were able to test automatic functionalities in the GN2plus project on board the BSH ship DENEB for three days at the end of July 2024. Highlights this time included model predictive trajectory control, automatic path and movement planning and its implementation for mooring at a virtual pier and support for our colleagues from RWTH Aachen University in calibrating their LIDAR sensors. Guests were also able to test the joystick control themselves. It was a special honour for us to show Captain Quandt and the crew the Denny Medal, which we won for a paper on experimental results on their ship. They have made an indispensable contribution to the progress made in the development of automatic functions in shipping.



22nd European Control Conference - ECC2024
The 22nd European Control Conference - ECC2024 took place in Stockholm at the Royal Institute of Technology (KTH) from 25-28 July. With 1100 participants from all over the world, it was the largest ECC to date. Many of the presentations focussed on control theory, but specific plenary lectures and sessions were also held to address the practical application of control technology in industry. Agnes Schubert from the Institute of Automation Technology presented a paper on the influence of wind on the energy consumption of ships. In addition to the conference, information was gathered on assisted and automated driving in shipping in Sweden.
Translated with DeepL.com (free version)


Vortrag und Workshop zum Thema Modellbildung und Simulation technischer Systeme mit MapleSim
On Monday, 24 June 2024, Dr René Noack, Senior Application Engineer at Maplesoft™, was a guest at the Institute of Automation Technology. Maplesoft™, based in Waterloo, ON Canada, is a subsidiary of Cybernet Systems Co., Ltd. in Japan and one of the leading suppliers of high-performance software tools for engineering, science and maths.
Dr. Noack gave the students and staff present at the IAT an insight into the latest possibilities of MapleSim, a software for the simulation of multi-body systems, to support users in the early design phase through to the optimisation of system performance. MapleSim enables a holistic view of different disciplines, such as hydraulics, mechanics and electronics.
As part of the subsequent workshop, temporary student licences were made available so that each participant could get to grips with MapleSim individually.
A-SWARM II - Autonomous electric shipping on waterways in metropolitan regions II

On 28 June 2024, the kick-off meeting for the research project A-SWARM II - Autonomous electric shipping on waterways in metropolitan regions II (funding code 03SX593A) took place at Berliner Hafen- und Lagerhausgesellschaft mbH (BEHALA) in Berlin's Westhafen.
The project, which is funded by the German Federal Ministry for Economic Affairs and Climate Protection, follows on from the A-SWARM research project (funding reference 03SX485A) and deals with the next step towards a new type of integrated transport system on inland waterways.
The consortium leader of the highly innovative team is Schiffbau-Versuchsanstalt Potsdam GmbH. The team includes Berliner Hafen- und Lagerhausgesellschaft mbH (BEHALA), the DHL Group, the Department of Design and Operation of Maritime Systems at the Technical University of Berlin, the Institute of Automation Technology at the University of Rostock and Veinland GmbH.
The Federal Ministry for Economic Affairs and Climate Protection is providing the funding as part of the Maritime Research Strategy 2025 and the project is being supervised by Project Management Jülich (PTJ).
Symposium E2MUT
As part of the RUBIN project E2MUT - Emission-free electromobility for maritime transport, the symposium "E-mobility on the water - Symposium on emission-free maritime transport concepts" took place from 11 to 12 June 2024. In addition to representatives of the project partners, there were numerous guests from politics and business, shipping companies and similar projects. Results were presented and perspectives for cleaner and more efficient shipping were outlined. The presentation by Agnes Schubert from the IAT focussed on how assistance and automation functions can help to make ship operations more energy-efficient.


ModularShipAssist - ModularShipAssist - Autonomously and cooperatively operating modules for commanded ship assistance in harbours
In week 23, a joint trial took place as part of the ModularShipAssist research project with the project partners J.M. Voith SE & Co. KG | VTA and the Institute for Fluid Dynamics and Ship Theory at Hamburg University of Technology at the Hamburg Shipbuilding Research Centre (HSVA) in Hamburg-Barmbek-Nord.
The ModularShipAssist research project, funded under the Innovative Port Technologies II funding guideline of the
Federal Ministry of Transport and Digital Infrastructure, aims to develop an autonomous, modular assistance system consisting of a variable number of electrically powered push and tug modules and a mobile command centre.
During testing, the focus was on installing all components in and commissioning the test vehicle. For this purpose, communication tests, the calibration and transformation of the camera measurement system for position measurement as well as numerous test and reference runs with the model of the VWT tug were carried out.
Figure 1 VWT in the water



Presentation at IFAC Safeprocess 2024 in Ferrara, Italy
From 4-7 June 2024, the 12th IFAC Symposium on Fault Detection, Supervision and Safety for Technical Processes took place in Ferrara, a city in the Italian region of Emilia-Romagna in northern Italy.
The Chair of Control Engineering was successfully represented by Assoc. Prof. Reza Shanazi. He presented the paper ESO-Based Fault-Tolerant Funnel Heading Control of Surface Vessels in the Invited Session: Fault Diagnosis and Fault Tolerant Control for Safety of Marine Systems.


Visit from the Universidad del Cauca
On Tuesday 4 June 2024, a 12-strong delegation from the Department of Electronics, Instrumentation, and Control of the Faculty of Electronic and Telecommunications Engineering at the University of Cauca, Colombia, visited the Control Engineering Application Centre. 11 students and Professor Andrés Fernándo Ordoñez Hurtado learned about the research activities of the Chair of Control Engineering. Dr Rudy Cepeda Gomez welcomed the guests in the local language. After an introduction to the Institute of Automation Technology, four selected research projects were presented. The questions that arose were answered in discussions with staff and students during the tour and the demonstration in the Control Engineering Application Centre.






ModularShipAssist - Autonomously and cooperatively operating modules for commanded ship assistance in harbours
The ModularShipAssist research project involves the development of an autonomous, modular assistance system consisting of
a variable number of electrically driven tug modules. The first developed models of the assistance modules were produced by the company Möbius Modell- und Formenbau and delivered to the Institute of Automation Technology on Monday 27 May. The drive system, including the control and regulation system, will be integrated over the next few weeks. The capabilities of the developed assistance system will then be demonstrated on a model scale under real conditions in a harbour.
Further information on the ModularShipAssist research project:
Translated with DeepL.com (free version)



Visit of the graduating class 85 to the Control Engineering Application Centre

On Saturday 18 May 2025, a seminar group from the graduating class 85 of the former Technical Electronics Section of the University of Rostock visited the Control Engineering Application Centre (AZR) in Tannenweg.
Prof Dr sc. techn. Karl Hormann was the section director at the time (1974-1986) and held the Chair of Control Engineering. He was supported in teaching and research in control engineering by the then senior assistant Dr Lutz Mohr and the assistants Dr Ralf Friedrich, Dr Adolf Gienapp and Dr Bernhard Lampe.
Sven Lack, research assistant at the Chair of Control Engineering, welcomed the graduates to the AZR. He gave an overview of the Faculty of Computer Science and Electrical Engineering and the Institute of Automation Technology in a presentation. A guided tour and a presentation of current research projects rounded off the visit.
Vorträge OCEANS 2024 SINGAPORE 14. bis 18. April 2024

Title: Generalized Approach for Modeling and Control of Structurally Variable Underwater Vehicles (#568)
Session name: Autonomous Underwater Vehicles
Date / Time: 18.04.2024 - 10:50 - 12:30
Location: Marina Bay Sands Level 4, Roselle 4611
Presenting Author: Martin Kurowski
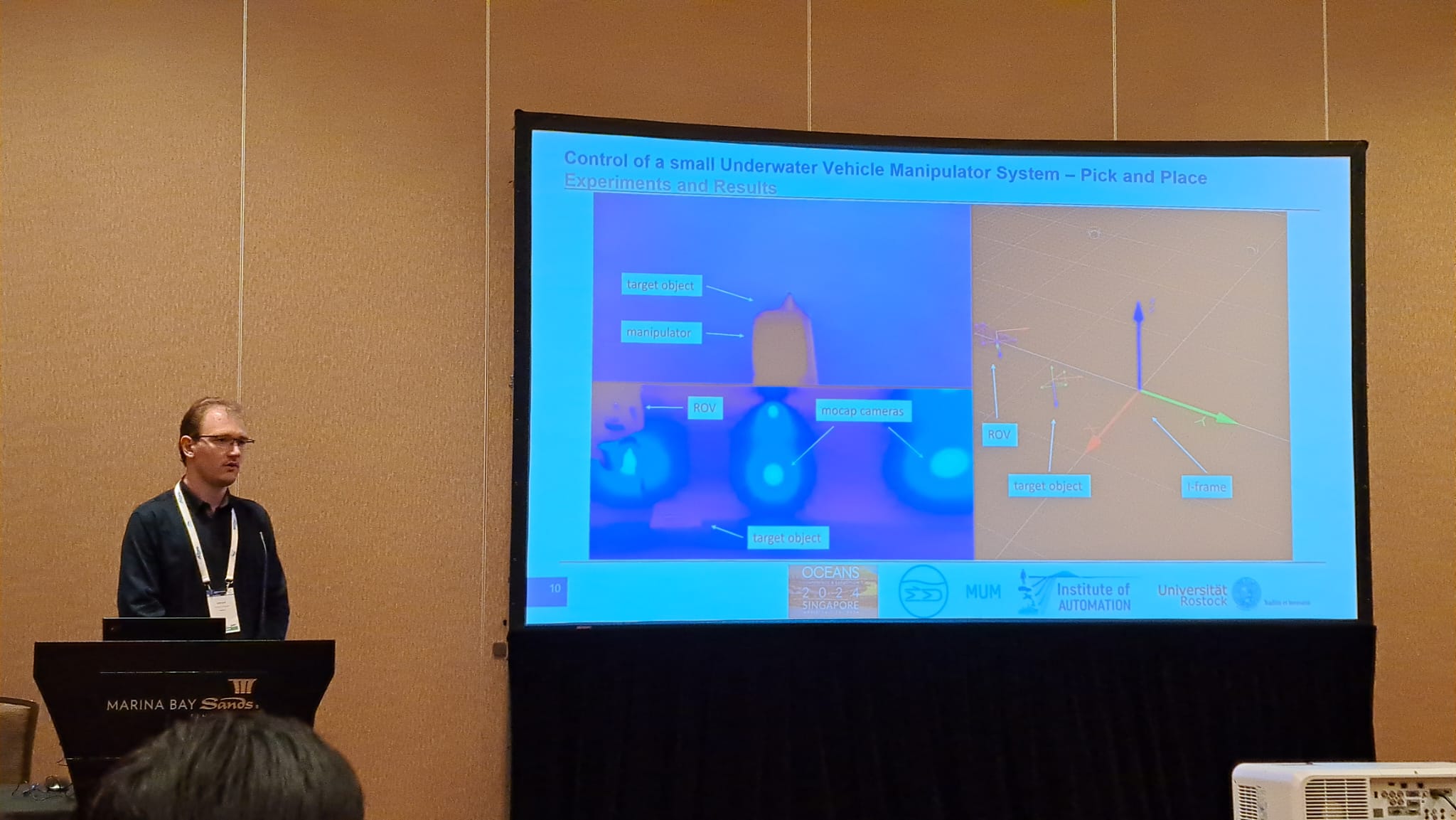
Title: Control of a small Underwater Vehicle Manipulator System - a highly automated Pick and Place Experiment (#685)
Session name: Remotely Operated Vehicles
Date / Time: 16.04.2024 - 15:30 - 17:30
Location: Marina Bay Sands Level 4, Roselle 4612
Presenting Author: Sven Lack

