Lehrstuhl für Regelungstechnik
Zu den Aufgaben der Professur Regelungstechnik gehört die Vermittlung der Theorie und der praktischen Anwendung der Steuerungs- und Regelungstechnik sowie der Modellbildung und Simulation für die Studenten der Studiengänge Elektrotechnik, Informationstechnik/Technische Informatik, Wirtschaftsingenieurwesen, Aquakultur und den Masterstudiengang Computational Engineering.
Kontakt
Prof. Dr.-Ing. Torsten Jeinsch
Richard-Wagner-Str. 31, Haus 8, Raum 8132
D-18119 Rostock-Warnemünde
Tel: + 49 (0)381 498-7701 Fax: + 49 (0)381 498-7702
Email: torsten.jeinsch@uni-rostock.de
Termine
Aktuelles
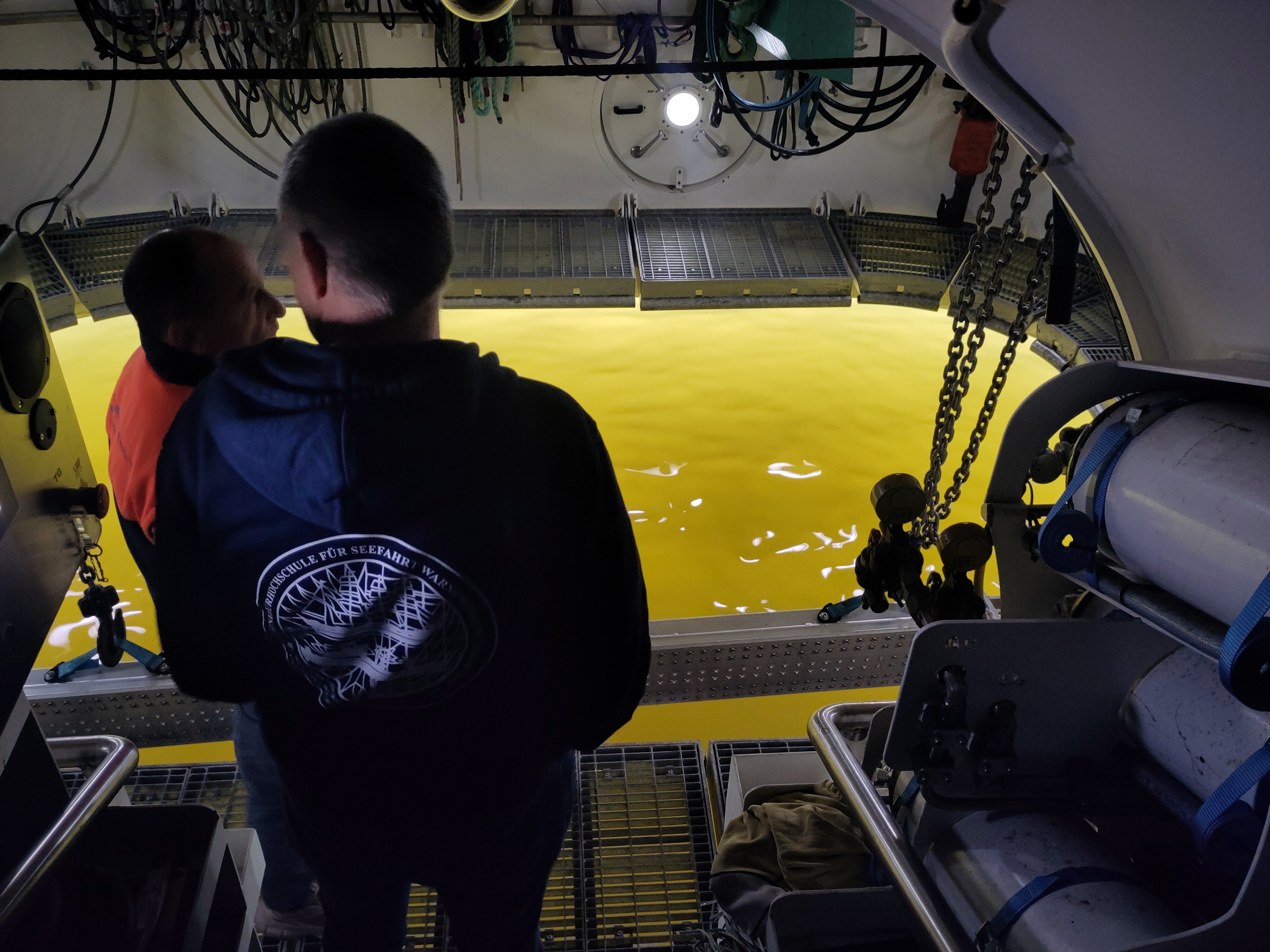
Identifikationsfahrten auf dem TS Archimedes
Nach reparaturbedingten Verzögerungen haben vom 09. bis 11. März die ersten Fahrten auf dem Tauchglockenschiff Archimedes des WSA-Rhein zur Modellidentifikation stattgefunden. Im gleichen Zuge konnten auch die Tests der Netzwerkkommunikation erfolgreich abgeschlossen werden. Vor Ort waren neben dem Lehrstuhl Regelungstechnik auch Schottel und die Hochschule Wismar. Die Messergebnisse der durchgeführten Fahrten werden zur Bestimmung eines realistischen Bewegungsmodells des Schiffes für regelungstechnische und simulative Anwendungen im Rahmen des Projektes StruMan genutzt. Neben der Projektarbeit war auch Zeit für eine Besichtigung des einzigartigen Spezialschiffes und seiner Tauchglocke.


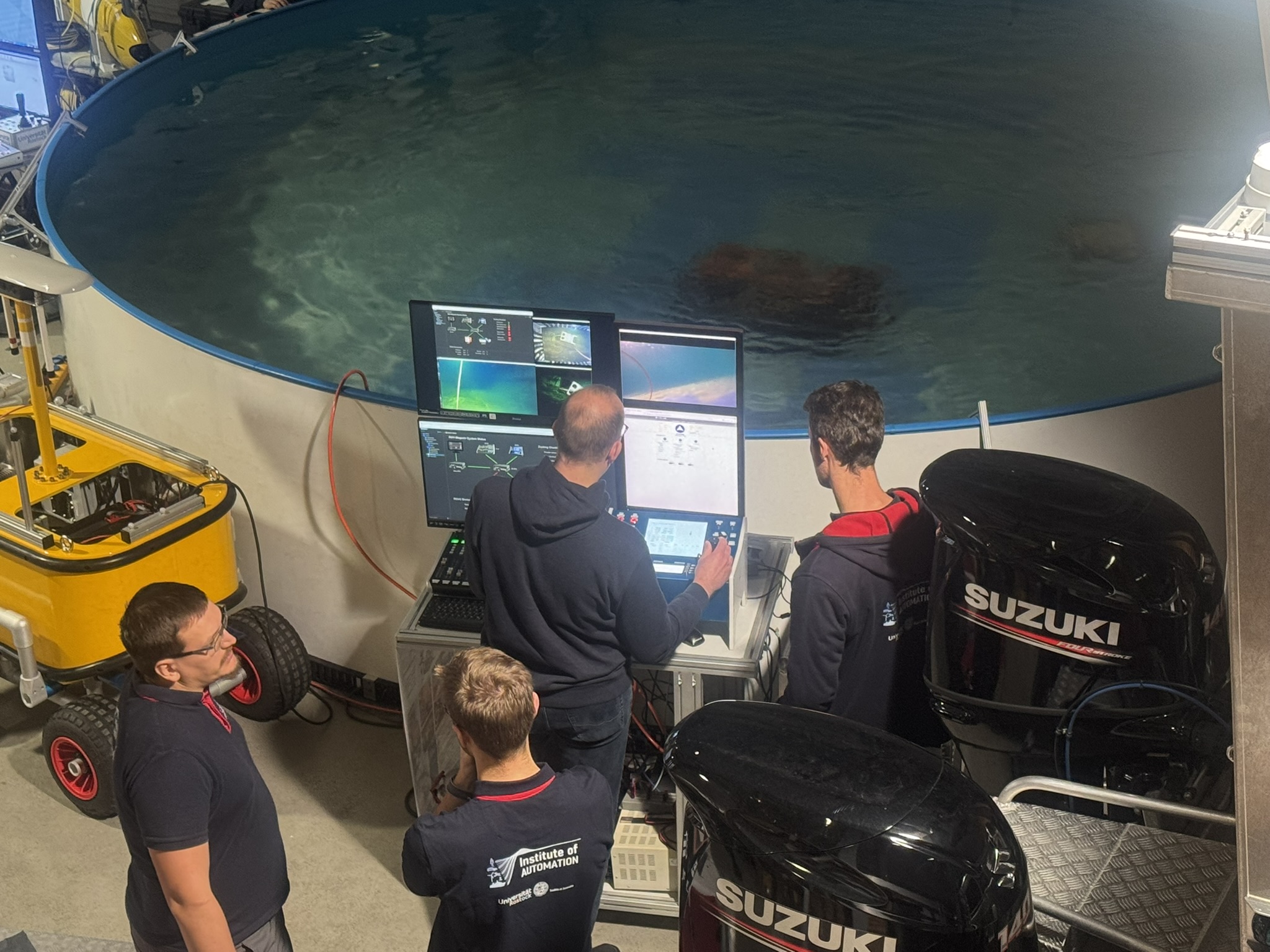
Weitere Erprobung des ROV-Magazins: Automatisches Docking bei Vorausfahrt