Title: Predictive Disturbance Rejection Method to Control Vessels in Presence of Currents and Wind (#578)
Session name: Vehicle Navigation
Date / Time: 17.04.2024 - 10:50 - 12:30
Location: Marina Bay Sands Level 4, Roselle 4612
Presenting Author: Johannes Marx
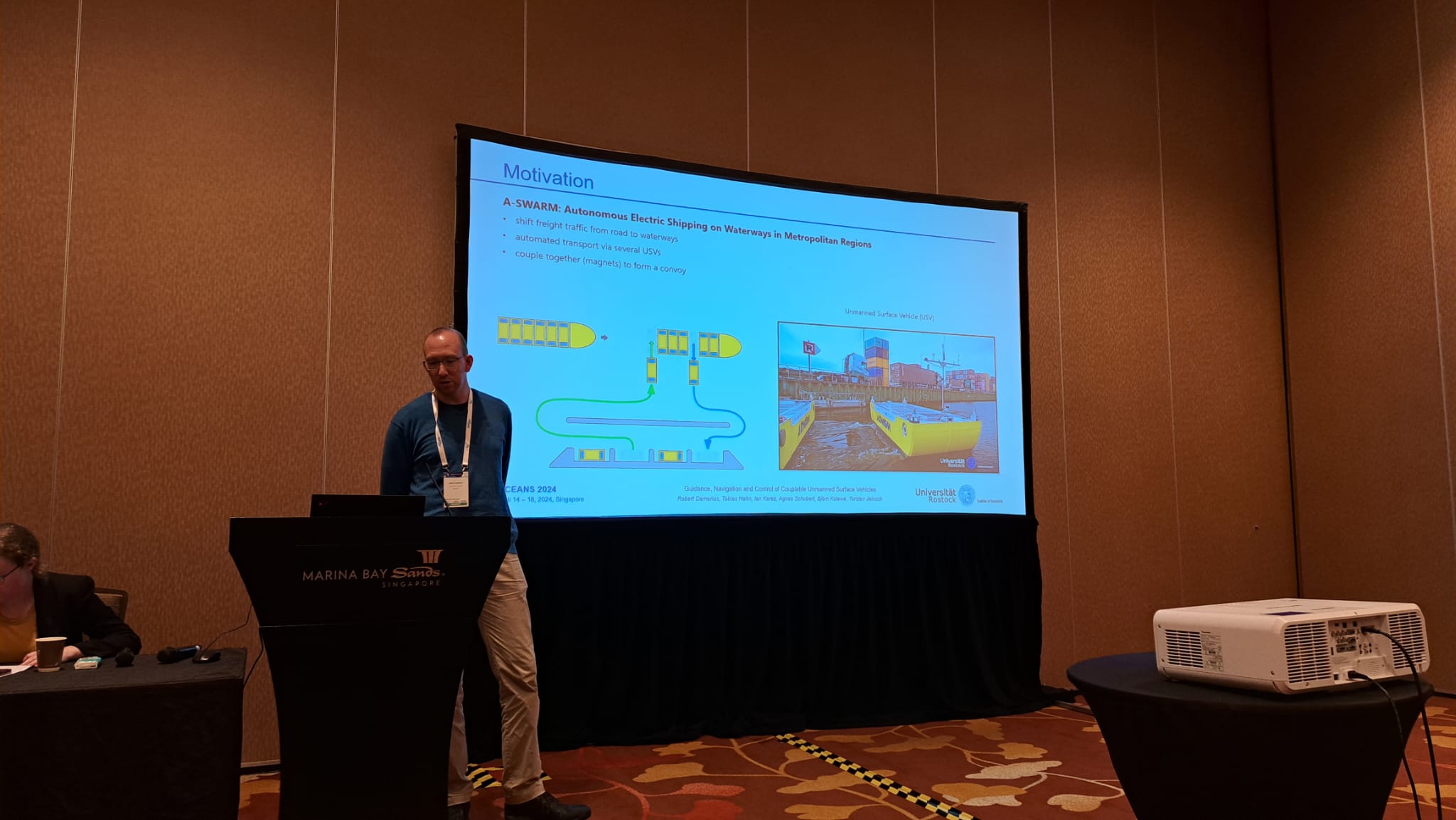
Title: Guidance, Navigation and Control of Couplable Unmanned Surface Vehicles (#314)
Session name: SST-6: Navigation and Situational Awareness for Autonomous Ships; SST-03: Ballast Water Management and Hull Cleaning Regulations
Date / Time: 17.04.2024 - 15:50 - 17:30
Location: Marina Bay Sands Level 4, Simpor 4812
Presenting Author: Robert Damerius

Title: Comparison of Performance in Assisted and Automatic Berthing Maneuvers with the Research Vessel DENEB (#313)
Session name: Vehicle Performance
Date / Time: 18.04.2024 - 15:50 - 17:30
Location: Marina Bay Sands Level 4, Roselle 4611
Presenting Author: Agnes Schubert

Wissenschaftlerteam der Universität Rostock und der Hochschule Wismar gewinnt Denny Medal 2024

The Denny Medal for the publication of the best article in the Journal of Marine Engineering & Technology (Taylor & Francis Group) goes to Rostock Warnemünde this year. The authors of the article "Consumption-reduced manual and automatic manoeuvring with conventional vessels" from the Institute of Automation Technology at the University of Rostock and the Department of Maritime Engineering at Wismar University of Applied Sciences published results from the joint research project GALILEOnautic and GALILEOnautic 2.
This award is presented annually for the best paper published in each of the technical journals of IMarEST (Institute of Marine Engineering, Science & Technology, England & Wales). The article received the award both for its originality of content as an account of recent and pioneering developments in the maritime industry and for its technically accurate quality.
The article examines how fuel consumption can be reduced when manoeuvring ships. The focus is on conventional ships, which are equipped with conventional propulsion technology and currently make up the majority of the global fleet. The developments focus on supporting the officers in manoeuvring the ship. Assistance systems are used to find the best possible strategy for carrying out a manoeuvre from A to B efficiently and safely under the current weather conditions. The measured values of all ship processes, which are also displayed on the bridge, are taken into account. As with a navigation system for cars, the skipper can follow the completed plan with manual steering or the manoeuvre is executed automatically by the captain switching to the automation system, which then guides the ship. In the assistance system, the officer on watch can monitor whether the plan is being adhered to. The approach takes account of the growing shortage of skilled workers in the maritime sector on the one hand and the need to reduce energy consumption and emissions, particularly when manoeuvring close to the coast and in port, on the other.
The award-winning publication is the work of the control engineers at the University of Rostock, who developed the automation system, as well as the engineers from the ISSIMS (Institute for Innovative Ship Simulation and Maritime Systems) at Wismar University of Applied Sciences, who used their nautical expertise to design and build the assistance system. Without the close cooperation between the two institutions, this innovative solution for cleaner and forward-looking shipping would not have been possible. The team of scientists also had and still has the opportunity to test and optimise the developments under real conditions. Thankfully, the Federal Maritime and Hydrographic Agency (BSH) and the crew of the 52-metre-long survey, wreck search and research vessel DENEB have made the practical work possible, for which the scientists are very grateful to both the BSH and the crew.
The award will be presented during a gala dinner on 25 April 2024 in London. The keynote speaker will be actor Mark Williams.
Kontakt:
Dr.-Ing. Agnes Schubert
Universität Rostock
Institut für Automatisierungstechnik
Tel.: +49 381 498-7728
agnes.schubert@uni-rostock.de


Visit to the MSCW in Warnemünde with students on the Maritime Systems course
On 24 January 2024, the students once again had the chance to prove themselves as "captains" on a long voyage as part of the Maritime Systems course.
We went to the MSCW ship handling simulator in Warnemünde, where everyone was able to take the helm of a 200-metre freighter. The course and track regulations for ships used in shipping were also examined and tested in rough seas.
Once again, we would like to thank the MSCW team, especially Cathleen and Holger Korte, for their nautical explanations and the fantastic tour of the simulator.



Open day at the Control Engineering
Once again this year, the Chair of Control Engineering hosted its traditional annual open day at the Application Center.
On Monday, 18.12.2023, several partners and students from all semesters of the Bachelor's and Master's degree courses in Computer Science and Electrical Engineering accepted the invitation.
The autonomous and remote-controlled surface and underwater vehicles, ground effect vehicles, rovers and drones could be viewed and tried out. The laser scanner could be experienced while measuring and the skill on the bicycle with rear wheel steering was put to the test. Technical questions could be asked and insights into the work of the Chair of Control Engineering could be gained.
We are already looking forward to the 2024 open day.



Oceans 2023 Gulf Coast Biloxi Mississippi


This year, from September 25 to 28, Oceans took place in Biloxi, Mississippi, in the United States of America. The Oceans conference is aimed at professionals from around the world who want to exchange ideas and take a leadership role in the protection and use of the world's greatest natural resource - our oceans.
Fittingly, our chair was represented by a staff member with connections to the Ocean Technology Campus Rostock, Jonas Pabst.
Jonas Pabst presented a paper entitled "A contribution to the navigation of an underwater glider with passively adapting flapping wings using sensor fusion and a motion model "and was able to learn about current trends in the plenary discussion of the UG2 underwater glider group. In the exhibition hall, manufacturers and users presented their systems and were available to answer questions about them if needed.
The interdisciplinary approach of Oceans also helped to exchange ideas on use cases as well as opportunities and risks of unmanned underwater vehicles outside of one's own research focus. In addition to the technical highlights, the visit by NASA astronaut Fred Haise during the gala dinner probably also represented a memorable moment.
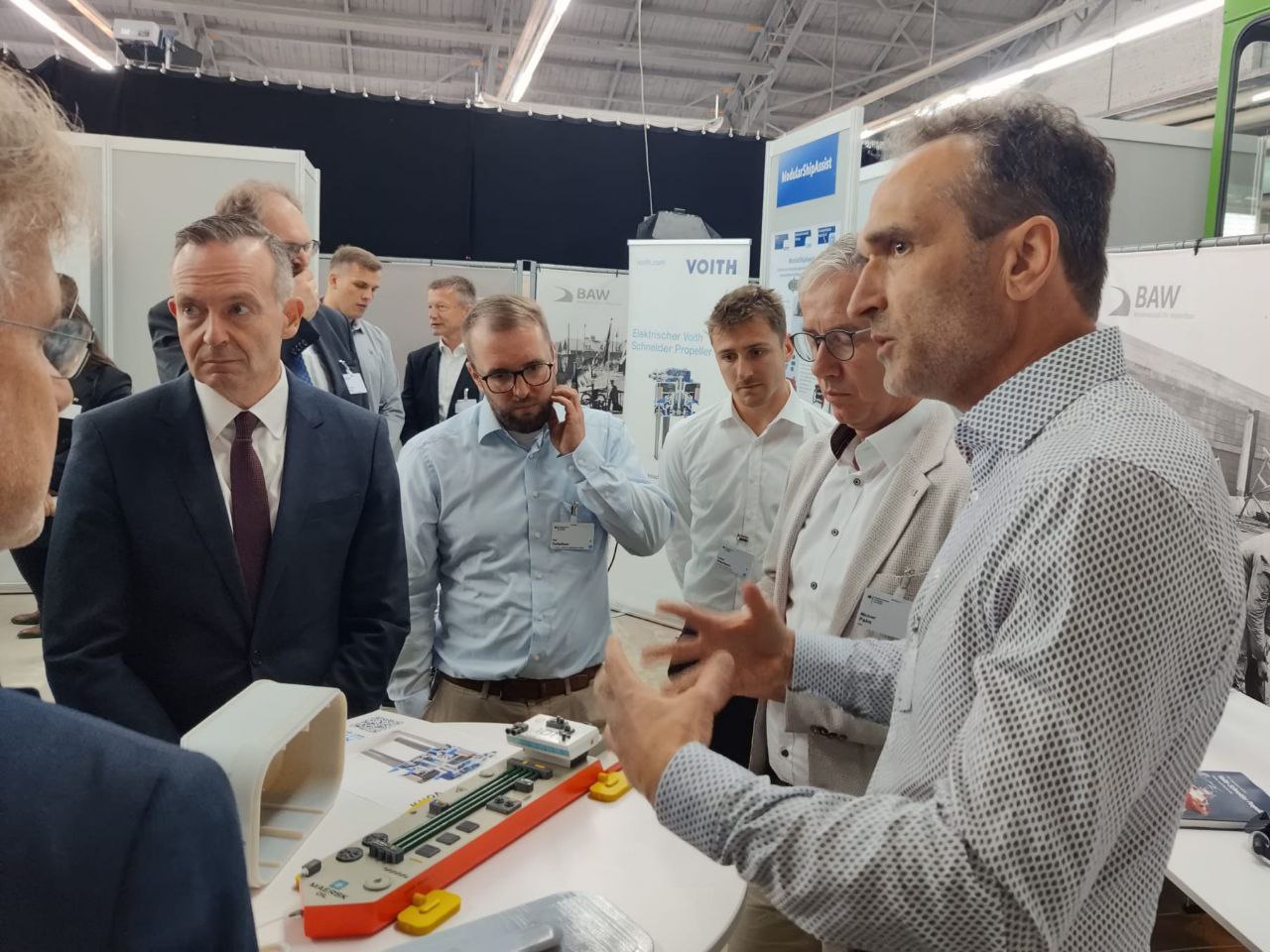
Federal Minister Volker Wissing finds out about research project on cooperative control of multi-vehicle systems

At the specialist conference "New Technologies and Test Fields for Waterways and Ports", which took place in Karlsruhe at the beginning of October, Dr.-Ing. Björn Kolewe from the Chair of Control Engineering at the University of Rostock and Leon Tietz from Berliner Hafen- und Lagerhausgesellschaft mbH (BEHALA) presented current research results on maritime technologies in ports and on waterways.
In a joint presentation, the researchers presented the vision "From seaport to doorstep - autonomous goods transport by water" with current results from the ModularShipAssist, DigitalSOW, SensorSOW and DigiLoeWe research projects. On the second day of the conference, the Federal Minister for Digital Affairs and Transport, Dr Volker Wissing, visited the exhibition stand of the ModularShipAssist joint project. Representatives of the project consortium, which includes the company Voith, the Technical University of Hamburg and the University of Rostock, demonstrated initial research results on cooperative control of multi-vehicle systems.
The aim of the conference was to present and discuss results from the funding programmes "Innovative Port Technologies (IHATEC)", "Digital Test Fields Ports (DigiTest)" and "Digital Test Fields Waterways (DTW)", which are supported by the Federal Ministry of Digital Affairs and Transport, in order to jointly shape the future of waterways and ports.