Vom 02.03. bis 06.03.2026 wurden die Erprobungen des ROV-Magazins im Rahmen des MUM-Projekts fortgeführt. Der Schwerpunkt dieser Versuchsreihe lag auf der Steigerung der Zuverlässigkeit und Reproduzierbarkeit des automatischen Ein- und Ausdockens des Remotely Operated Vehicles (ROV).
Die optische Lokalisierungslösung für die Endphase des Dockingvorgangs wurde durch eine zweite Docking-Kamera erweitert und algorithmisch feinjustiert. Ergänzend kam erstmals eine akustische Lokalisierungslösung für größere Entfernungen unterhalb des Magazins zum Einsatz, um die Annäherungsphase zu unterstützen.
Zudem wurden neue Regelungsverfahren zur präzisen freien Positionierung und Orientierung des ROVs in allen sechs Freiheitsgraden getestet. Auch das Tether-Management-System wurde weiter optimiert, z.B. hinsichtlich der zuverlässigen Schätzung der aktuell ausgebrachten Kabellänge.
Ein zentraler Meilenstein war die erfolgreiche Demonstration des automatischen Ein- und Ausdockens bei gleichzeitiger Vorausfahrt des Magazins. Dies entspricht dem späteren Einsatzszenario, in welchem das ROV-Magazin als Modul in das MUM-Gesamtfahrzeug integriert und während der Fahrt betrieben werden soll. Die Ergebnisse stellen einen wichtigen Schritt in Richtung Integration des ROV-Magazins in das MUM-System dar und wurden in enger Zusammenarbeit mit unseren Partnern der Technischen Universität Berlin erzielt.
Neues Qualisys Motion Capture System im Anwendungszentrum Regelungstechnik einrichtet

Mit der erfolgreichen Beschaffung eines weiteren Motion-Capturing-Systems sowie der dazugehörigen Schulung am 25. und 26. Februar 2026 wurde die experimentelle Infrastruktur des Testbeckens im Anwendungszentrum Regelungstechnik der Universität Rostock gezielt weiter ausgebaut. Das bestehende markerbasierte Lokalisierungssystem für den Unterwasserbereich, das bislang aus acht Miqus M5U Kameras der Firma Qualisys bestand, wurde durch ein neues Kamerasystem, bestehend aus zehn Miqus M3 Kameras desselben Herstellers, für den Überwasserbereich ergänzt.
Diese Erweiterung ermöglicht erstmals eine kombinierte, präzise Erfassung von Bewegungen sowohl über als auch unter der Wasseroberfläche, wodurch sich vielfältige neue Möglichkeiten für domänenübergreifende Untersuchungen ergeben. So können zum Beispiel nun komplexe Interaktionen zwischen kooperierenden Multirobotersystemen in hybriden maritimen Umgebungen unter Laborbedingungen untersucht werden. Die präzise Erfassung von Bewegungsdaten ermöglicht dabei eine fundierte Analyse und Validierung von Steuerungs- und Regelungsalgorithmen sowie von Bewegungsabläufen.
Die Beschaffung des Motion-Capturing-Systems erfolgte unabhängig von bestehenden Fördervorhaben und wurde eigenständig finanziert. Die erweiterte Infrastruktur ergänzt jedoch in idealer Weise die im Rahmen des bewilligten DFG-Forschungsgroßgeräts „Modulare, maritime Experimentalplattform zur Erforschung von Multi-Domänen-Fahrzeugsystemen“ geplanten experimentellen Möglichkeiten.
Kick-off-Meeting für das Verbundprojekt „ModularShipAssist 2“

Am 15. Januar 2026 fand in Hamburg beim Konsortialführer, der Fairplay Schleppdampfschiffs-Reederei Richard Borchard GmbH, das Kick-off-Meeting für das Verbundprojekt „ModularShipAssist 2 – Autonom und kooperativ agierende Module zur kommandierten Schiffsassistenz in Häfen“ statt.
Die Projektpartner – die Fairplay Schleppdampfschiffs-Reederei Richard Borchard GmbH, die J.M. Voith SE & Co. KG | VTA, die Technische Universität Hamburg sowie die Universität Rostock – setzen gemeinsam mit den assoziierten Partnern, der HPA Hamburg Port Authority AöR sowie der Hafenlotsenbrüderschaft Hamburg, die Entwicklung eines modularen Assistenzsystems konsequent fort. Ziel ist es, Schiffsmanöver in Häfen künftig sicherer, effizienter und zuverlässiger zu unterstützen.
Das Verbundprojekt „ModularShipAssist 2“ wird vom Bundesministerium für Digitales und Verkehr mit rund 2,6 Millionen Euro gefördert.
Hinweis: Abschlussdemonstration im Verbundvorhaben „ModularShipAssist“
Am Donnerstag, den 23.04.2026, findet von 10:00 bis 15:00 Uhr an der Wassersportanlage / Bootshaus der Universität Rostock die Abschlussdemonstration des Projektkonsortiums „ModularShipAssist“ statt.
Gezeigt werden Demonstrationen des ModularShipAssist-Systems im Modellmaßstab auf offenem Gewässer sowie die Vorstellung zentraler Projektinhalte im Rahmen einer kompakten Vortragsreihe.

"OPEN AZR" Tag der offenen Tür im Anwendungszentrum Regelungstechnik
Am 15.12.2025 von 15:00 Uhr bis 18:00 Uhr öffnete auch in diesem Jahr das Anwendungszentrum Regelungstechnik seine Türen für alle Semester der Bachelor- und Masterstudiengänge der Informatik und Elektrotechnik, sowie Gästen und heißt Sie herzlich willkommen.
Es konnten autonomen und ferngesteuerten Über- und Unterwasserfahrzeuge, Bodeneffektfahrzeuge, Rover und Dronen besichtigt und ausprobiert werden, der Laserscanner beim Vermessen erlebt werdem oder die Geschicklichkeit auf dem Fahrrad mit Hinterradlenkung auf die Probe gestellt werden.
Wir bedanken uns bei allen Gästen. Bis zum nächsten Jahr.

Rostocker Unterwassergruppe in der VWS Berlin
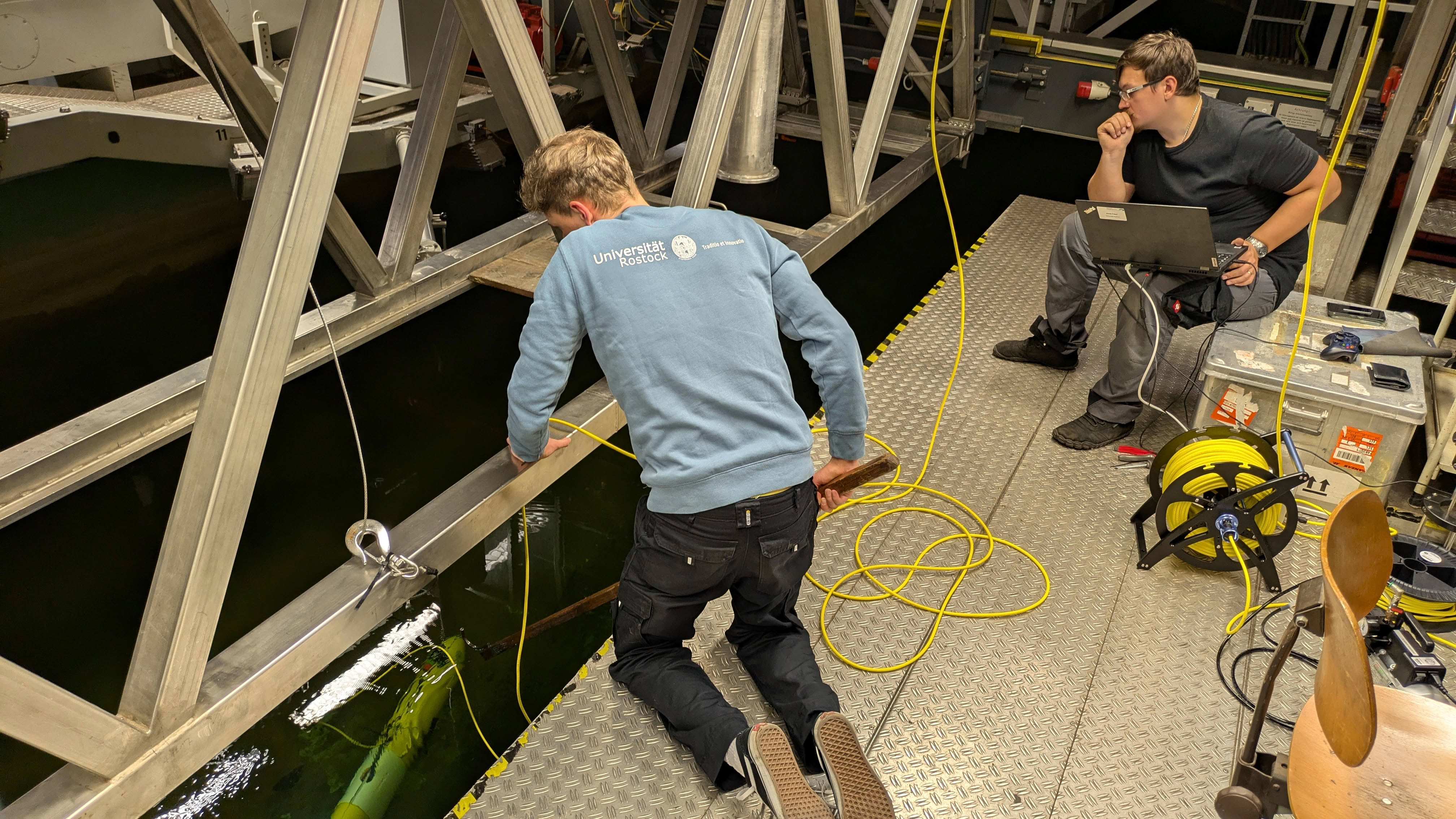
Die Arbeitsgruppe Unterwasser des IAT und ein Kollege des Lehrstuhls Meerestechnik machten sich auf in die Bundeshauptstadt, um dort ihre Fahrzeuge zu testen.
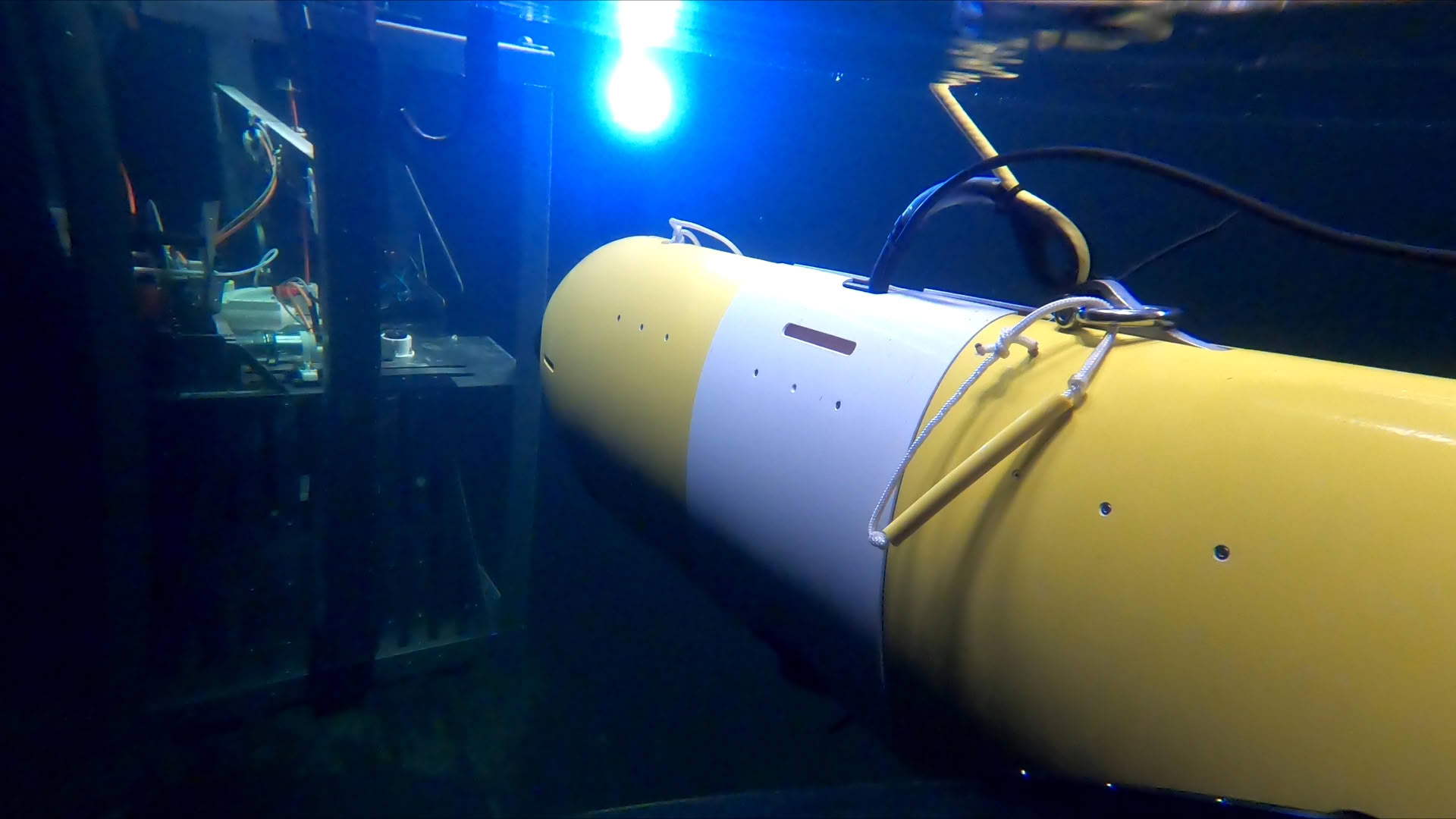
Automatisiertes Ein- und Ausdocken eines Remotely Operated Vehicles (ROV) in und aus seinem Magazin - dies ist das erfolgreiche Ergebnis der jüngsten Erprobung im Projekt MUM. Vom 01. bis zum 10. Dezember waren hierzu erneut Mitarbeiter des Lehrstuhls Regelungstechnik bei Ihren Partnern vom Fachgebiet Entwurf und Betrieb maritimer Systeme der Technischen Universität Berlin zu Gast, um die gemeinsamen Entwicklungen zum ROV-Magazin in der Versuchsanstalt für Wasser- und Schiffbau (VWS) eingehend zu testen. In den vorangegangenen Erprobungen wurden alle Teilsysteme des Magazins in Betrieb genommen und manuelle Ein- und Ausdockversuche erfolgreich durchgeführt. Darauf aufbauend erfolgten nun Tests der entwickelten Methoden und Algorithmen zur Bewegungsregelung des ROVs, zur optischen ROV-Lokalisierungslösung und zum automatisierten Ein- und Ausdocken. Das ROV-Magazin sowie das automatische Docking wurden den Projektpartnern sowie den anwesenden Vertretern des Projektträgers Jülich beim anschließenden gemeinsamen Projekttreffen in der VWS vorgeführt.

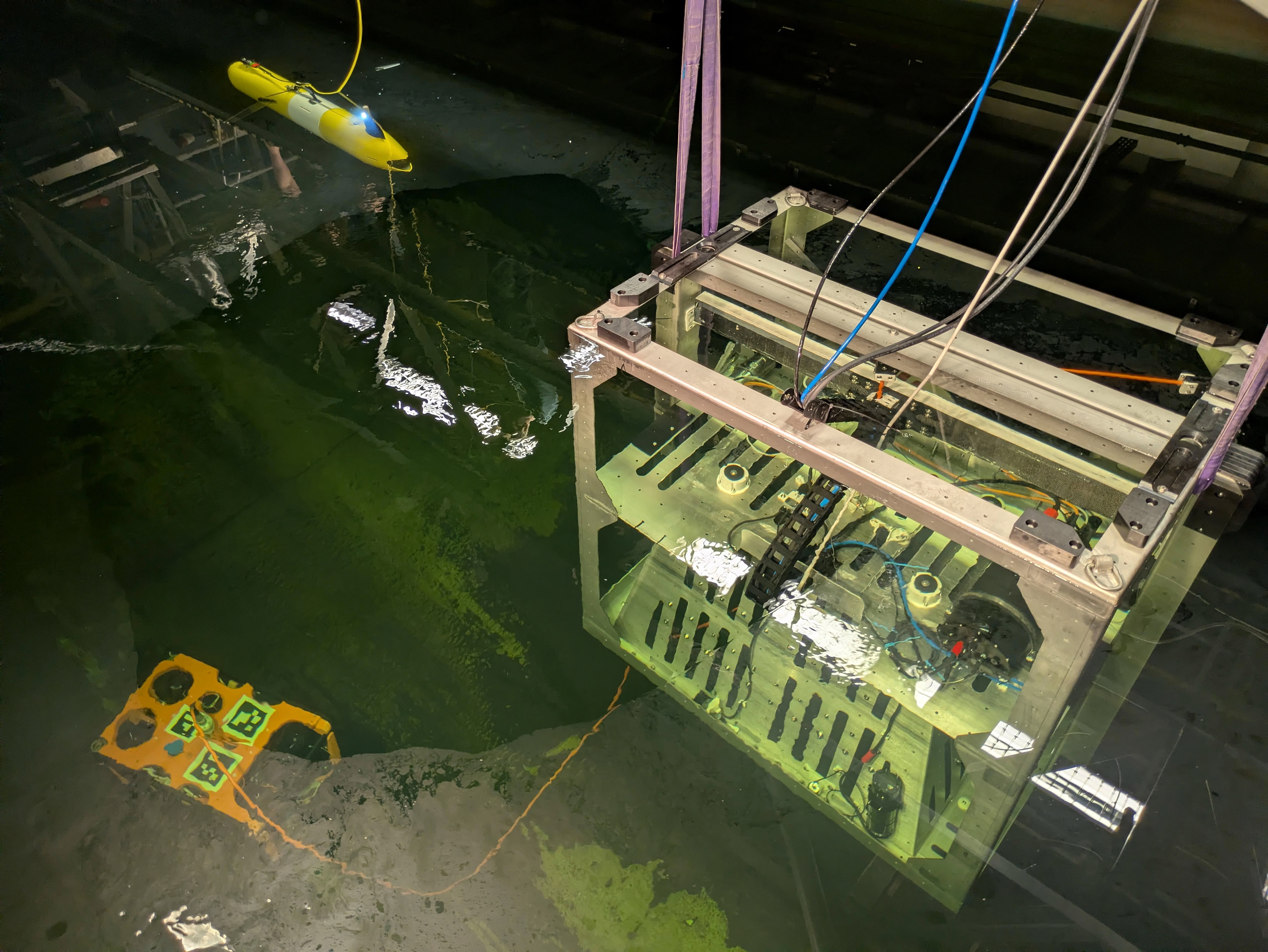

Die Gleitergruppe aus dem Projekt Base2Swarm nutzte die Gelegenheit, den im Vorgängerprojekt entwickelten Gleiter unter den klimatisch günstigen Bedingungen der VWS zu erproben. Ergaben die vorherigen Tests in der Ostsee und am Pagenwerder, dass der Gleiter grundsätzlich dazu in der Lage ist, auf ebenem Kiel zu gleiten, ging es nun darum, den Gleitflug unter Laborbedingungen zu optimieren und Algorithmen zur automatischen Ballastierung und Trimmung zu testen. Trotz der für einen Gleiter geringen Wassertiefe von bis zu 4 Metern konnte der Gleitflug auf ebenem Kiel hier eindrucksvoll vorgeführt werden und aufgrund der guten optischen Bedingungen auch jederzeit durch die Forscher überwacht werden. Auch die Unterstützung durch die Kollegen der TU Berlin trug wesentlich dazu bei, dass die von den Erbauern des Gleiters gesteckten Ziele erreicht und teilweise übertroffen werden konnten. Dafür gilt den Kollegen unser tiefer Dank.