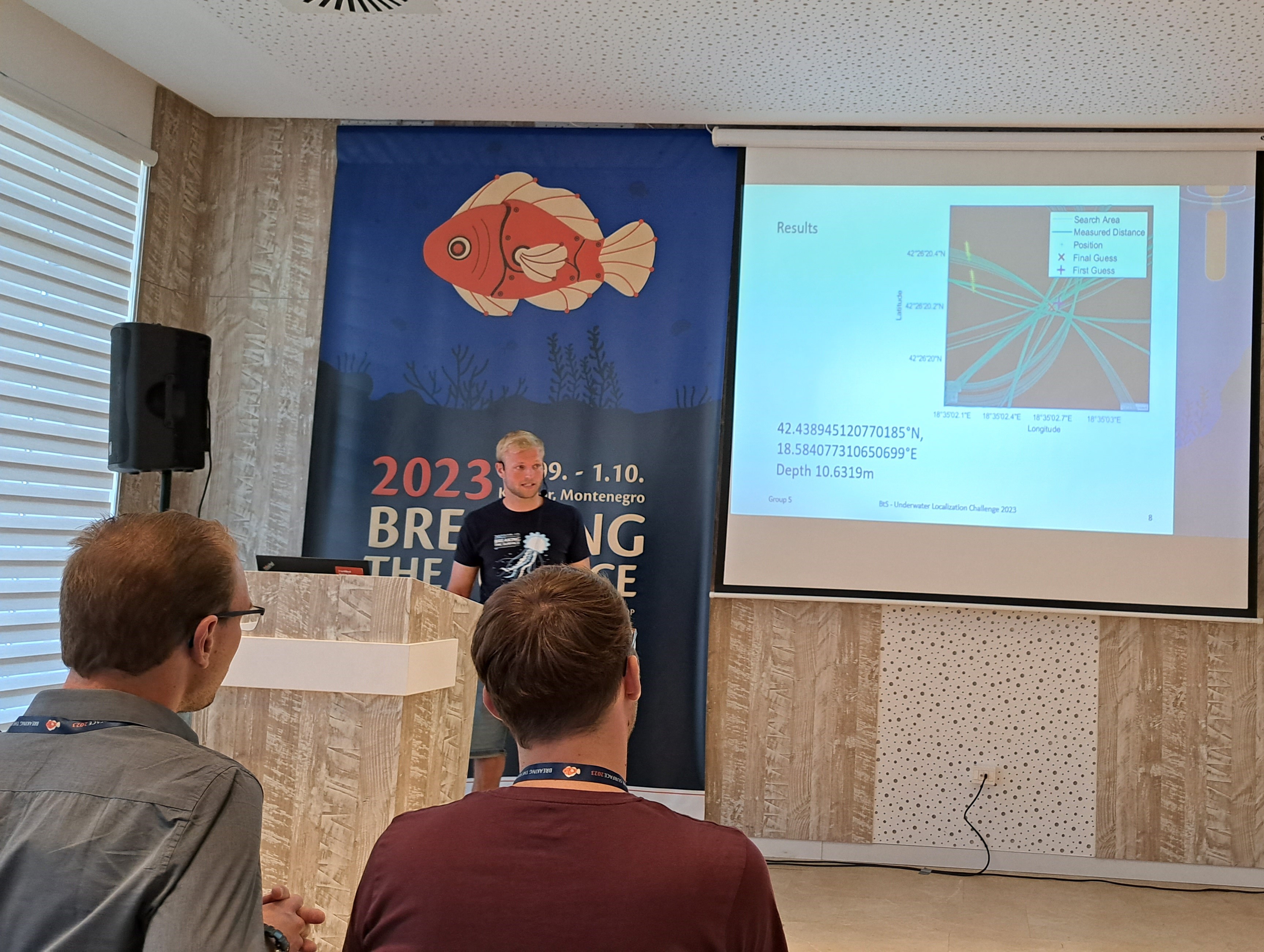
Underwater Localization Challenge BTS2023
Oops! … They did it again. A team from the Chair of Control Engineering wins the International Underwater Localization Challenge for the 2nd time.
An international team from Australia and Rostock with Dr. Sarah Jane Pell, Contemporary artist, commercial diver, researcher, and explorer of new worlds, and the PhD students M.Eng. Sven Lack, M.Sc. Johannes Marx, M.Sc. Ian Karez from the Chair of Control Engineering at the University of Rostock won the International Underwater Localization Challenge during the 15th International Interdisciplinary Field Workshop of Maritime Robotics and Applications - Breaking the Surface 2023 in Kumbor, Montenegro.
Congratulations!





Visit to MARIN in Holland
In mid-September 2023, one of the three pilot demonstrations of the EU project MOSES took place in Wageningen (NL) with representatives of the international consortium. Agnes Schubert and Robert Damerius from the Chair of Control Engineering were there, following an invitation from Bas de Kruif from MARIN (Maritime Research Institute Netherlands). This pilot demo was entitled 'Autonomous Sailing of an Innovative Container Feeder Vessel, making a Roundtrip Between Two Ports'. Autonomous operations with the 1:17 model of the container vessel (model length 4.5 m) were demonstrated in MARIN's largest basin (40 m x 170 m), with swell generated as a disturbance. The round trip on a waypoint route marked with small buoys began with automatic casting off in Dynamic Positioning mode. Afterwards, a speed of 9 kn was built up for the transit, with the sledge, on which the technical equipment is installed and also the spectators were seated, following the model ship. At the end of the track, the ship was automatically docked again. MARIN is equipped with numerous si-mulators and test basins and therefore offers a wide range of possibilities for control engineering tests. The next morning was used for a mainly control-oriented meeting in which the control engineers of MARIN and the representatives of the Chair of Control Engineering exchanged their experiences with maritime automation.

MED23 - Mediterranean Conference on Control and Automation 2023
The 31st Mediterranean Conference on Control and Automation took place this year in Limassol, Cyprus. From 26 June to 29 June, the conference presented and discussed exciting topics and current research foci in the field of automation and control technology.
The conference offered the international audience of about 200 aspiring scientists* the opportunity for professional exchange and making new contacts. The Chair of Control Engineering was represented there by Sven Lack and Johannes Marx. Both presented the results of their current research:
Sven Lack, Erik Rentzow, Torsten Jeinsch: "Modelling and Workspace Analysis for an Underwater Manipulator".
Johannes R. Marx, Robert Damerius, Torsten Jeinsch: "Linearized Model Predictive Control with Offset-Freeness for Trajectory Tracking on Inland Vessels".



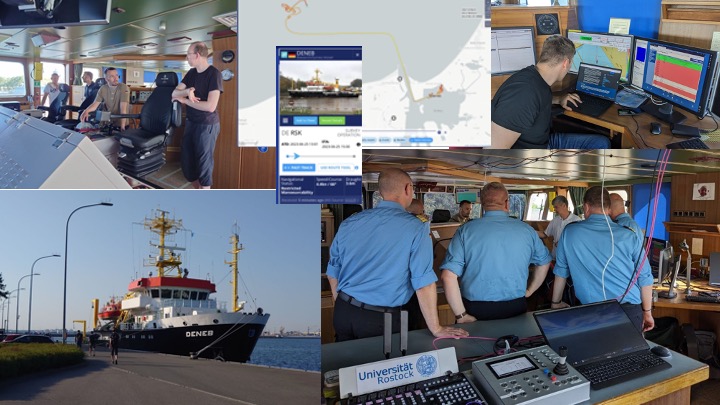
Research activities GN2plus - Automation of research vessel DENEB
Over the past weekend, intensive experimentation and testing took place on the research vessel DENEB. The team from the University of Rostock focused their research on model-based actuator allocation experiments, drift tests, and trials to investigate of the impact of wind in automatic mode.
Starting today, automated transit maneuvers at different speeds and automated berthing maneuvers are on the agenda. The weather, with emerging gusty winds, gives a challenging task for the automation solutions developed by the University of Rostock and the entire crew of DENEB.
We are immensely grateful to the Federal Maritime and Hydrographic Agency and the entire crew of the research vessel DENEB for their exceptional support in facilitating our studies and experiments on board. They greatly assist in realizing the occasional unconventional research ideas of the control engineers on board with their professional expertise.
At this point, I would like to provide a brief preview of the upcoming 22nd International Federation of Automatic Control World Congress 2023 in Yokohama. In the TuC10.3 session titled "Autonomous Underwater and Surface Vehicles," we will present the latest results from the GN2plus research project and the ongoing testing campaign in our paper titled "Assistance-based automation of berthing maneuvers."
The work was funded by the German Federal Ministry of Economic Affairs and Climate Action (BMWK) and supported by the DLR Space Administration under the registration number FKZ 50NA2304B.

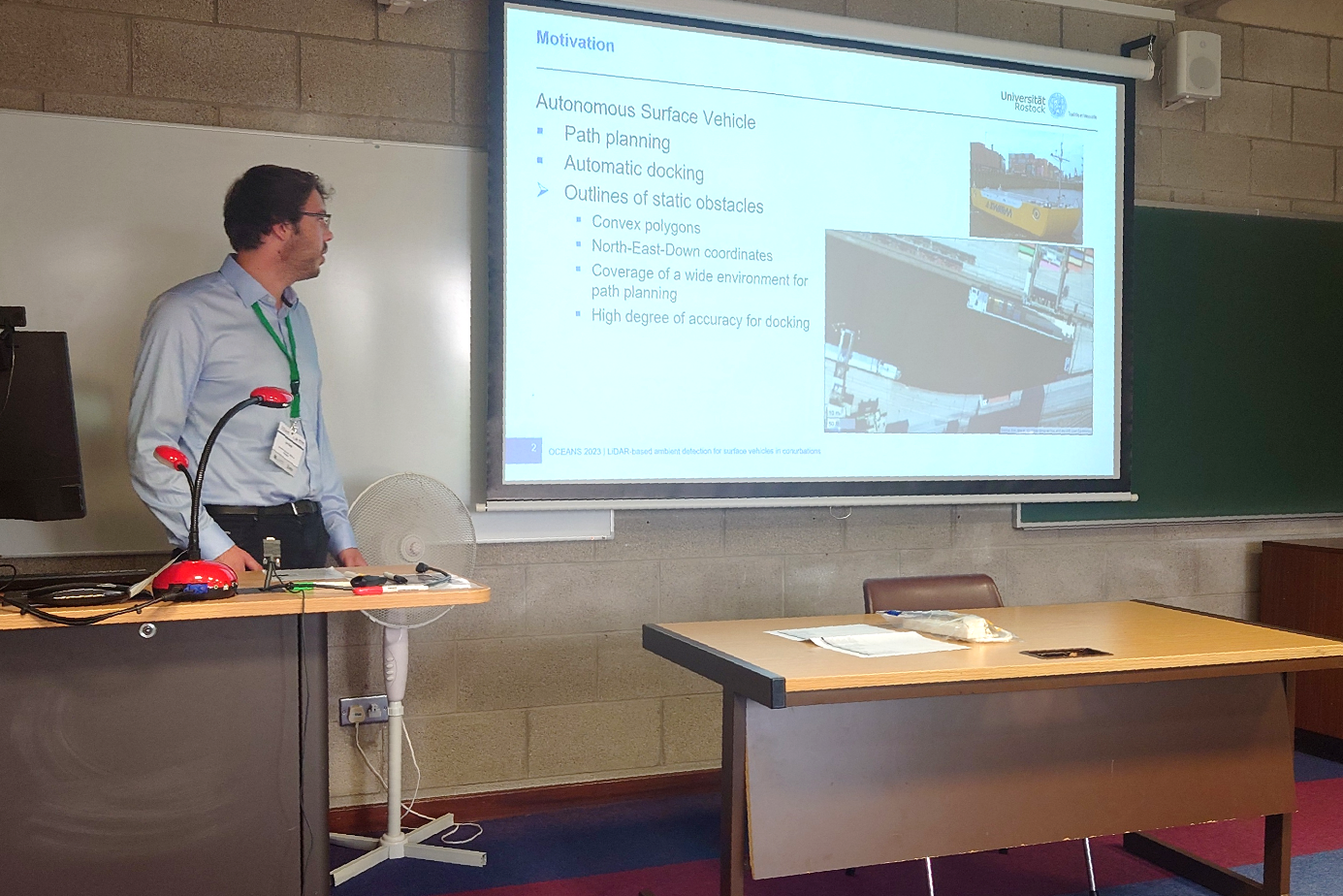
OCEANS 2023
Two colleagues from our institute participated in OCEANS 2023 - Blue Oceans Planet Earth in Limerick, Ireland with our presentations. Ian Karez presented his results on the use of lidar sensor technology for unmanned vehicles in the maritime sector. Agnes Schubert spoke about the system requirements for automatic manoeuvring of water vehicles from the cross-project experiences of our chair. A special highlight was the results of the automatic mooring manoeuvre with the 52m long research vessel DENEB in cooperation with the BSH in Rostock. The conference is organised by the IEEE Oceanic Engineering Society and the Marine Technology Society every year and provides a broad platform to exchange ideas in maritime engineering. Since the chairman of the local organising committee, Daniel Toal, is himself a control engineer, this branch was much more strongly represented than usual. Therefore, we met many national and international project partners. The picture shows the representatives from the University of Rostock and the TU Berlin. Through the audience in our sessions, new connections have been made in the Netherlands and the USA.


Joint Symposium 2023 of the University Medical Center Rostock and the Faculty of Computer Science and Electrical Engineering
Joint Symposium 2023 of the University Medical Center Rostock and the Faculty of Computer Science and Electrical Engineering
On Friday, 9 June 2023, a joint symposium of the University Medical Center Rostock and the Faculty of Electrical Engineering and Computer Science took place in the Konrad-Zuse-Haus of the Faculty of Computer Science and Electrical Engineering.
The symposium was jointly organised by the Dean of the University Medicine, Prof. Dr. med. univ. Emil C. Reisinger, and the Dean of the Faculty of Electrical Engineering and Computer Science, Prof. Dr.-Ing. habil. Mathias Nowottnick, opened the conference. Two sessions with a total of 18 keynote speeches and three workshops on the topics of digitalisation, technology and automation as well as artificial intelligence offered participants plenty of space for professional exchange and lively discussions.


University Information Day University of Rostock 3 June 2023
On 3 June, the University of Rostock held its University Information Day. The Chair of Control Engineering participated with a lecture and 2 exhibits at the well-attended event in the new electrical engineering building on the Südstadt campus.
Our chair presented itself with 2 vehicles:
- Mecanum wheel vehicle with lidar - Automatic vehicle guidance in unknown environments is a major challenge, especially for indoor applications. Using a Mecanumwheel vehicle, this task is solved in an exemplary way through simultaneous mapping and localisation, as well as path planning based on this.
- ROV (remotely operated underwater vehicle) - A composite system consisting of a small underwater vehicle and a robot arm will be exhibited. It is used in research for the investigation and technical compensation of coupling forces during manipulation tasks in underwater areas.



Synergy meeting of the DLR Explorer initiatives STE2023-I
The synergy meeting of the DLR Explorer initiatives STE2023-I took place in Bremen from 24-26 May 2023.
The conference focused on the exchange between projects, especially in the areas of sensors, hardware, autonomy and AI.
The Chair of Control Engineering presented the new project GALILEOnautic 2+ in a lecture and a poster.
The DIGITAL HUB Industry Bremen provided the perfect setting for our event, which was jointly hosted by the University of Bremen, the German Aerospace Center and TOPAS Industriemathematik.


DIVING INTO THE FUTURE - Rostock Perspectives on Maritime Technologies

On Thursday, 25 May 2023 at 6 p.m., the University of Rostock and the Hanseatic and University City of Rostock jointly invited to the event
DIVING INTO THE FUTURE - Rostock's perspectives on maritime technologies in Rostock's town hall.
It was the kick-off event for the second season of the discussion series UNIVERSITY AT THE TOWN HALL. It was organised by the Interdisciplinary Faculty at the University together with the Hanseatic and University City of Rostock.
In addition to experts from the departments of marine technology and shipbuilding at the University of Rostock, the possibilities, limits and challenges of maritime technologies will also be considered from the perspective of control engineering.
Nähere Informationen: https://www.inf.uni-rostock.de/inf/universitaet-rathaus/
Internationaler interdisziplinärer PhD-Workshop 2023 und 9. Internationales Symposium über automatische Steuerung 2023

The International Interdisciplinary PhD Workshop (I²PhDW) together with the International Symposium on Automatic Control (AUTSYM) took place at Wismar University of Applied Sciences from 03-05 May 2023.
Two members of the Control Engineering Department took part in the event and presented their research results to the international audience.
In his lecture, Nick Eisenblätter presented his "Adjustment procedure for volume flows for minidialysis" as part of research into new therapy procedures based on extracorporeal blood purification using dialysers at the Fraunhofer Institute for Cell Therapy and Immunology Rostock.
Carsten Rethfeldt published current results from the joint project "MUM2" (www.mum-project.de) in the paper "Optimisation-based Actuator Allocation for Underwater Vehicles with Variable Buoyancy Systems". The paper was awarded the Best Paper Award of the symposium.
- Nick Eisenblätter, Sven Lack, Horst Krüsemann, Jacqueline Hofrichter, Torsten Jeinsch: "Adjustment procedure for volume flows for minidialysis".
- Carsten Rethfeldt, Sven Lack, Torsten Jeinsch: "Optimisation-based Actuator Allocation for Underwater Vehicles with Variable Buoyancy Systems".


MAROS 2023 - from Thuringia to the world's oceans
On 27 and 28 April, the MAROS 2023 (Maritime Robotics and Sensor Technology) conference took place under the umbrella of the Gesellschaft für Maritime Technik (GMT) and the Fraunhofer IOSB-AST in the representation of the Free State of Thuringia to the Federal Government in Berlin. Participants from business, politics, administration and science had an intensive exchange on a wide range of topics in maritime technology, also in connection with automotive. Representatives of the Chair of Control Engineering discussed future-oriented systems engineering solutions for complex, dynamic and time-variant processes in the fields of energy supply and underwater robotics with numerous participants. The focus was on the development of underwater vehicles and robots for exploration and for inspection and manipulation tasks on underwater infrastructures.
Image1: Source: Fraunhofer IOSB-AST: Federal Ministry for Economic Affairs and Climate Protection, Dieter Janecek, Federal Government Coordinator for Maritime Affairs and Tourism
Figure2: Source: Fraunhofer IOSB-AST, (from left to right):
1) Fraunhofer Institute for Digital Media Technology IDMT, Christoph Sladeczek, Head of Virtual Acoustics.
2) terra.blue, Dr. Walter L. Kuehnlein, Managing Advisor for Energy & Tech, Speaker, University Lecturer
3) Thuringian Ministry for Economy, Science and Digital Society (TMWWDG), Dr. Bernd Ebersold, Head of Department for Research, Technology and Innovation
4) OFFSHORE-WINDENERGIE Foundation, Andreas Mummert, Head of Politics
5) Holger Klindt Consulting, Holger Klindt, Consultant, Head GMT Working Group Maritime Safety
6) Gesellschaft für Maritime Technik e.V., Petra Mahnke, Managing Director
7) Federal Ministry of Economics and Climate Protection, Dieter Janecek, Federal Government Coordinator for Maritime Economics and Tourism
Figure3: Source: Chair of Control Engineering, (from left to right):
Fraunhofer IOSB-AST, Dr. rer. pol. Marcel Reusch, Head of Transfer Network "Automotive goes Subsea".
Gesellschaft für Maritime Technik e.V., Petra Mahnke, Managing Director