Neues Buchkapitel veröffentlicht bei Springer Nature
Wir freuen uns mitzuteilen, dass das Fachbuch „Process Monitoring, Fault Diagnosis, and Tolerant Control for Complex Industrial Systems“ nun offiziell bei Springer Nature veröffentlicht wurde und als Open-Access-eBook frei zum Download bereitsteht.
Der Lehrstuhl Regelungstechnik war mit dem folgenden Beitrag vertreten:
Kapitel 10
Adaptive Neural Fault-Tolerant Observer-Based Stabilization of Uncertain MIMO Time-Delay Nonlinear Systems with Dead-Zones and Faults in Actuators
Reza Shahnazi, Torsten Jeinsch, Adel Haghani
Das Buch ist ab sofort online verfügbar:
- eBook ISBN: 978-981-96-9033-6
- Print ISBN: 978-981-96-9032-9
Das komplette eBook kann kostenlos über die Springer-Nature-Plattform heruntergeladen werden.
https://link.springer.com/content/pdf/10.1007/978-981-96-9033-6.pdf
https://link.springer.com/download/epub/10.1007/978-981-96-9033-6.epub
Wir danken Springer Nature für die Zusammenarbeit und freuen uns, dass unser Kapitel nun einem internationalen Publikum offensteht.
Übergabe der Förderbescheide für das Verbundprojekt „ModularShipAssist 2“
Mit dem Start von sechs neuen IHATEC-Verbundprojekten zum 1. Dezember 2025 setzt das Bundesministerium für Digitales und Verkehr ein starkes Signal für die Innovationskraft der deutschen Hafenwirtschaft. Parlamentarischer Staatssekretär Christian Hirte überreichte den beteiligten Forschungskonsortien im Rahmen einer gemeinsamen Veranstaltung die Förderurkunden und würdigte deren Beiträge zur Zukunftsfähigkeit der maritimen Logistik.
Eines der neuen Projekte ist „ModularShipAssist 2 – Autonom und kooperativ agierende Module zur kommandierten Schiffsassistenz in Häfen“, das vom Bundesministerium mit rund 2,6 Millionen Euro gefördert wird. Beteiligt sind die Fairplay Schleppdampfschiffs-Reederei Richard Borchard GmbH, die J.M. Voith SE & Co. KG | VTA, die Technische Universität Hamburg sowie die Universität Rostock (Lehrstuhl Regelungstechnik).
Aufbauend auf den erfolgreichen Ergebnissen des Vorgängerprojekts entwickelt das Konsortium das modulare Assistenzsystem konsequent weiter, mit dem Ziel, Schiffsmanöver im Hafen künftig sicherer, effizienter und zuverlässiger zu unterstützen. Neue Funktionen zur hochauflösenden Umfelderkennung, zur intelligenten Missionsplanung und zum Energiemanagement sollen zukünftig einen robusten Betrieb auch unter komplexen Bedingungen ermöglichen.
Mit „ModularShipAssist 2“ entsteht ein wichtiger Baustein für die sichere Integration autonomer und hochautomatisierter Schiffe in Hafenprozesse und gleichzeitig eine wirtschaftlich tragfähige Ergänzung zu klassischen Schleppereinsätzen.
Weitere Informationen zu den IHATEC-Projekten finden Sie unter:
www.innovativehafentechnologien.de






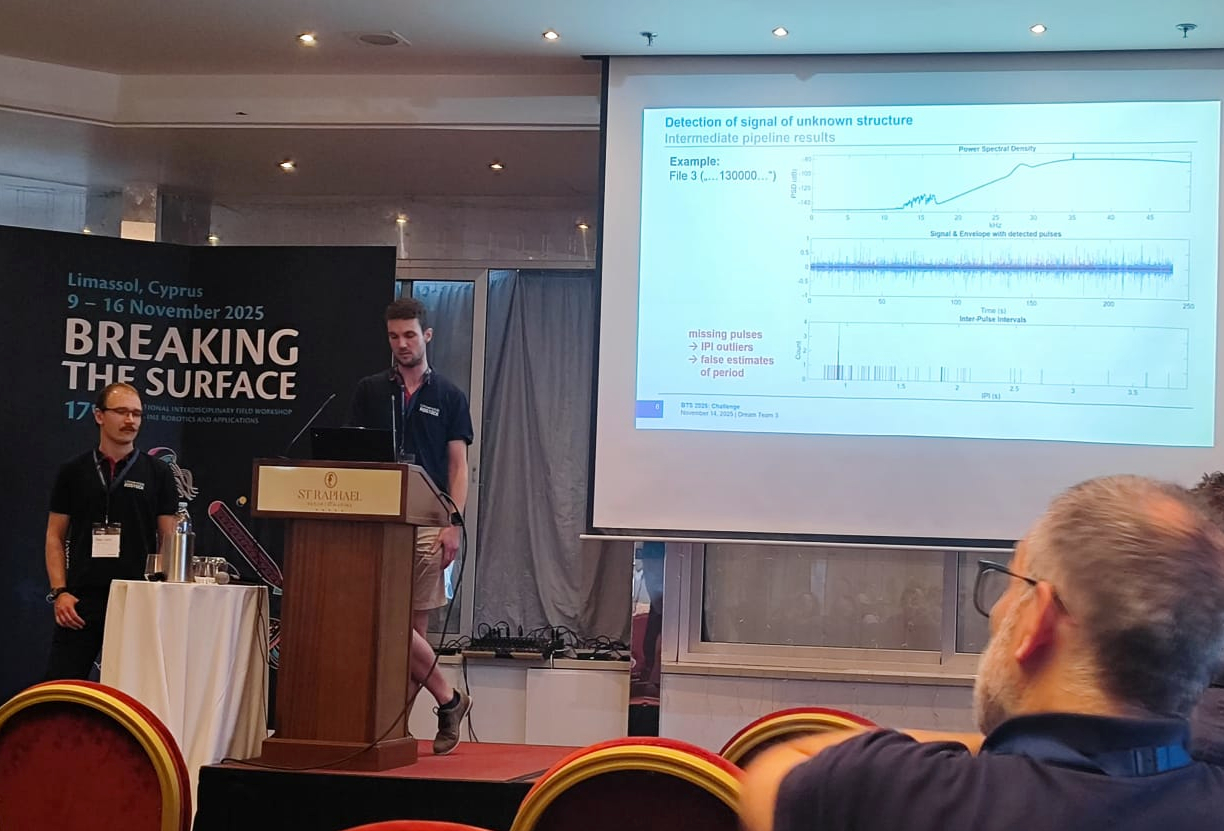
„Breaking the Surface“ BTS 2025

Der bereits zum siebzehnten Mal ausgerichtete internationale Workshop „Breaking the Surface“ fand in diesem Jahr erstmalig in Limassol, Zypern im Zeitraum vom 9. bis zum 16. November statt. Seit Jahren bringt der Workshop Experten aus den Bereichen maritime Robotik, Meeresbiologie, Meeresarchäologie, Meeresgeologie sowie maritime Sicherheit zusammen. Carsten Rethfeldt und Sven Lack von Lehrstuhl für Regelungstechnik der Universität Rostock nutzten die Veranstaltung intensiv zum fachlichen Austausch und konnten durch die zahlreichen Vorträge internationaler Gäste wertvolle Einblicke in aktuelle Forschungsarbeiten, technologische Entwicklungen und zukünftige Trends im maritimen Umfeld gewinnen.
Am Rande des Workshops fand die „Detection of Underwater Acoustic Signals Challenge“ statt. Ziel dieses Wettbewerbs war es, unter Wasser übertragene akustische Signale im realen Umfeld zu detektieren sowie deren Eigenschaften zu analysieren und auszuwerten. In einem sehr starken internationalen Teilnehmerfeld fiel die Entscheidung äußerst knapp aus, dennoch konnte sich das Team der Universität Rostock am Ende erfolgreich durchsetzen und den Wettbewerb für sich entscheiden.


Erprobung moderner Sensorik für die Fährautomatisierung
Am 16. Oktober wurden im Rahmen des Projekts WarnowstromerAI auf dem Warnowstromer umfangreiche Tests durchgeführt, um Sensoriklösungen für die zukünftige Automatisierung des Fährbetriebs unter realen Einsatzbedingungen zu erproben.
Der Schwerpunkt der Versuche lag diesmal auf dem Nahbereich, insbesondere auf Szenarien rund um das automatisierte Anlegen. Zum Einsatz kamen modernste LiDAR-, Radar- und Kamerasysteme, die in Kombination eine präzise Erfassung der Umgebung ermöglichen. Zusätzlich wurde eine markerbasierte Positionsbestimmung im Bereich des Anlegers getestet.
Die Tests fanden unter wechselhaften Wetterbedingungen statt, von strahlendem Sonnenschein bis zu dichter Bewölkung. Diese Vielfalt erwies sich als besonders wertvoll, da sie Rückschlüsse auf die Zuverlässigkeit der Sensorik unter unterschiedlichen Lichtverhältnissen ermöglicht.
Die dabei gewonnenen Daten bilden eine wichtige Grundlage für die weitere Entwicklung, Kalibrierung und Validierung der Systeme im Rahmen der Fährautomatisierung.



Vorträge auf der 8th International Conference on Autonomous Surface Ships (ICMASS) 2025


Die 8. INTERNATIONALE KONFERENZ ÜBER AUTONOME SEESCHIFFE (ICMASS) zusammen mit dem 1. SYMPOSIUM ÜBER INTELLIGENTE UND SMARTE SCHIFFFAHRT (ISSS) fand vom 8. bis 9. Oktober 2025 in Hamburg statt und wurde gemeinsam von der Deutschen Gesellschaft für Ortung und Navigation (DGON) und dem Fraunhofer CML ausgerichtet.
Im Rahmen der Konferenz wurden Themen zu technischen und regulatorischen Anforderungen an den Betrieb autonomer Schiffe, zu Herausforderungen für Häfen und Terminals bis hin zu Innovationen in der Navigation beim Umgang mit anderen Schiffen und Objekten im Wasser präsentiert und diskutiert.
Unser Lehrstuhl war mit zwei Beiträgen vertreten:
Der Beitrag Automated Maneuvering of Networked Vessels in Confined Waters wurde von Nick Eisenblätter und Tim Rehbronn (RWTH Aachen) präsentiert und ist unter DOI 10.1088/1742-6596/3123/1/012020 verfügbar.
Der Beitrag Bridging XLUUV and MASS – Technologies for Autonomous Multi-Domain Operations wurde von Carsten Rethfeldt präsentiert und ist unter DOI 10.1088/1742-6596/3123/1/012019 verfügbar.
Test von skalierten Schleppmodulen im Hafen von Rostock im Rahmen des Projekts ModularShipAssist