4 May 2023 - Long Night of the Sciences in Rostock

This year's "Long Night of Science 2023 in Rostock" took place on 4 May.
The Südstadt Campus and the Stattmitte Campus cordially invited visitors to a journey into the universe of science.
Every year, the Long Night of Science offers the opportunity to meet researchers and teachers, ask them questions and look over their shoulders.
Our chair presented itself with 2 vehicles:
Mecanum wheel vehicle with Lidar - Automatic vehicle guidance in unknown environments is a major challenge, especially for indoor applications. Using a Mecanumwheel vehicle, this task is solved in an exemplary way through simultaneous mapping and localisation, as well as path planning based on this.
ROV (remotely operated underwater vehicle) - A composite system consisting of a small underwater vehicle and a robot arm will be exhibited. It is used in research for the investigation and technical compensation of coupling forces during manipulation tasks in underwater areas.
Ella (7) und Tristan (9) steuern mit einem Controller einen Unterwasserroboter und greifen mit einem Greifarm ein Objekt.
Experiments at the VWS Berlin
From 17.04. to 21.04.2023 we had the opportunity to carry out extensive tests with our partners of the MUM (www.mum-project.de) consortium at the Versuchsanstalt für Wasserbau und Schiffbau (VWS). A total of 3 ROVs and 1 AUV were involved in the tests, with the Chair of Control Engineering at the University of Rostock alone controlling 2 ROVs and the AUV.
The objectives were to determine the vehicle resistances by towing the vehicles as well as ROV manoeuvring tests and pre-tests for the automated gripping of objects.
The excellent test facilities in Berlin offer an excellent playing field for pushing the technology to its operational limits. Therefore, we would like to express our special thanks to our colleagues at the TUB, who were always on hand with help and advice during the tests and beyond.
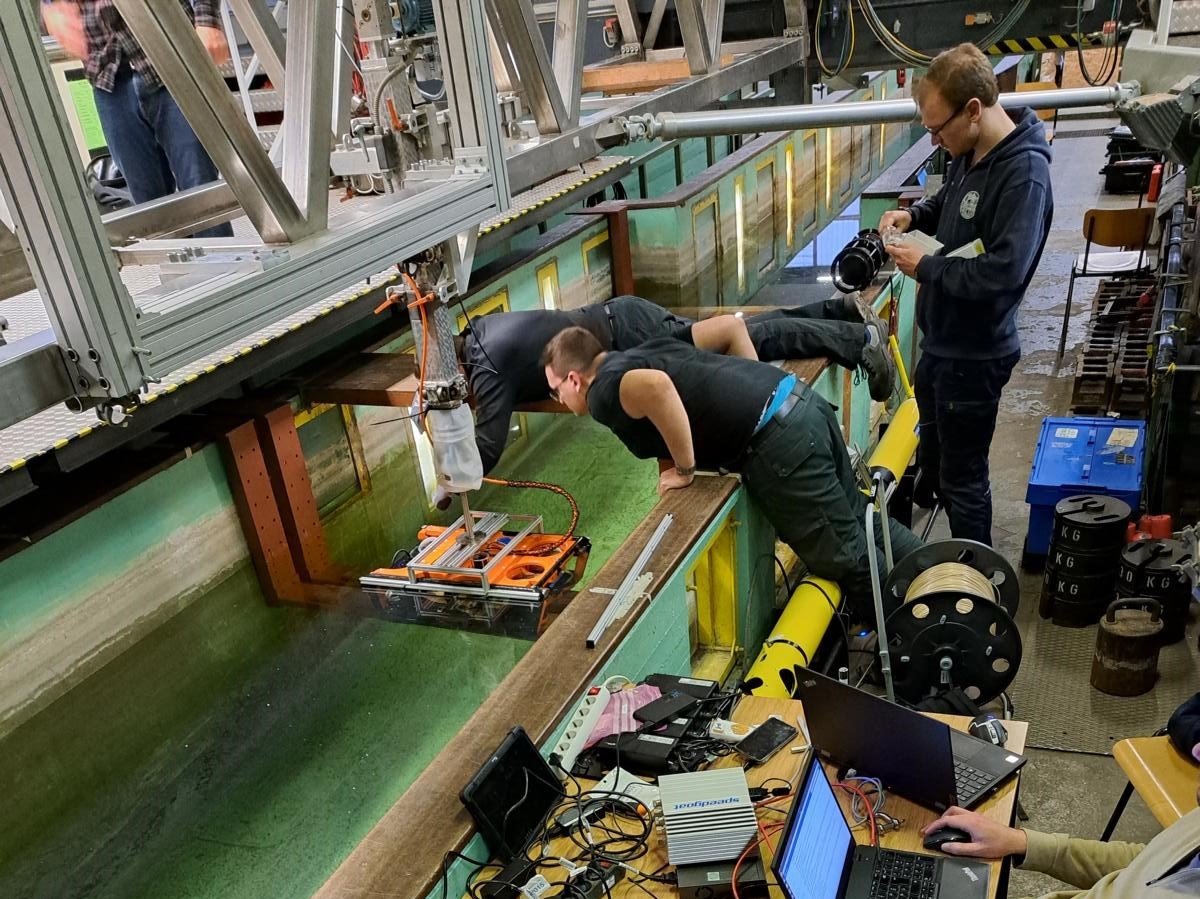
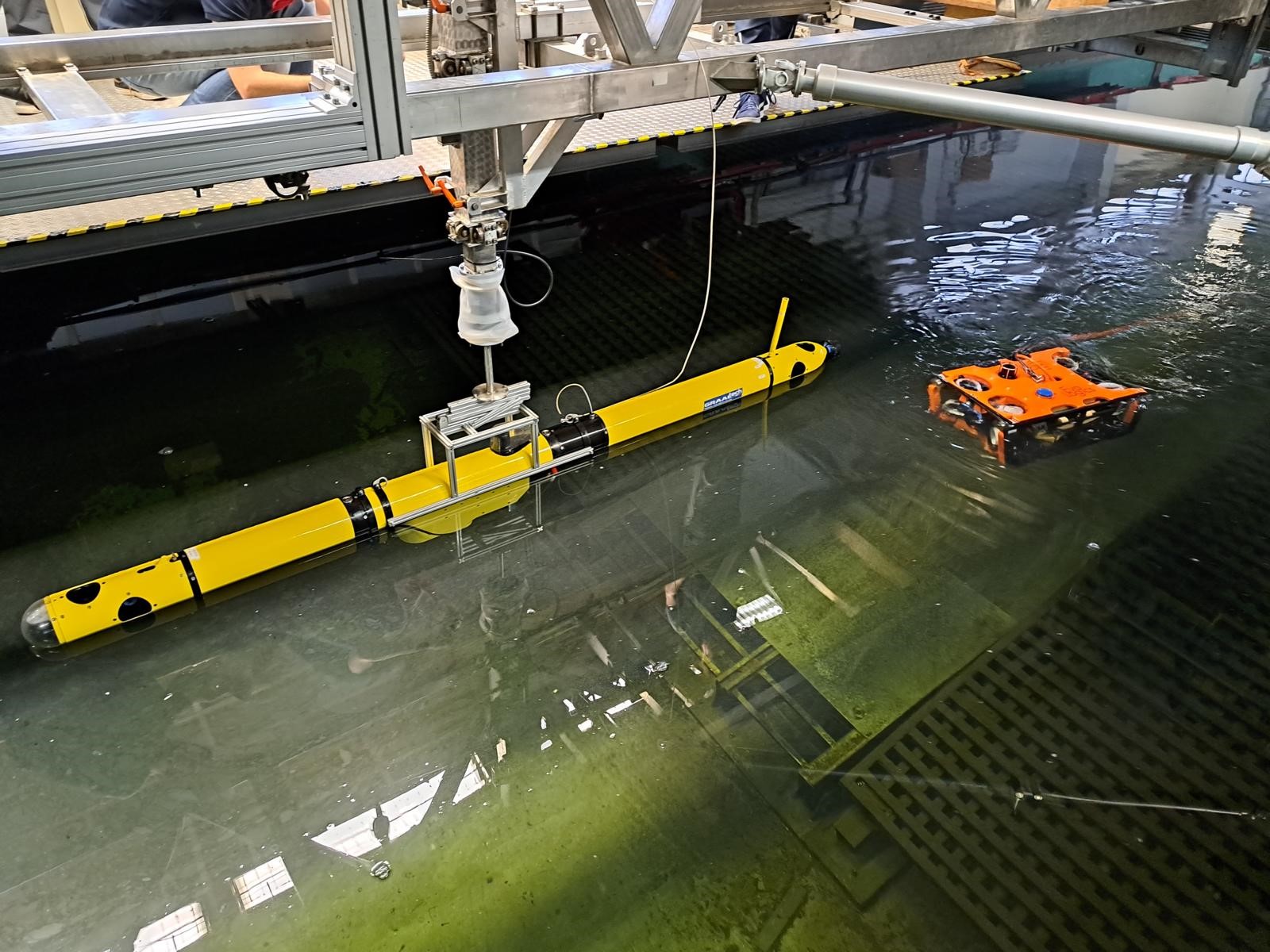
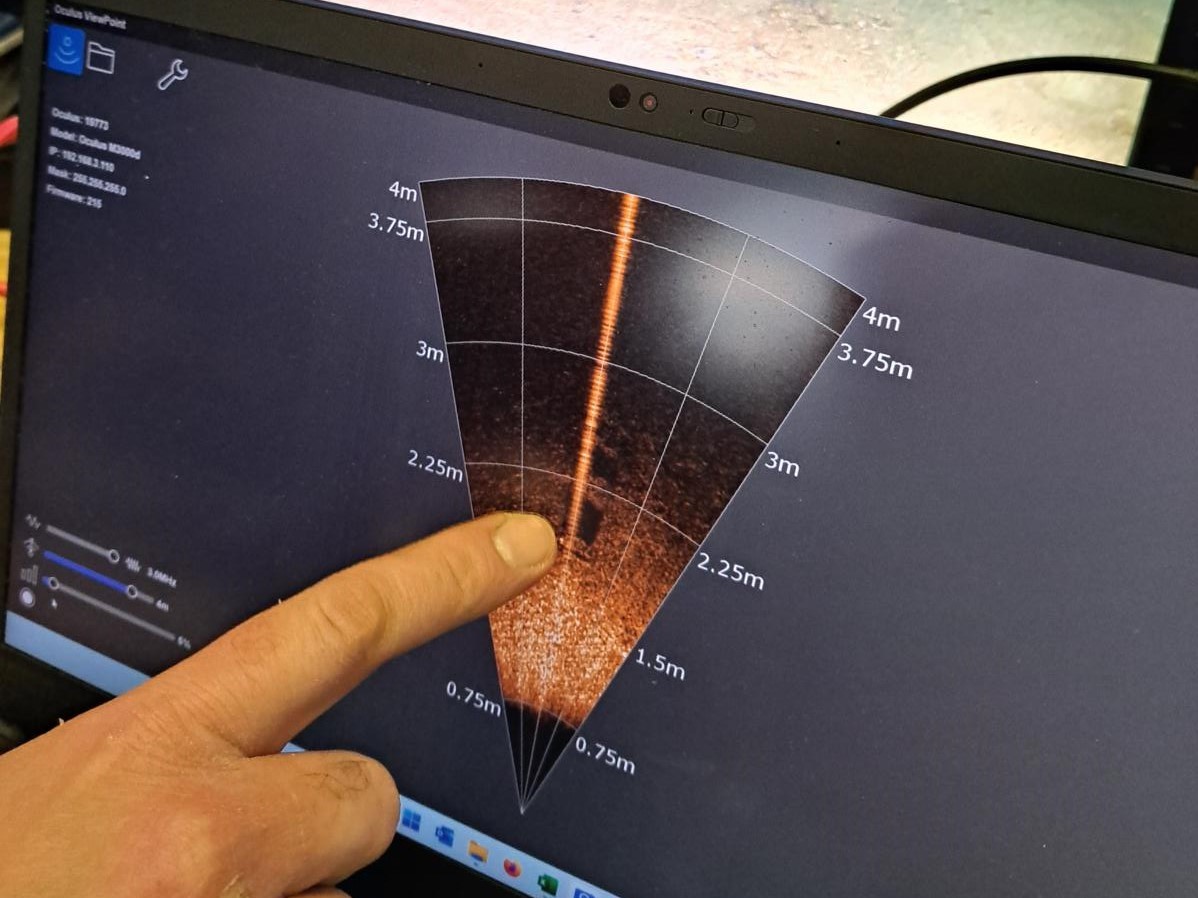

Kick-off meeting of GALILEOnautic2plus

On Thursday, 30 March 2023, the kick-off meeting for the research project "GN2plus - Networked, cooperative manoeuvring in safety-critical areas" took place.
Partners in the consortium are the Institute of Control Engineering at RWTH Aachen University and the Federal Maritime and Hydrographic Agency as an associated partner. The aim of the project is the development of modules for the construction and implementation of a networked traffic system consisting of three networked water vehicles, whereby the necessary manoeuvres in restricted, safety-critical areas are carried out automatically. The networked vehicles are to act cooperatively and be able to take into account the non-networked road users. The networked navigation scenario builds on the extensive developments from the GALILEOnautic 2 project, so that the established test vehicles of relevant vehicle size (including the research vessel Deneb) can be used without restriction.
The Chair of Control Engineering at the University of Rostock is dedicated to the challenge: local and central optimisation for trajectory generation and motion control of the networked vehicles.
Ceremonial inauguration of the new "Electrical Engineering" building at the University of Rostock
Finance Minister Dr. Heiko Geue, Science Minister Bettina Martin, Prof. Dr. Wolfgang Schareck, Rector of the University of Rostock, and Prof. Dr. Mathias Nowottnick, Dean of the Faculty of Computer Science and Electrical Engineering at the University of Rostock, ceremonially inaugurated the new "Electrical Engineering" building on the Südstadt campus of the University of Rostock on 29 March 2023.
The new building will house the Institute for Communications Engineering and the Institute for Applied Microelectronics and Data Technology. Both institutes are thus moving from the Warnemünde location to the Südstadt campus. At the same time, the new building offers the approximately 1,400 students of the Faculty of Computer Science and Electrical Engineering a modern and innovative teaching and research building with optimal conditions for research-oriented teaching and excellent research conditions.
The Institute of Automation Technology remains the only electrical engineering institute at the Warnemünde site. Due to the continued spatial separation of electrical engineering, students will still have to commute between Warnemünde and the Südstadt campus to attend their respective courses.
Further information on the new building can be found on the website of the Rostock State Building and Property Office, which is responsible for the project.


The future of inland navigation - digitally and logistically integrated
On Wednesday 22 March 2023, the Fifth Accompanying Research Group Meeting: "The Future of Inland Navigation - Digitally and Logistically Integrated" took place in Hamburg.
The event provided an overview of various research and development topics in this field and thus presented different approaches to securing the future of inland navigation.



Kick-off and official project start of SensorSOW
On Tuesday 21 March 2023, the kick-off meeting for the research project "SensorSOW - LIDAR-based sensor application for the detection, modelling and prediction of the movement behaviour of other road users on inland waterways" took place in Berlin at the Berliner Hafen- und Lagerhausgesellschaft mbH (BEHALA).
Partners in the consortium are Alberding GmbH and the Department of Maritime Systems Design at the Technical University of Berlin. The project consortium will test the functionality of LIDAR, SONAR, camera and GNSS sensor technology using existing test vehicles and test vessels in the digital test field Spree-Oder-Wasserstraße, process it and make it available in an assistance system.
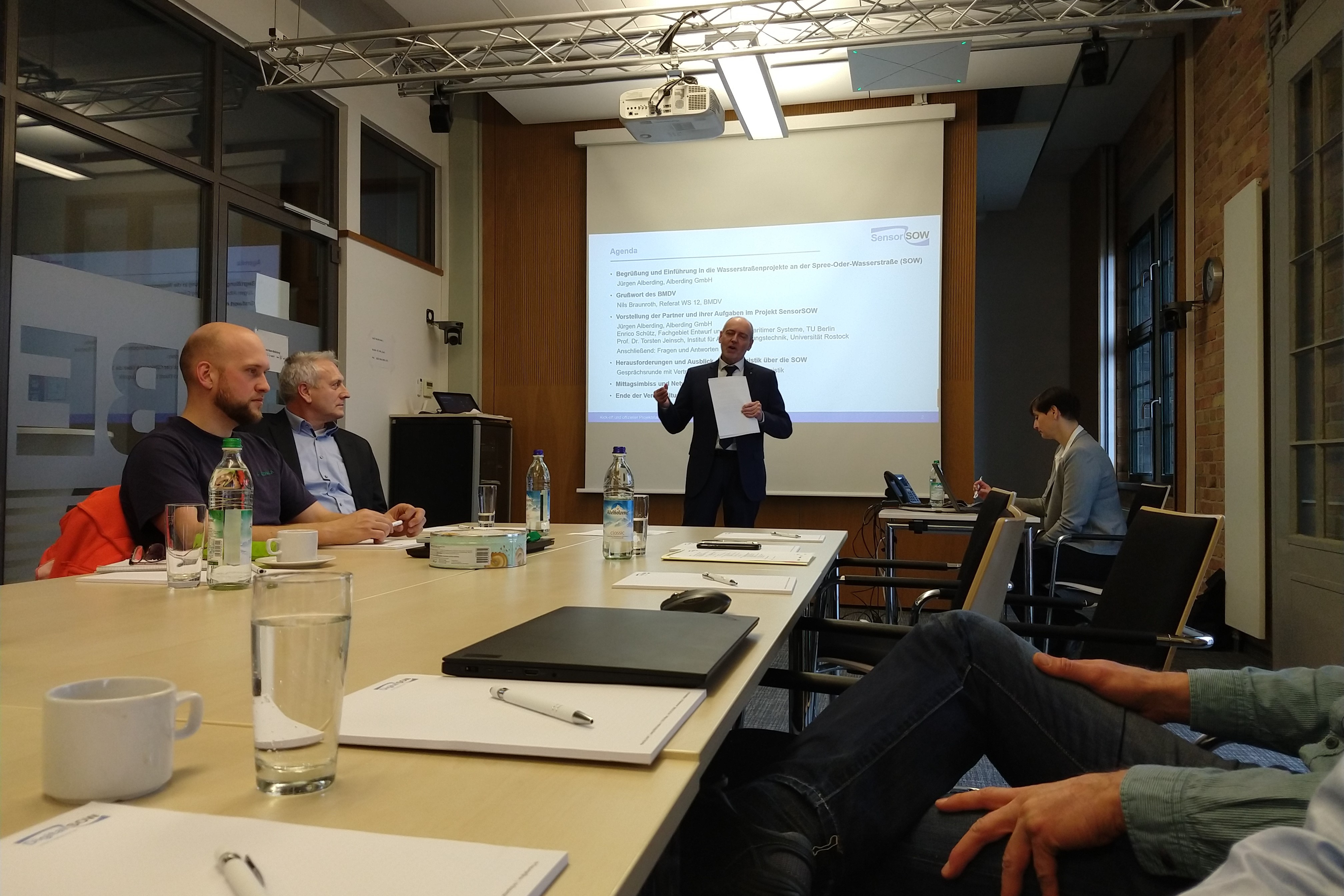
Christening of the research vessel ELLA
On Friday, 03.03.2023, the research vessel ELLA was christened in Duisburg harbour. ELLA was built within the framework of the BMDV's "Digital Testfields" funding programme built. It is a research vessel specially designed for the requirements of inland navigation and is to make an important and is intended to make an important contribution to the development of autonomous autonomous driving. In practical operation, special attention will be paid to. Manoeuvres in confined areas in order to enable the automation of port manoeuvres in the future. Automation of port manoeuvres in the future.