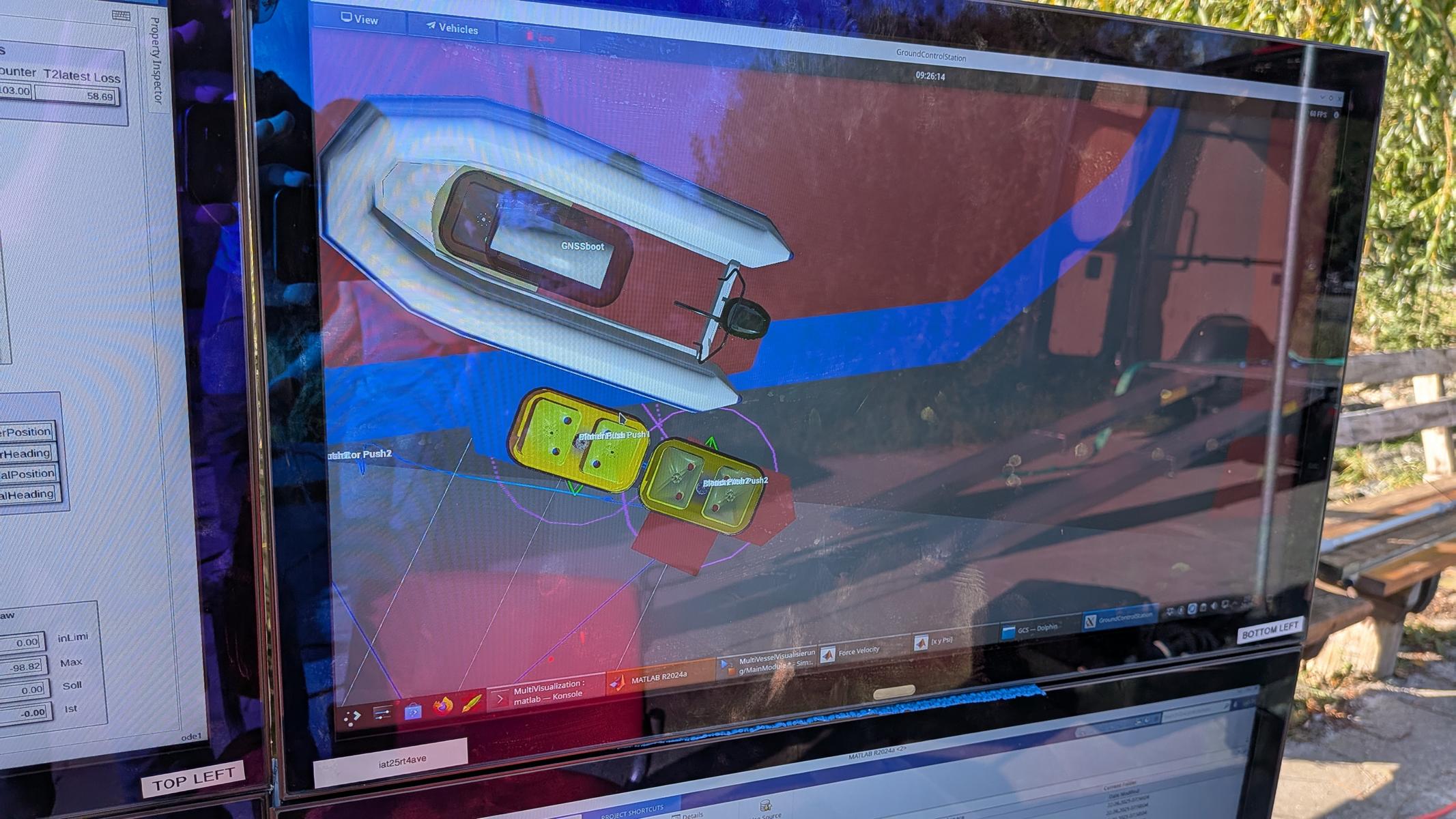
Das Ziel des Projekts ModularShipAssist (https://www.rt.uni-rostock.de/forschung/aktuelle-projekte/modularshipassist/) ist die Entwicklung eines autonomen, modularen Assistenzsystems, das aus einer variablen Anzahl elektrisch angetriebener Schleppermodule besteht. Die Module sollen Hafenlotsen oder Kapitänen der unterstützten Schiffe eine einfache und intuitive Hilfe beim Manövrieren im Hafen bieten.
In der aktuellen Projektphase werden die Fähigkeiten des entwickelten Assistenzsystems im Modellmaßstab unter realen Bedingungen im Hafen von Rostock getestet.
Wir danken dem Bundesministerium für Verkehr und dem Projektträger TÜV Rheinland für die Förderung und unseren Projektpartnern Voith, Technische Universität Hamburg sowie der Fairplay Towage Group und der Hafenlotsenbrüderschaft Hamburg für die Unterstützung.
Schaut euch auch das aktuelle Video zu den Tests vom 24.09.2025 auf unserem YouTube Kanal an: https://youtu.be/oVAkScgb8-Y
Teilnahme am VDI/VDE-GMA-FA 2.14 Systemtheorie und Regelungstechnik
Vom 15. bis 17. September 2025 fand der GMA-Fachausschusses 2.14 Systemtheorie und Regelungstechnik in Anif/Salzburg, Österreich, statt.
Die thematischen Schwerpunkte des GMA-Fachausschusses 2.14 betreffen aktuelle Entwicklungen der Systemtheorie und Regelungstechnik sowie deren Anwendung im industriellen Umfeld. Aktuelle Schwerpunkte sind
- Modellprädiktive Regelungen dynamischer Systeme
- Nichtlineare Beobachter
- Regelung vernetzter und verteilt-parametrischer Systeme
- Datenbasierte Regelungen.
In diesem Jahr wurde der Lehrstuhl für Regelungstechnik der Universität Rostock durch Reza Shahnazi mit der Vorstellung des Papers „Observer-based Funnel Heading Control with Prescribed Settling Time for Ships: Addressing Rudder Dynamics and Saturation“ vertreten.


Promotionsverteidigung Dr.-Ing. Sven Lack

Am 11. September 2025 verteidigte Herr Dr.-Ing. Sven Lack erfolgreich seine Dissertationsschrift zum Thema „Beitrag zur Regelung getauchter Mehrkörpersysteme“ an der Fakultät für Informatik und Elektrotechnik der Universität Rostock.
Mitglieder der Promotionskommission waren: Prof. Kühn (Vorsitzender) - Universität Rostock, Prof. Jeinsch - Universität Rostock, Prof. Dünow - Hochschule Wismar, Prof. Kosleck – Universität Rostock, Prof. Thurow - Universität Rostock, Prof. Gräser - Universität Rostock, Prof. Fellmann - Universität Rostock.
Herzlichen Glückwunsch!
Erprobung im Projekt A-SWARM II bei Behala in Berlin

Vom 1. bis 5. September 2025 fand im Rahmen des Forschungsvorhabens A-SWARM II eine gemeinsame Erprobung auf dem Gelände unseres Projektpartners BEHALA in Berlin statt. Neben BEHALA waren auch die Projektpartner SVA und Veinland beteiligt.
Im Mittelpunkt der Testwoche stand die Inbetriebnahme des ersten Versuchsträgers im Hafenbecken der BEHALA. Dabei wurden zentrale Systemfunktionen erfolgreich erprobt. Die installierte Technik ermöglicht die Ansteuerung der Motoren, eine präzise Umfelderkennung sowie den Remote-Zugriff auf das Fahrzeug – und schafft damit die Grundlage für die weitere Automatisierung des Systems.
Die gemeinsame Erprobung bot allen Beteiligten die Gelegenheit, das Zusammenspiel der verschiedenen Systemkomponenten direkt vor Ort zu testen, zu optimieren und wertvolle Erfahrungen für die kommenden Projektphasen zu sammeln.






Teilnahme an der 16th IFAC CAMS 2025 Konferenz in Wuhan, China

Vom 25. bis 28. August 2025 fand die 16th IFAC Conference on Control Applications in Marine Systems, Robotics and Vehicles (CAMS) an der Huazhong University of Science and Technology (HUST) in Wuhan, China, statt.
Die CAMS zählt zu den führenden internationalen Konferenzen im Bereich der maritimen Regelungstechnik und widmete sich in diesem Jahr dem Thema „Intelligent Marine Systems Driven by Blue Economy“.
Der Lehrstuhl für Regelungstechnik der Universität Rostock war in diesem Jahr mit Beiträgen von Enrico Gutwald, Martin Gülland und Reza Shahnazi vertreten.
Enrico Gutwald präsentierte in der Session „Marine Perception“ das Paper „LiDAR-Based Pose and Extension Estimation of Maritime Vessels“.
In der Session „Marine Vehicle Docking“ stellte Martin Gülland das Paper „Experimental Evaluation of Fiducial Marker-Based Localization Method for ROV Docking“ vor.
Torsten Jeinsch präsentierte in der Session „GNC for Marine Vehicles“ das Paper „Observer-Based Funnel Heading Control with Prescribed Settling Time for Ships: Addressing Rudder Dynamics and Saturation“.



29. International Conference on Methods and Models in Automation and Robotics (MMAR 2025)
Vom 26. Bis 29. August fand die diesjährige Ausgabe der International Conference on Methods and Models in Automation and Robotics (MMAR 2025) statt. Im Austragungsort Misdroy (Polen) kamen über hundert Teilnehmer zusammen, um neue Entwicklungen und Forschungsergebnisse zu präsentieren und diskutieren. Vom Lehrstuhl Regelungstechnik nahm Alexander Schöley mit dem Beitrag „Challenges of Hamilton-Based Stability Investigation of Grid-Tied Inverters“ teil. Wir freuen uns auf die 30. Ausgabe der MMAR im kommenden Jahr!