Colloquium on Digitalisation in Inland Navigation
The Colloquium on Digitalisation in Inland Navigation took place from 01 - 02 March 2023 on the premises of the Federal Waterways Engineering and Research Institute in Karlsruhe. The colloquium was jointly organised by the BAW, the ISMT and DST. Various representatives from research, politics and business were guests.



Prof. Holger Korte visits the Chair of Control Engineering

On 01.03.2023, the Chair of Control Engineering welcomed Prof. Holger Korte from the Jade University of Applied Sciences in Elsfleth. Prof. Korte, a former employee of the Institute of Automation Technology, has been researching in the field of ship and marine technology for many years. In an exciting lecture, the team of the chair and other interested people could inform themselves about the work and current research work of Prof. Korte. The focus was on the topic: Hydrodynamic mass - an important design parameter for marine engineering constructions. The subsequent round of questions and the discussions in smaller groups showed the mutual interest in the research work.
57th Control Engineering Colloquium in Boppard
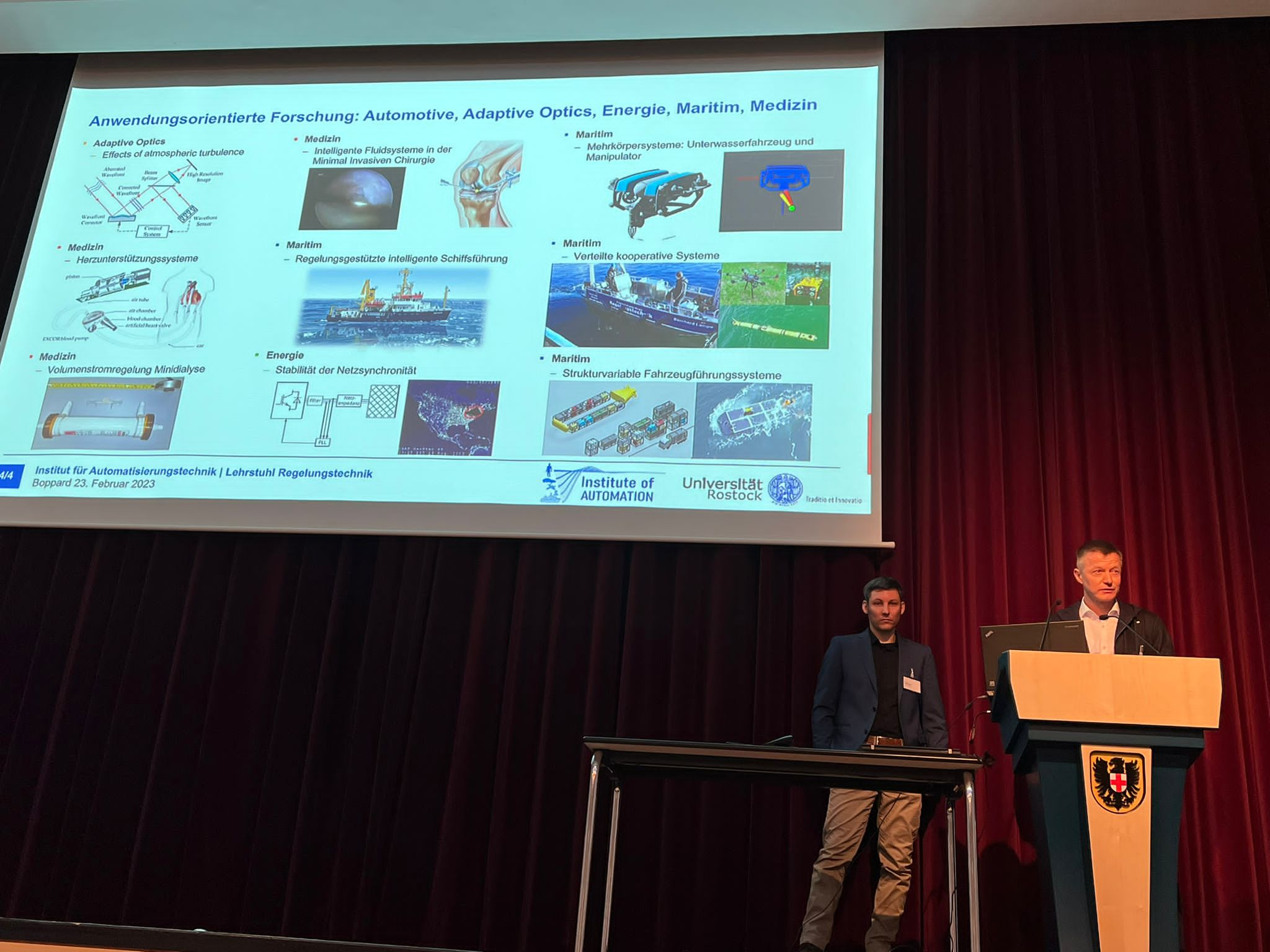
The Control Engineering Colloquium in Boppard is the annual meeting place of the control engineering community in the German-speaking region. About 80 control engineering professors, plus numerous automation technology professors, about 100 research assistants and some industry and association representatives regularly attend.
In contrast to specialist conferences, the Control Engineering Colloquium primarily has the character and function of a forum in which the universities and research institutes of the German-speaking region can present and discuss the latest results and innovative ideas from research and development in the field of measurement, control and automation technology.
Another aim of the colloquium is to bring together representatives from research and teaching with invited guests from industry for a mutually beneficial discussion on current questions and tasks in industrial practice as well as the applicability of new, efficient solution methods and concepts.
This year it was the turn of the Chair of Control Engineering from the Institute of Automation Technology at the University of Rostock to present its teaching and research areas. Afterwards, Dr Tobias Hahn presented his research results on the automation of manoeuvring watercraft and answered numerous questions from the expert audience.
Book "Sampled-Data Control for Periodic Objects
Since 3 February 2023, the new book „Sampled-Data Control for Periodic Objects“ by Efim N. Rosenwasser, Torsten Jeinsch and Wolfgang Drewelow has been published by Springerverlag.
The book “Sampled-Data Control for Periodic Objects” is devoted to the problem of sampled-data control of finite-dimensional linear continuous periodic (FDLCP) objects. It fills a deficit in coverage of this important subject. The methods presented here are based on the parametric transfer matrix, which has proven successful in the study of sampled-data systems with linear time-invariant objects. The book shows that this concept can be successfully transferred to sampled-data systems with FDLCP objects. It is set out in five parts:
- an introduction to the frequency approach for the mathematical description of FDLCP objects including the determination of their structure and their representation as a serial connection of periodic modulators and a linear time-invariant object;
- construction of parametric transfer matrix for different types of open and closed sampled-data systems with FDLCP objects;
- the solution of problems of causal modal control of FDLCP objects based on the mathematical apparatus of determinant polynomial equations;
- consideration of the problem of constructing a quadratic quality functional for the H2-optimization problem of a single-loop synchronous sampled-data system with control delay;
- description of the general H2-optimization procedure.
Necessary mathematical reference material is included at relevant points in the book.
Sampled-Data Control for Periodic Objects is of use to: scientists and engineers involved in research and design of systems of systems with FDLCP objects; graduate students wishing to broaden their scope of competence; their instructors; and mathematicians working in the field of control theory.

Open Day at the Control Engineering Application Centre
On Monday 19.12.2022, the Chair of Control Engineering invited to its traditional annual open day at the Application Centre.
This year, the Control Engineering Application Centre opened its doors to all semesters of the Bachelor's and Master's degree programmes in computer science and electrical engineering.
The autonomous and remote-controlled surface and underwater vehicles, ground effect vehicles, rovers and drones could be viewed and tried out. The laser scanner could be experienced while measuring and the dexterity on the bicycle with rear wheel steering was put to the test.
We are already looking forward to the next open day.



STATUS MEETING MARITIME TECHNOLOGIES 2022
On behalf of the Federal Ministry of Economics and Climate Protection (BMWK), Project Management Jülich invited participants to the "Maritime Technologies" status conference on 12 and 13 December 2022 in Berlin. This year, the conference took place at the Steigenberger Hotel Am Kanzleramt as a face-to-face event and offered selected contributions on successful projects from the BMWK's Maritime Research Programme. Panel discussions and keynote speeches focused on highly topical issues such as climate-neutral shipping, munitions waste in the sea and the importance of maritime infrastructures.
The Chair of Control Engineering presented its research results as part of a joint presentation of the joint research project A-SWARM - Autonomous Electric Shipping on Waterways in Metropolitan Regions.
Photos by:
Claudia Müller, MdB - Greeting by the Federal Government Coordinator for Maritime Economy and Tourism
Susanne Korich | Project Management Organisation Jülich - Maritime Research Programme: From Idea to Success
Dr Christian Masilge | Schiffbau-Versuchsanstalt Potsdam GmbH - A-SWARM - Autonomous Electric Navigation on Waterways in Metropolitan Regions