Buch "Maritime Regelungs- und Sensorsysteme: Automatisierte Schiffsführung – mit MATLAB® und Simulink®"

Seit dem 5. August 2025 ist die 2. überarbeitete Auflage des Buches Maritime Regelungs- und Sensorsysteme (Link: link.springer.com/book/10.1007/978-3-658-47579-6) von Jürgen Majohr und Martin Kurowski im Springerverlag erschienen.
Das Buch beschreibt die erforderlichen Grundlagen für den Entwurf und die Anwendung maritimer Regelungssysteme. Unter Verwendung moderner Methoden der Modellbildung und der Regelungstheorie erfolgt die Behandlung von Navigationssystemen und Sensoren, Regelungsstrukturen und Assistenzsystemen bis hin zu einem neuentwickelten Manöverregelungssystem. Der methodisch dargestellte Stoff wird durch eine Vielzahl von mit MATLAB® und Simulink® erstellten Rechenbeispielen und Simulationen auf der Basis von Borddaten anschaulich interpretiert.
Das Buch schließt eine vorhandene Lücke in der deutschsprachigen Literatur zu maritimen Regelungs- und Sensorsystemen und wendet sich an Ingenieure, Mitarbeiter und Seefahrtpraktiker in allen
Zweigen der Seewirtschaft und ihrer Zulieferindustrie. Auch Ingenieuren und Praktikern in der Automatisierungstechnik, Elektrotechnik und Informatik kann der Titel Anregungen für den Entwurf von Regelungs- und Sensorsystemen sowie zur Einarbeitung in die Satellitennavigationstechnik geben. Lehrenden und Studierenden an Aus- und Weiterbildungseinrichtungen in den genannten Fachbereichen kann das Buch als Nachschlagewerk empfohlen werden.
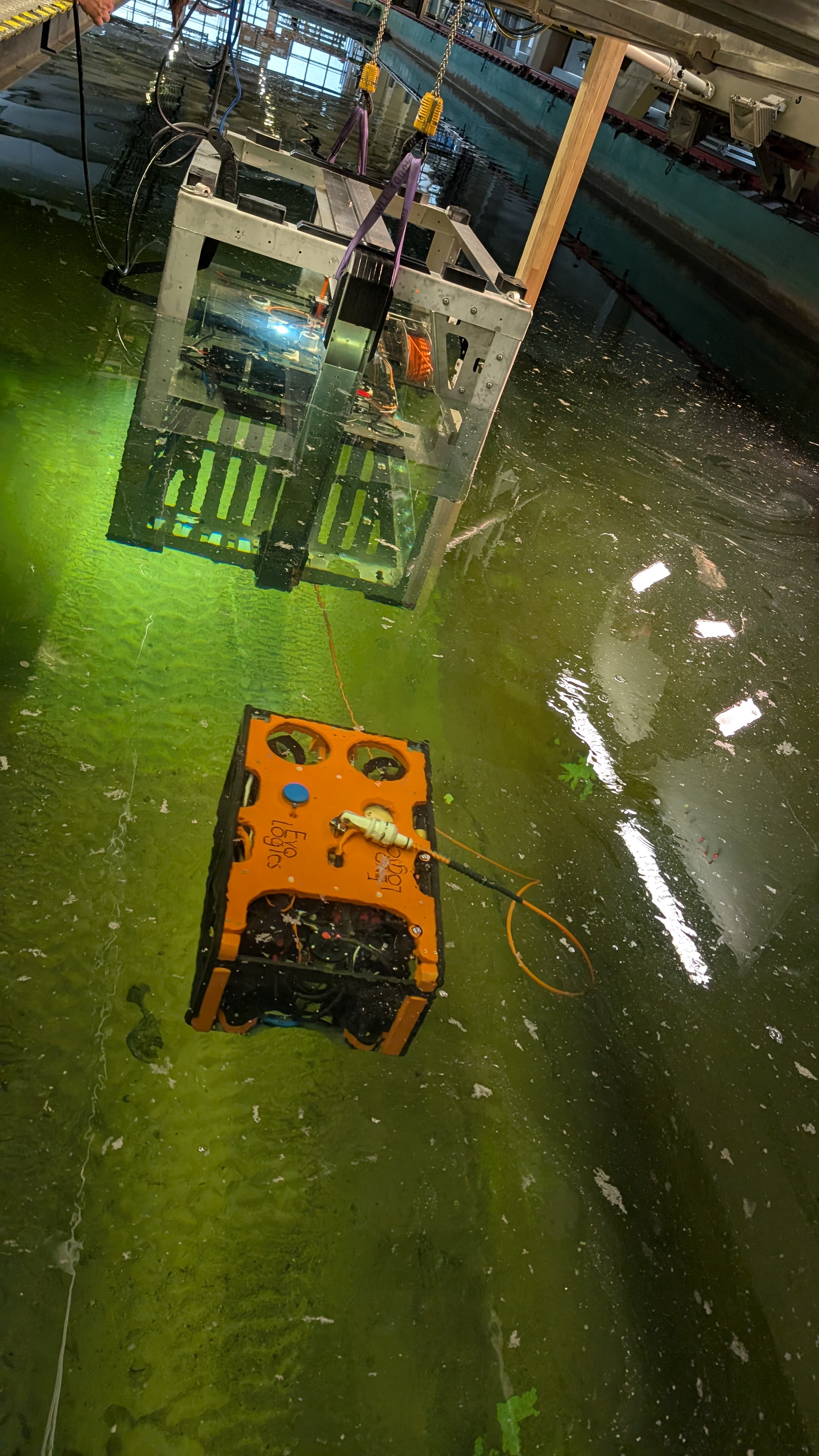
Erprobung zur Automatisierung eines ROV-Magazins
Vom 18. bis 22. August waren Mitarbeiter des Lehrstuhls Regelungstechnik am Fachgebiet Entwurf und Betrieb maritimer Systeme der Technischen Universität Berlin zu Gast. In der Versuchsanstalt für Wasser- und Schiffbau (VWS) wurden Experimente mit einem ROV (Remotely Operated Vehicle) durchgeführt. Ziel war die Erprobung der Automatisierung eines ROV-Magazins, in das das Fahrzeug künftig selbstständig ein- und ausdocken soll.
Die Tests fanden im Rahmen des MUM-Projekts (https://mum-project.de) statt. In diesem Projekt entsteht in Zusammenarbeit mit den Partnern TKMS, TKMS ATLAS ELEKTRONIK GmbH, EvoLogics GmbH, DLR e.V. und Fraunhofer ein extra großes unbemanntes Unterwasserfahrzeug (XLUUV). Das ROV-Magazin wird ein Modul dieses XLUUV bilden und zusammen mit dem ROV den autonomen Einsatz für zivile Missionen ermöglichen.

Nachruf

Am 14. August 2025 verstarb unser hochgeschätzter Kollege und Freund
Prof. Dr. sc. techn. h. c. Efim Natanovich Rosenwasser
im Alter von 93 Jahren.
Mit ihm verlieren wir einen herausragenden Wissenschaftler, geachteten Hochschullehrer und liebenswerten Menschen.
Das Wirken von Efim Natanovich Rosenwasser als Mathematiker und Regelungstechniker war über viele Jahrzehnte international prägend. Seine grundlegenden Beiträge zur Theorie der digitalen Regelung fanden frühzeitig hohe weltweite Anerkennung.
Seit den 1990er Jahren bis hinein ins hohe Alter war sein Wirken in besonderer Weise mit der Universität Rostock verbunden. Die von ihm initiierten Projekte und die zahlreichen gemeinsamen Veröffentlichungen trugen entscheidend dazu bei, die Sichtbarkeit der Rostocker Regelungstechnik auf der internationalen Bühne zu stärken. Aufgrund seiner Verdienste wurde ihm 2002 die Ehrendoktorwürde der Universität Rostock verliehen.
Neben seiner wissenschaftlichen Brillanz zeichnete ihn seine menschliche Bescheidenheit, Wärme und Kollegialität aus.
Wir werden Efim Natanovich als begeisterten Wissenschaftler, geschätzten Kollegen und guten Freund in Erinnerung behalten. Sein Andenken und sein wissenschaftliches Erbe werden weiterleben.
Seiner Familie gilt unser tief empfundenes Mitgefühl.
Kolleginnen und Kollegen des Instituts für Automatisierungstechnik der Universität Rostock
Messkampagne im Rahmen des Projekts A-SWARM II in Kooperation mit Deutsche Post DHL

Am 30. Juli 2025 fand im Rahmen des Forschungsprojekts A-SWARM II eine gemeinsame Messkampagne mit unserem Projektpartner Deutsche Post DHL in Berlin statt. Für diesen Zweck stellte DHL ihr Solarboot zur Verfügung, auf dem ein Versuchsaufbau mit LiDAR-Sensor, GNSS-Kompass und Kamera installiert wurde.
Ziel der Messfahrt war die Erhebung von LiDAR- und GNSS-Daten im Berliner Stadtgebiet entlang der geplanten Erweiterung der Solarboot-Route. Die gewählte Strecke zeichnet sich durch zahlreiche Brücken, enge Flussabschnitte sowie eine vielfältige Ufergestaltung aus und bietet somit ideale Bedingungen zur Weiterentwicklung und Validierung LiDAR-gestützter Navigationsfilter.


Konsortialtreffen im Verbundprojekt StruMan

Am 01. Juli durfte der Lehrstuhl Regelungstechnik das gesamte Konsortium des Projektes StruMan im Anwendungszentrum Regelungstechnik zum vierten Konsortialtreffen begrüßen. Neben den organisatorischen und inhaltlichen Abstimmungen zum weiteren Projektverlauf lag der Fokus besonders auf dem Interfacetest vom Regelungssystem zum Schiffssteuerungs- und Sensorsystem, welcher mit gutem Erfolg abgeschlossen werden konnte.
Zum 31. August diesen Jahres steigen zum geplanten Projektende sowohl die SICK AG als auch der Lehrstuhl für Modellbildung und Simulation der Universität Rostock aus dem Projekt aus. Wir bedanken uns für die fruchtbare Zusammenarbeit! Der Rest des Konsortiums konnte das Projekt kostenneutral bis Ende 2026 verlängern, um die Arbeiten insbesondere im Zusammenhang mit dem Versuchsträger „Archimedes“ abzuschließen.
Erprobung im Projekt A-SWARM II bei Behala in Berlin
Vom 23. bis 27. Juni 2025 fand im Rahmen des Forschungsvorhabens A-SWARM II eine gemeinsame Erprobung auf dem Gelände unseres Projektpartners Behala in Berlin statt. Beteiligt waren neben Behala auch die Projektpartner SVA und Veinland. Im Rahmen der Erprobung wurde der erste Versuchsträger erfolgreich mit Rechen- und Kommunikationstechnik sowie Antriebskomponenten und Sensorik ausgestattet. Die verbaute Technik ermöglicht die Ansteuerung der Motoren, eine präzise Umfelderkennung sowie den Remote-Zugriff auf das Fahrzeug und bildet damit die Grundlage für die Automatisierung des Fahrzeugs. Während der Woche stand die Inbetriebnahme des Systems unter trockenen Bedingungen im Mittelpunkt, bei der zentrale Funktionen erfolgreich überprüft werden konnten. Die Erprobung bot zudem die Gelegenheit, das Zusammenspiel der einzelnen Systemkomponenten gemeinsam mit den Projektpartnern vor Ort zu testen und weiter abzustimmen.



Abschlussveranstaltung des Projekts SensorSOW in Wildau

Am 26 Juni 2025 fand im Zentrum für Luft- und Raumfahrt III in Wildau die Abschlussveranstaltung des Projekts SensorSOW statt. Nach zweieinhalb Jahren intensiver Zusammenarbeit wurde das Projekt „SensorSOW – Bordseitige Sensorik und Assistenzsysteme für die automatisierte Binnenschifffahrt auf der Spree-Oder-Wasserstraße“ offiziell abgeschlossen.
Gemeinsam haben die Alberding GmbH, das Fachgebiet Entwurf und Betrieb Maritimer Systeme der TU Berlin sowie das Institut für Automatisierungstechnik der Universität Rostock innovative Technologien zur hochpräzisen Erfassung von Schiff und Umgebung – über und unter Wasser – entwickelt und erprobt.
Unser Ziel: Mehr Sicherheit, Effizienz und Automatisierung auf unseren Binnenwasserstraßen.
- Die wichtigsten Projektergebnisse im Überblick:
LiDAR-basierte Echtzeit-Prädiktion der Fahrwege anderer Verkehrsteilnehmer (Universität Rostock) - Echtzeit-Sonarsystem zur präzisen Fahrrinnenerfassung (TU Berlin)
- Kombinierte Sensoreinheit zur exakten Schiffslagebestimmung und ein integriertes Assistenzsystem (Alberding GmbH)
Wir freuen uns über die erzielten Ergebnisse! Die entwickelten Systeme sind ein wichtiger Schritt in Richtung automatisierte und vernetzte Binnenschifffahrt – und fließen direkt in Nachfolgeprojekte wie DigitalSOW2 ein, das im Januar 2025 mit denselben Projektpartnern gestartet wurde.
Unser besonderer Dank gilt allen Projektbeteiligten sowie dem Bundesministerium für Digitales und Verkehr (BMDV) und der Bundesanstalt für Verwaltungsdienstleistungen (BAV) für die Förderung sowie die fachliche und administrative Begleitung im Rahmen von DTW II.
Abschlussveranstaltung GALILEOnautc 2plus

Im exponierten Deneb-Saal des BSH Rostock wurde am 24. Juni 2025 die Abschlussveranstaltung zum Projekt GALILEOnautic 2plus durchgeführt. Für das hybride Format kamen neben den Projektpartnern von der RWTH Aachen und dem Institut für Automatisierungstechnik von der Universität Rostock Vertreter des assoziierten Partners BSH als Eigner des Forschungsschiffs DENEB, der ISSIMS GmbH und des Projektträgers DLR Raumfahrtagentur sowie weitere Gäste zusammen. Die Projektpartner konnten in Vorträgen ihre umfassenden Ergebnisse zu den notwendigen Einzelmodulen für das optimierte, kooperative, automatische Manövrieren in sicherheitskritischen Bereichen vorstellen, in das im Hafen drei Fahrzeuge im involviert waren. Die RWTH hat sich vorrangig mit der optischen Umfelderkennung mittels Lidar und Radar befasst und dazu innovative Methoden entwickelt. Der Lehrstuhl Regelungstechnik der Universität Rostock lieferte:
- die Szenario- und Systemkonzeption,
- die Optimierung zur Berechnung der Ausweichtrajektorien für die Kollisionsvermeidung und
- die Regelung, um jedes Fahrzeug auf seiner Trajektorie zu halten, wobei jeweils ein nichtlinearer, modellprädiktiver Regler eingesetzt wurde.
Auszugsweise wurde von den verschiedenen, erfolgreich absolvierten Manövern berichtet. Im Anschluss wurde in großer Runde diskutiert, wie Assistenz- und Automationssysteme in der Schifffahrt forciert eingesetzt sowie maritime Forschung und Industrieentwicklungen besser verzahnt werden können.
Wir möchten uns ausdrücklich bei den genannten Institutionen für die Unterstützung und ausgezeichnete Zusammenarbeit bedanken, insbesondere bei Crew der DENEB, die den erfolgreichen Projektabschluss durch ihren ideenreichen und kompetenten Einsatz überhaupt erst ermöglicht hat, sowie für die Förderung durch das Bundesministerium für Wirtschaft und Energie.



2. Fachkonferenz „Neue Technologien und Testfelder für Wasserstraßen und Häfen”

Am 11. und 12. Juni 2025 fand die 2. Fachkonferenz „Neue Technologien und Häfen“ im Bundesministerium für Verkehr in Berlin statt.
Im Mittelpunkt der Veranstaltung standen technologische Entwicklungen in Häfen und auf Wasserstraßen. Schwerpunkte bildeten Maßnahmen zur Automatisierung und Digitalisierung sowie Erprobungsmöglichkeiten für Innovationen im Bereich der Binnenwasserstraßen und Hafeninfrastruktur.
Das Tagungsprogramm wurde maßgeblich von Forschungsthemen aus drei Förderprogrammen des Bundesministeriums für Wasserstraßen geprägt:
- Digitale Testfelder in Häfen (DigiTest),
- Digitale Testfelder Wasserstraßen (DTW) und
- Innovative Hafentechnologien (IHATEC).
Das Institut für Automatisierungstechnik stellte dem Fachpublikum die Forschungsprojekte WarnowstromerAI und DigitalSOW II im Rahmen von Kurzpräsentationen und an Projektständen vor.


Teilnahme an der ISOPE 2025 Konferenz in Seoul/Goyang
Vom 01. bis 06. Juni 2025 fand die internationale Konferenz ISOPE 2025 (International Society of Offshore and Polar Engineers) im Kintex Conference Center in Seoul/Goyang, Südkorea, statt. Die ISOPE-Konferenz ist eine der weltweit führenden Veranstaltungen im Bereich Offshore-, Meeres- und Polartechnik und bietet jährlich eine Plattform für den wissenschaftlichen Austausch zu innovativen Forschungsarbeiten aus den Bereichen Ozean-, Offshore-, Schiffbau-, Energie- und Umwelttechnik.
In diesem Jahr wurde der Lehrstuhl für Regelungstechnik der Universität Rostock durch Johannes Marx mit der Vorstellung des Papers
"Constrained Parameter Estimation for Ship Maneuvering Models to Increase Physical Reliability" vertreten.
Die vorgestellte Arbeit beschäftigt sich mit der zuverlässigen und physikalisch konsistenten Parameterschätzung für Manövriermodelle von Schiffen. Ziel ist es, die physikalische Aussagekraft solcher Modelle zu verbessern, insbesondere unter Berücksichtigung realer Randbedingungen.
Angesiedelt und gefördert im Projekt StruMan resultieren die Ergebnisse auch aus einer Zusammenarbeit unseres Lehrstuhls mit der Division of Maritime Studies der Chalmers University of Technology in Göteborg insbesondere vertreten durch Dr. Wengang Mao.


Abschlussveranstaltung des Projekts GN2plus: Autonomes Navigieren und kooperatives Manövrieren

Die Projektreihe GALILEOnautic widmet sich dem autonomen Navigieren und optimierten Manövrieren von kooperierenden Schiffen in sicherheitskritischen Bereichen.
Zum Abschluss des aktuellen Projekts GN2plus laden wir herzlich zur Abschlussveranstaltung am 24. Juni 2025 beim Bundesamt für Seeschifffahrt und Hydrographie (BSH) in Rostock ein. Im Rahmen der Veranstaltung präsentieren wir die Forschungsergebnisse anhand eines vernetzten, kooperativen Manövers rund um das automatisierte BSH-Forschungsschiff Deneb.
Bei Interesse an einer persönlichen oder virtuellen Teilnahme bitten wir um Anmeldung bis zum 13. Juni 2025.
Promotionsverteidigung Dr.-Ing. Robert Damerius

Am 28. Mai 2025 verteidigte Herr Dr.-Ing. Robert Damerius erfolgreich seine Dissertationsschrift zum Thema „Beitrag zur Bewegungsplanung autonomer Wasserfahrzeuge“ an der Fakultät für Informatik und Elektrotechnik der Universität Rostock.
Mitglieder der Promotionskommission waren: Prof. Eckel (Vorsitzender) - Universität Rostock, Prof. Rauh - Universität Oldenburg, Prof. Jeinsch - Universität Rostock, Prof. Fleischer – Universität Rostock, Prof. Damaschke - Universität Rostock, Jun.-Prof. Oehmcke - Universität Rostock und Prof. Salomon - Universität Rostock.
Herzlichen Glückwunsch!
StruMan – Manövrieren und Regelung von Schiffen in strukturnahen Bereichen