ROV trials in the Control Engineering Application Centre
On 06.12. and 07.12., experiments with colleagues from the DLR in Bremerhaven took place in the Control Engineering Application Centre as part of the MUM2 project.
The experiments involved the generation of data sets with camera and sonar technology of referenced objects under water using ROVs.
The data is to be used to learn procedures that will make it possible to estimate the object position and attitude for an automated gripping operation with ROVs from camera and sonar data.
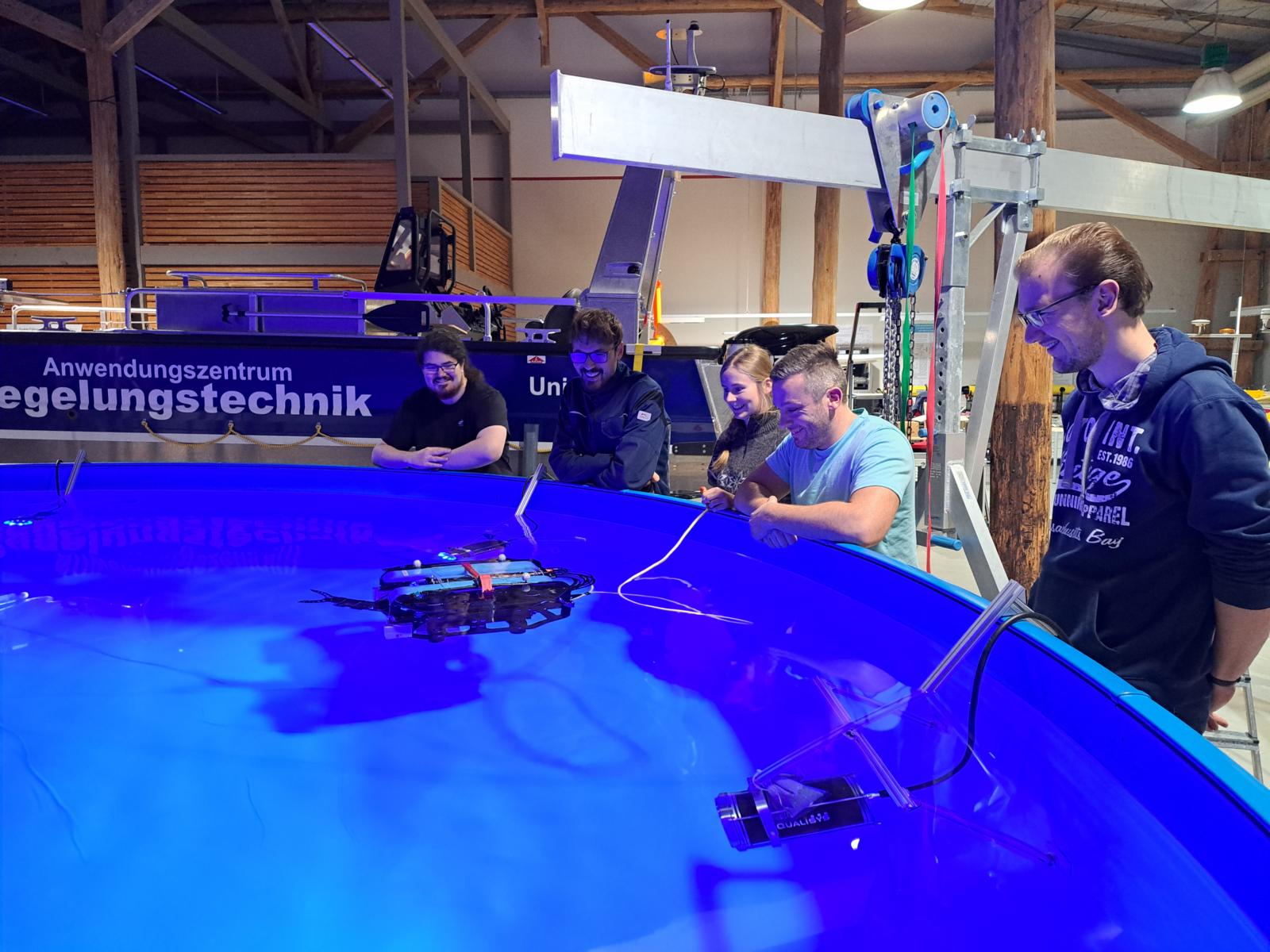
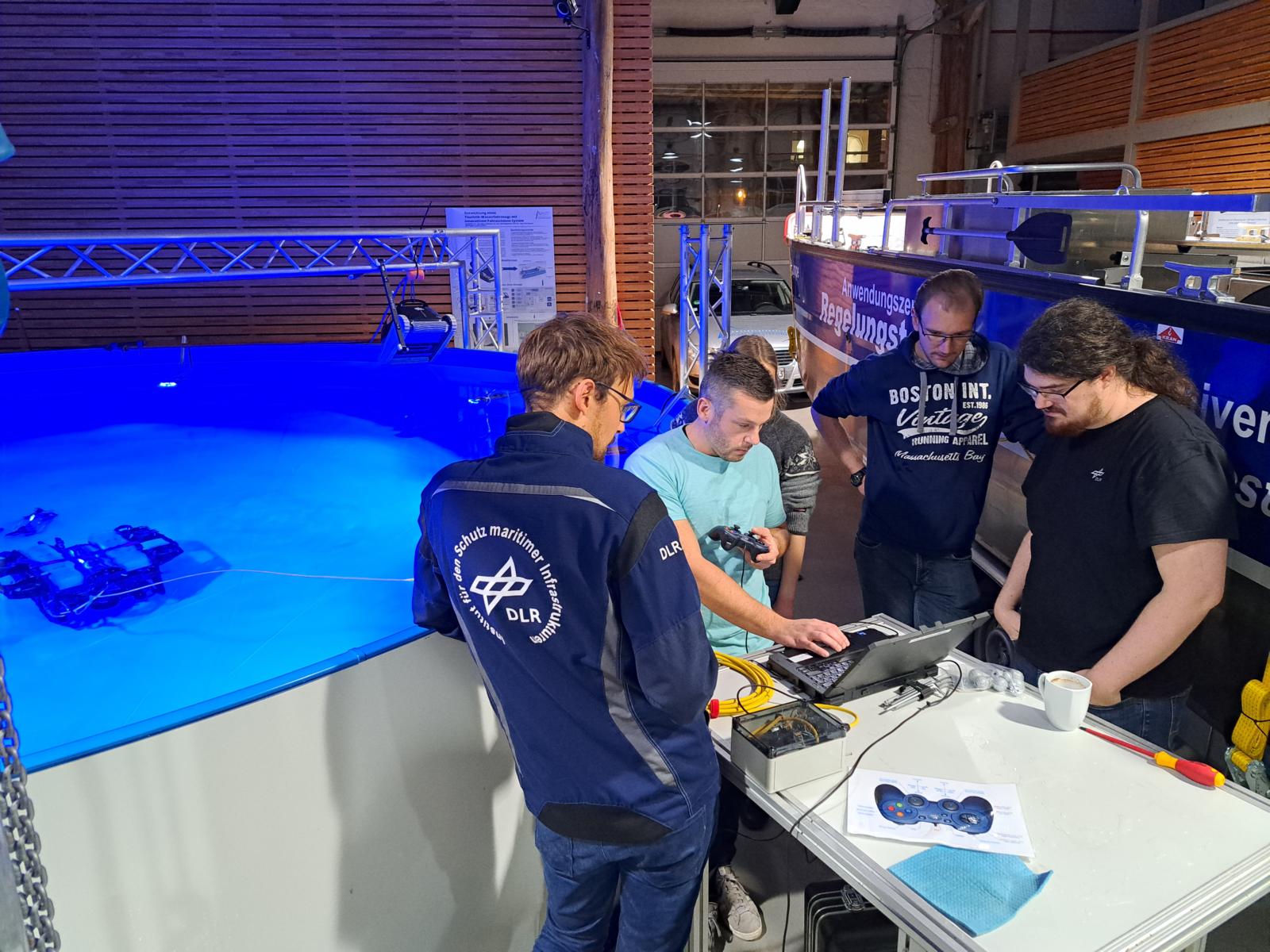

Knowledge of the ocean is key to achieving the UN Sustainable Development Goals - marine research is climate research and precautionary research, also for food and energy security
In 2019, the federal state of Mecklenburg-Vorpommern founded the German Alliance for Marine Research (DAM) together with the other northern German states and the federal government.
On 23.11.2022, the German Alliance for Marine Research invited to the Parliamentary Evening at the Staatstheater Schwerin to present its work. Knowledge about the ocean is key to achieving the UN Sustainable Development Goals. Marine research is climate research and precautionary research, also for food and energy security, and was the focus of the event this evening.
The Chair of Control Engineering presented selected exhibits of their automated underwater vehicles. Autonomous (AUV) and cabled (ROV) underwater vehicles are often used for area-wide data generation and targeted sampling.



15 Years Interdisciplinary Faculty at the University of Rostock
On 11 October 2007, the Interdisciplinary Faculty was founded in a ceremonial act in the University Church. Professor Udo Kragl, the current Vice Rector for Research and Knowledge Transfer, was elected as the founding dean. With the founding of the Interdisciplinary Faculty, the then Rector of the University of Rostock, Professor Thomas Strothotte, had taken a new path. The model of a virtual faculty, currently unique in Germany, was launched in 2007 with three departments: Life, Light & Matter, Ageing of the Individual and Society, and Maritime Systems. In 2010, another department was added: Knowledge - Culture - Transformation.
Within the scope of its membership in the Department of Maritime Systems, the Chair of Control Engineering was involved with the underwater equipment carriers
Autonomous Underwater Vehicle - AUV
Remotely Operated Vehicles - ROV (Blue ROV and EVO ROV)



8th Hydrodynamic Symposium
From 04-06 October 2022, staff from the Institute of Automation Technology took part in the eighth Hydrodynamic Symposium in Heidenheim. In numerous interesting lectures, the main topics were: Safety in Ship Assistance, More Operating Days in Heavy Weather in Dynamic Positioning, Low Fuel Costs as well as Quiet and Robust Drives were intensively discussed. The successful research and development activities in the joint projects DPMotion and DPII of the Institute of Automation Technology provided much food for discussion and new ideas for future research projects.



Breaking the Surface 2022 in Croatia
After a two-year break due to the corona pandemic, a contingent from Rostock took part again this year in the "Breaking the Surface" workshop in Biograd na Moru, Croatia. The workshop, which is already taking place for the fourteenth time and combines the topics of maritime robotics, marine biology, marine archaeology, marine geology and maritime security, was held this year from 25 September to 2 October. The Institute's participants used this platform to exchange experiences with numerous experts on the planned exploration and test track for autonomous underwater robot systems in the Control Engineering Application Centre. The IAT was represented this year by Johannes Marx, Ian Karez, Sven Lack, Martin Kurowski and Torsten Jeinsch.


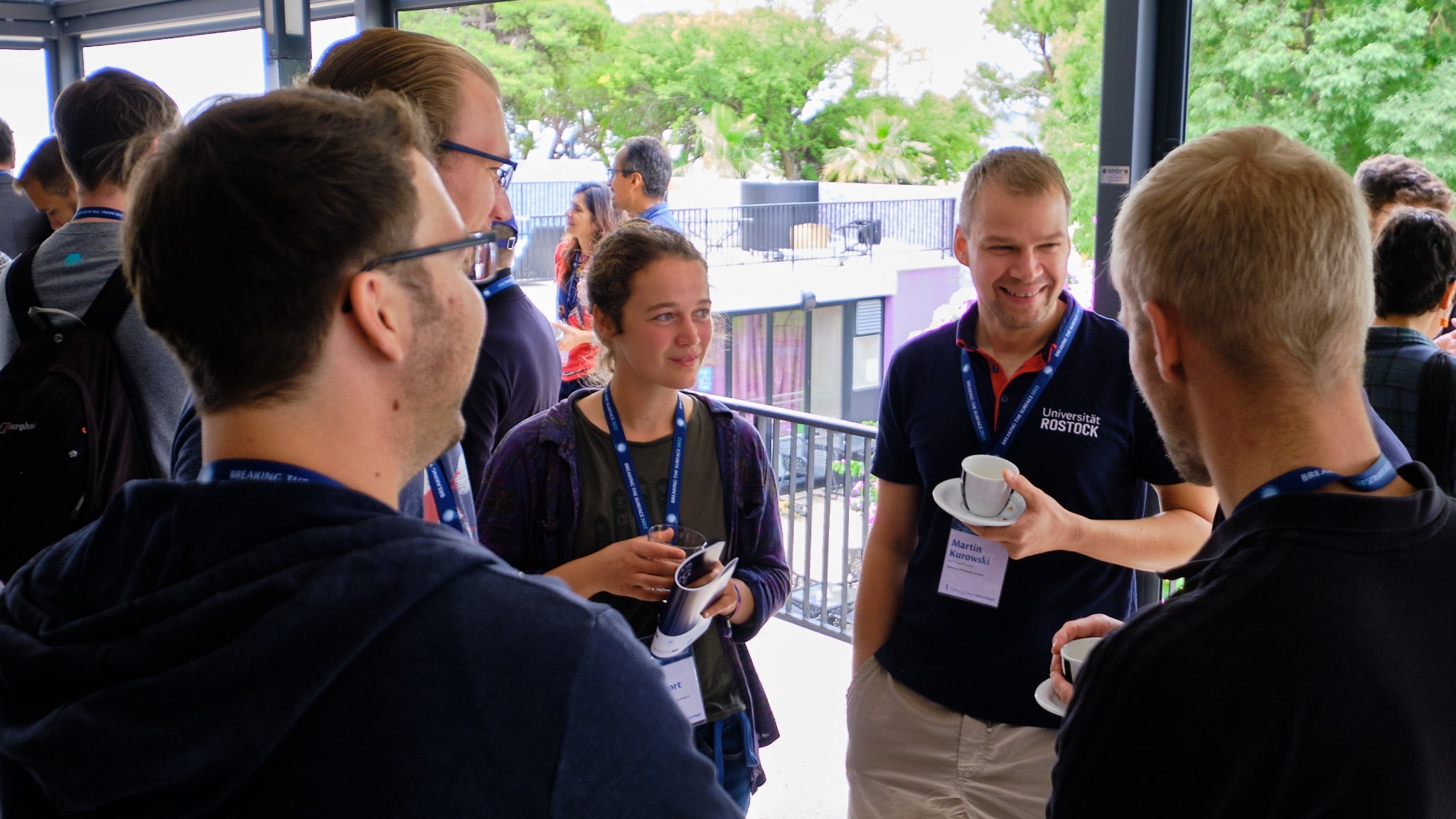
Team from the Chair of Control Engineering wins international competition in underwater localisation



Researchers from the University of Rostock and the Leibniz Institute for Baltic Sea Research Warnemünde (IOW) were able to convince with their sophisticated technology for localisation under water at the so-called "Underwater Localization Challenge". The competition in the field of underwater localisation took place as part of the international, interdisciplinary workshop for maritime robotics and applications entitled "Breaking the Surface" in Biograd na Moru, Croatia with over 200 participants from 22 nations. Thanks to the support of the Rostock International House, the trip of the three PhD students from the University of Rostock and their participation in the workshop from 25 September to 2 October could be financed.
The Rostock team with doctoral students Greta Markfort (IOW) and Sven Lack, Johannes Marx and Ian Karez (Chair of Control Engineering at the University of Rostock) prevailed despite difficult weather conditions. They succeeded in winning the international competition to find a transmitter submerged in the sea in all three categories - exact, efficient and novel. The innovative and previously rather unconventional methodology they developed, based on a step-by-step approach to the mathematical solution of the problem, ultimately led to the most accurate position result with a deviation of only thirty metres from the true position.
The winning team was finally allowed to present their approach to the large workshop audience. "We are very happy about the result, especially since we were the last team to compete when the wind was already picking up enormously and therefore the conditions for locating the underwater transmitter were not optimal," says Sven Lack, doctoral student at the Chair of Control Engineering at the University of Rostock. Supervisor Prof. Torsten Jeinsch adds: "I am very proud of our team, whose performance convinced not only the experts in underwater acoustics. This once again confirms the very good engineering education at the University of Rostock."
Tracking and communication under water is anything but trivial. This is because electromagnetic waves, which are used for satellite navigation, radio or WLAN, for example, are attenuated much more strongly in water. Therefore, it is not possible to use these technologies for communication and positioning in water. With the help of techniques of so-called underwater localisation, which is based on the time-of-flight measurement of acoustic signals, divers or robots that emit sound waves, for example, can be found more easily in the water. However, acoustic underwater localisation brings with it some challenges. For example, there is the question of how fluctuations in the speed of sound can be overcome due to different density and temperature conditions at depth and how the travel time of a signal changes underwater as a result.
The so-called "Underwater Localisation Challenge" took place as part of the 14th "Breaking the Surface" workshop. The competition task was to locate a submerged acoustic transmitter in the Adriatic Sea off Biograd na Moru in an area of 800 by 800 metres. The six international teams were each given a boat to deploy the measurement equipment and apply their special localisation method within one hour. For localisation, the teams first sank three microphones in the water in geometric arrangements they had determined themselves. Due to the different distances between the transmitter and the microphones, the reception times vary. These are influenced by the speed of sound in the water, the synchronisation of the microphones and the position of the acoustic transmitter. From these raw acoustic data, the respective distance to the transmitter and the corresponding sound velocity can then be calculated and thus finally the location of the transmitter can be determined.
Dissertation Defense of Dr.-Ing. Michèle Schaub

On 21 September 2022, Dr.-Ing. Michèle Schaub successfully defended her dissertation thesis on "Contribution to the prediction of particle emissions due to ship manoeuvres using artificial neural networks " at the Faculty of Mechanical Engineering and Ship Technology at the University of Rostock .
Members of the dissertation committee were: Prof. Buchholz (Chairman) - University of Rostock, Prof. Müller - University of Rostock, Prof. Jeinsch - University of Rostock, Prof. em. Benedict - HS Wismar, Prof. Kornev - University of Rostock.
Congratulations!
14th IFAC Conference on Control Applications in Marine Systems, Robotics and Vehicles
From 14.-16. September 2022, the 14th IFAC Conference on Control Applications in Marine Systems, Robotics and Vehicles took place at the Technical University of Denmark in Kongens Lyngby.
The Chair of Control Engineering was represented with the contribution Reference Tracking Control for Maneuvering Vessels considering Input Delay
Hahn, T., Rethfeldt, C. Jeinsch, T.: „Reference Tracking Control for Maneuvering Vessels considering Input Delay”



4th AISS Autonomous Inland and Short Sea Shipping Conference
From 19-22 September 2022, the 4th AISS Autonomous Inland and Short Sea Shipping Conference edition of the DST - Development Centre for Ship Technology and Transportsystems took place in Duisburg.
The Chair of Control Engineering was represented with the contribution A-SWARM Autonomous Electric Shipping on Waterways in Metropolitan Regions
Marx, J., Damerius, R., Kolewe, B., Jeinsch, T.: „ A-SWARM Autonomous Electric Shipping on Waterways in Metropolitan Regions”
Testing of assistance and control systems on the research vessel Deneb
Teams of the University of Applied Sciences Wismar and the University of Rostock had the opportunity to participate in test runs with the research vessel Deneb of the BSH from 05.09.-07.09.22 . The aim was to investigate the adaptation of the steering strategy for assisted and automated mooring under consideration of environmental influences based on expert nautical knowledge. Subsequently, numerous manual, assisted and automated mooring maneuvers were performed to derive statistical properties.
A big thank you goes to the BSH for the possibilities to test on the Deneb and of course to the whole crew of the Deneb for the great support and perseverance during the testing of the assistance and control systems.


Demonstration and final testing of A-SWARM in Berlin's Westhafen
In the Berlin Westhafen, took place from 29 August to 02 September 2022 as part of the joint project A-SWARM the final testing and demonstration.
The methods and algorithms developed in the project for trajectory planning, position control and collision avoidance were tested. The representatives of the project sponsor PtJ who were present were given a clear demonstration of the results in addition to the tests.The experimental catamaran "Bernhard Lampe" of the chair served here as a mobile base and for the presentation of other road users in encounter and overtaking situations.



Dissertation Defense of Dr.-Ing. Tobias Hahn

On July 15, 2022, Dr.-Ing. Tobias Hahn successfully defended his dissertation thesis on the topic "Contribution to the identification of the maneuvering behavior of watercraft for the design of assistance functions".
Members of the dissertation committee were: Prof. Dr. van Rienen - University of Rostock, Prof. Dr. Torsten Jeinsch - University of Rostock, Prof. Dr. Maksoud - TU Hamburg, Prof. Dr. Cai - University of Rostock, Prof. Dr. Kühn - University of Rostock, Prof. Dr. Weber - University of Rostock, Prof. Dr. Wolkenhauer - University of Rostock.
Congratulations!
MED22 - Mediterranean Conference on Control and Automation
The 30th edition of the Mediterranean Conference on Control and Automation took place this year in Athens. From June 28th to July 1st, exciting topics and current research foci around the topic of automation and control engineering were presented and discussed at the conference.
The Chair of Control Engineering was also represented there with a small delegation.
In addition to the four presentations by Agnes Schubert, Ian Karez, Sven Lack and Johannes Marx, there was also an online contribution by Robert Damerius.
The conference venue in the district of Vouliagmeni, located directly at the Mediterranean Sea, offered besides the professional exchange also the possibility to establish new contacts for future collaborations.

DLR Science Summer
On July 1, 2022, employees of the Chair of Control Engineering accepted the invitation of the German Aerospace Center (DLR) to the Science Summer in Neustrelitz.
For 30 years, Neustrelitz has been one of 30 DLR locations. In six facilities and research institutes, research and development work focuses on the topics of space weather, satellite data reception, satellite remote sensing, navigation, and maritime traffic and maritime security.
On this occasion, DLR invited to the Science Summer Neustrelitz. The event looked back on the successful development of the site and provided information on current projects in maritime security research, space weather research and the German Remote Sensing Data Center. The event was concluded with the inauguration of a new antenna for the data reception of future missions.



Workshop - Master's program in ship and marine technology in Rostock
On June 30, 2022, the Chair of Control Engineering staff members participated in the workshop on the Master's degree program in Ship and Ocean Engineering within the framework of the OCEAN TECHNOLOGY CLUSTER - OCEAN TALENTS.
The University of Rostock is currently developing an international, English-language Master's degree program in Ship and Ocean Engineering to replace the existing program within the next few years. The changeover will also be used to align the content of the degree program with the current and future needs of the maritime industry.
Presentation on the Common Issue Day / RIS - Expert Week
On Wednesday, June 29, 2022, the participants of the CESNI RIS-week (International Conference on River Information Technologies) were given an insight into the current research project A-SWARM - Autonomous Electric Navigation on Waterways in Metropolitan Regions. In basin 1 of the Westhafen of BEHALA in Berlin, the project consortium presented selected scenarios for trajectory planning, position control and collision avoidance.



Around 1.33 million for joint project on the digitization of shipping
On June 28, 2022, Dr. Volker Wissing, Federal Minister of Digital Affairs and Transport, presented the project consortium "SensorSOW - LIDAR-based sensor application for the detection, modeling and prediction of the movement behavior of other road users on inland waterways" with the funding certificate. Partners in the consortium are the University of Rostock with Professor Torsten Jeinsch from the Chair of Control Engineering, Alberding GmbH and the TU Berlin.
The aim of the project is to develop and test sensor and assistance systems for determining the position of ships and traffic as well as the fairway under water in order to increase the degree of automation in navigation. The project consortium will receive total funding of around 1.33 million euros for a project duration of two years. The functionality of the sensor technology, consisting of LIDAR, SONAR, camera and GNSS sensor technology, is to be tested and processed during this period using existing test vehicles and test ships in the digital test field Spree-Oder-Waterway and made available in an assistance system.
Through the funding program for the development of digital test fields on federal waterways, the Federal Ministry of Digital Affairs and Transport is providing a total of around 34 million euros until the end of 2024 to support industry and research in testing automated systems for navigation.
More information can also be found at: https://www.bmvi.de/SharedDocs/DE/Pressemitteilungen/2022/038-wissing-projekt-sensorsow-auf-spree-oder.html
Quelle:


Culture tips from 24.06.2022: Autonomous shipping
The local TV station MV1 asked for an interview on June 23, 2022, to learn more about the challenges of the multirobot system after the naming ceremony of our experimental catamaran.
For this purpose, Tom Draheim from MV1 met with Dr. Martin Kurowski for a short casual round of talks at the Control Engineering Application Center. You can listen to and watch the article at Kulturtips on autonomous shipping.


Meeting Parliamentary Group Inland Navigation in the Westhafen Berlin
On Monday, June 20, 2022, the research project "A-SWARM Autonomous Electric Shipping on Waterways in Metropolitan Regions" was presented to the Parliamentary Group on Inland Navigation at the Westhafen of the Berliner Hafen- und Lagerhausgesellschaft (BEHALA). In addition to a lecture, it was demonstrated how autonomous ship units could be used to shift goods from congested roads to water in urban areas in the future.

Ship christening of our experimental catamaran "Berndhard Lampe" of the University of Rostock
On June 16, the naming ceremony of the new experimental catamaran of the University of Rostock took place. In the future, the "Bernhard Lampe" will even be able to sail unmanned on the Baltic Sea and take on marine research tasks.
The new, highly maneuverable experimental catamaran "Bernhard Lampe" is the basis of a future multi-robot system - unique in Mecklenburg-Vorpommern. Equipped with two underwater vehicles and a drone, it can autonomously, i.e. without a helmsman on board, take measurements of water temperature and salinity in the Baltic Sea, for example.
The goal of Professor Torsten Jeinsch, coordinator of the autonomous multirobot system from the Rostock Chair of Control Engineering, is "to bring the catamaran into position in the Baltic Sea in the future in conjunction with other measuring vehicles from my office. This way, our colleagues from marine research would no longer have to go out to sea themselves to regularly take water or sediment samples from the Baltic Sea."
As an equipment carrier and workboat, the "Bernhard Lampe" has two powerful jet engines, an on-board crane and a winch. The digitized interfaces to the propulsion technology, navigation and environmental sensor technology allow a combination with further highly automated and autonomous research equipment.
Already in mid-October 2020, the "Bernhard Lampe", jointly funded by the state and the university, was handed over by the Rostock-based company Nordland Hansa GmbH to the Chair of Control Engineering at the University of Rostock. The christening of the automated catamaran had to be postponed to June 2022 due to pandemic-related restrictions. The name "Bernhard Lampe" was chosen in memory of the former chair of control theory. With the naming ceremony, the "Bernhard Lampe" can now be officially launched. The ship was christened by the godmothers Bianca and Ida Lampe - daughter and granddaughter of the already deceased engineering scientist - at the Control Engineering Application Center of the University of Rostock.
"I am pleased about the dignified commemoration of Professor Bernhard Lampe. The University of Rostock now has a state-of-the-art research catamaran with up-to-date technology. It sustainably strengthens the research competence of the faculty in the field of marine research," said the Rector of the University of Rostock, Professor Wolfgang Schareck.
Professor Torsten Jeinsch emphasizes the excellent cooperation throughout the team: "In cooperation with the companies involved, we have been able to further develop the algorithms for unmanned navigation in recent years so that autonomous research sailing will be possible in the future."
Quelle:



11th IFAC Symposium on Fault Detection Supervision and Safety (SAFEPROCESS)
The 11th IFAC Symposium on Fault Detection Supervision and Safety was held in Pafos, Cyprus from June 08 to 10, 2022.
The Chair of Control Engineering was represented with the contribution "Application of Hidden Markov Models for Fault Detection in Automotive Engines ".
- Salehian, M., Haghani, A., Jeinsch, T.: „Application of Hidden Markov Models for Fault Detection in Automotive Engines”


Testing in the joint project A-SWARM
From June 7 to 10, 2022, the next test took place in Berlin's Westhafen on the premises of the project partner BEHALA as part of the joint project A-SWARM. The focus of the testing was the testing of the developed algorithms for trajectory planning, position control and collision avoidance. This time, the experimental catamaran "Bernhard Lampe" of the chair was part of the team. It served as a mobile base and for displaying other road users in encounter and overtaking situations.




Project meeting in the cooperative project DigitalSOW
In the context of the project DigitalSOW a meeting of the project partners Alberding GmbH and the University of Rostock was arranged on 28.04.2022.
The reason for the exchange in Rostock was the presentation of the different test vehicles in the control engineering application center as well as the presentation of the sensor systems and the simulation environment in the laboratory in Warnemünde.
Testing in the joint project A-SWARM, from March 21 - 25, 2022.
In the joint project: A-SWARM - Autonomous electric shipping on waterways in metropolitan regions; A-SWARM Control, autonomously operating water vehicles were tested by the project partner, BEHALA - Berliner Hafen- und Lagerhausgesellschaft mbH, in Berlin.
The project is intended to contribute to modern city logistics on the basis of autonomous, couplable and electrically operated water vehicles. The focus is on the development and testing of autonomously operating water vehicles. The feasibility of such a system is to be demonstrated in a real laboratory in the area of Berlin's Westhafen (Spree / Charlottenburg Verbindungskanal / Westhafenkanal / Berlin Spandauer Schifffahrtskanal).