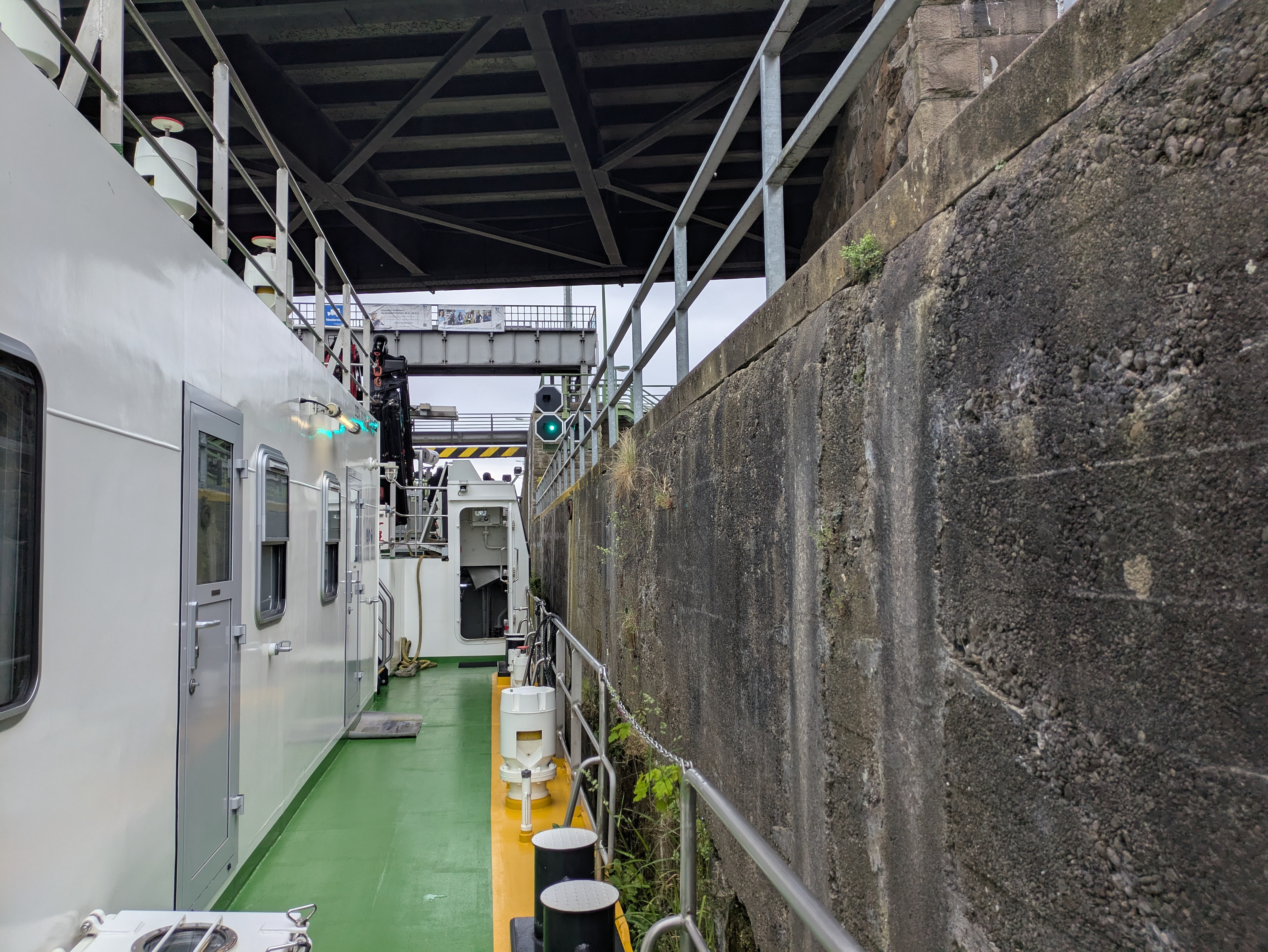
Am 27. Mai 2025 fand im Rahmen des Projekts StruMan eine gemeinsame Erprobung mit den Projektpartnern SICK AG und SCHOTTEL GmbH auf dem Taucherglockenschiff Archimedes statt.
Ziel der Erprobung war die Untersuchung von LiDAR-Technologien zur hochpräzisen Nahfelderkennung. Dabei wurden essenzielle Daten für die Weiterentwicklung autonomer Navigationssysteme für Binnenschiffe auf Wasserstraßen erhoben.
Die Tests wurden während einer Fahrt auf der Ruhr im Raum Duisburg bis zur Ruhrschleuse Raffelberg durchgeführt. Eine besondere Herausforderung stellte das präzise Manövrieren in strukturnahen Situationen dar, insbesondere beim An- und Ablegen sowie beim Ein- und Ausfahren aus der Schleuse.


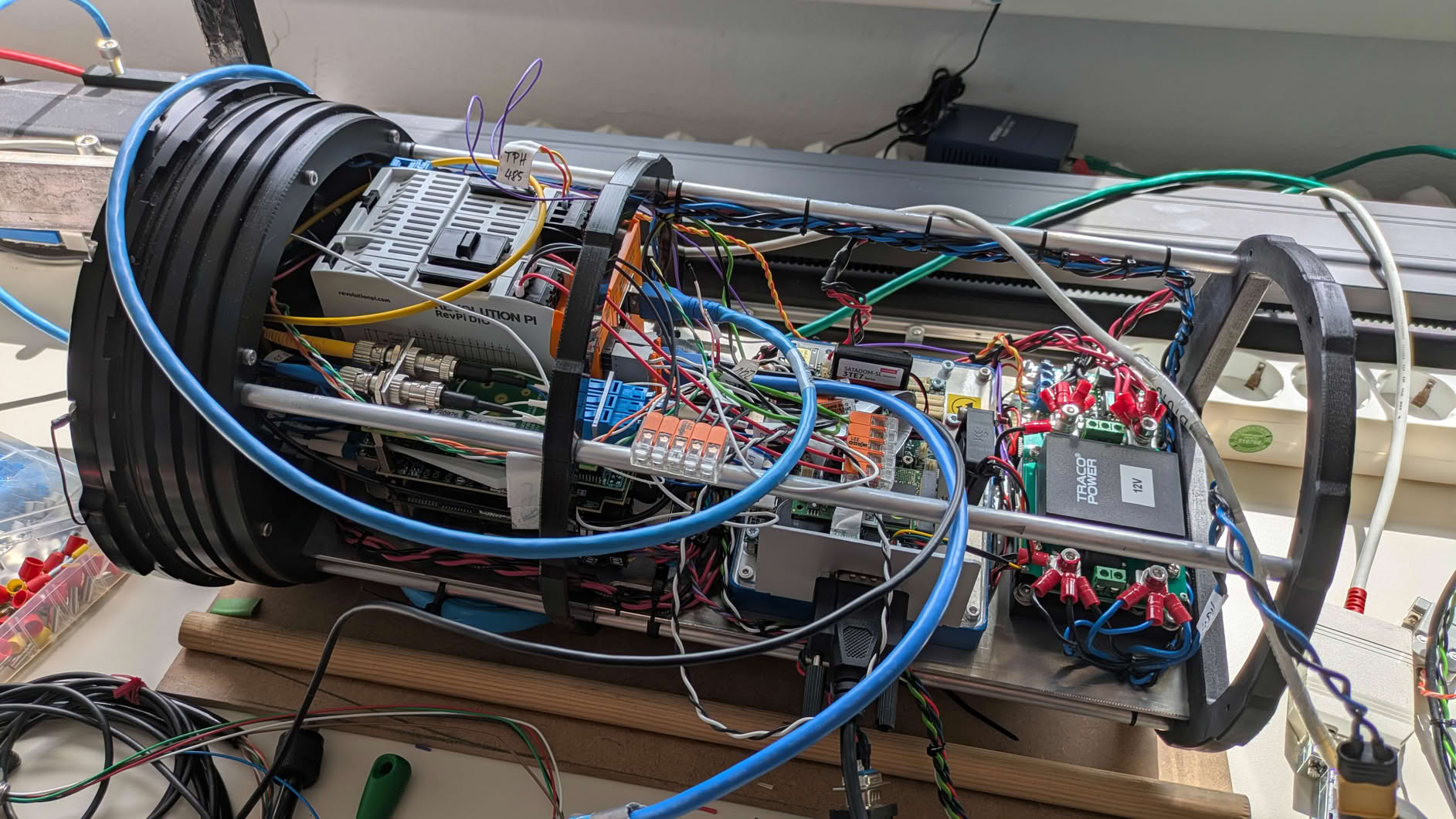
ROV-Magazin: Erfolgreiche Inbetriebnahme "im Trockenen"
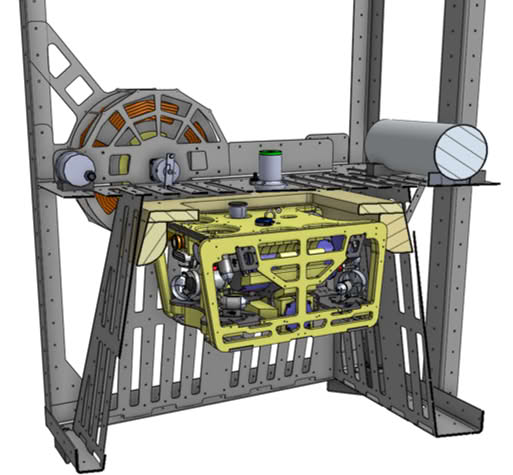
Vom 21.05. bis 23.05.2025 nutzten wir die Möglichkeit im Rahmen des MUM2 Projekts (Modifiable Underwater Mothership), gemeinsam mit den Kollegen der Technischen Universität in Berlin die stückweise Inbetriebnahme des ROV-Magazins durchzuführen. Das ROV-Magazin wird als Dock für das Remotely Operated Vehicle (ROV) des Lehrstuhls Regelungstechnik im MUM-Gesamtfahrzeug dienen und umfasst den mechanischen Aufbau sowie die Sensorik und Aktorik, die für den Betrieb, den Transport, sowie das Ein- und Ausdocken von Nöten ist. Das ROV wird als aktive Nutzlast im MUM-Trägerfahrzeug mitgeführt, um so die Durchführung von Unterwasserarbeiten, z.B. die Installation und Wartung von Unterwassersystemen zu ermöglichen. Das Ziel dieser ersten Erprobung des Magazins, die Steuerelektronik und das Tether-Management-System "im Trockenen" in Betrieb zu nehmen, konnten wir in bester Zusammenarbeit mit unseren Partnern der TU Berlin erreichen.

Automatisiertes Kooperationsmanöver im Hafen: Erfolgreiche GN2plus-Versuche an Bord der DENEB
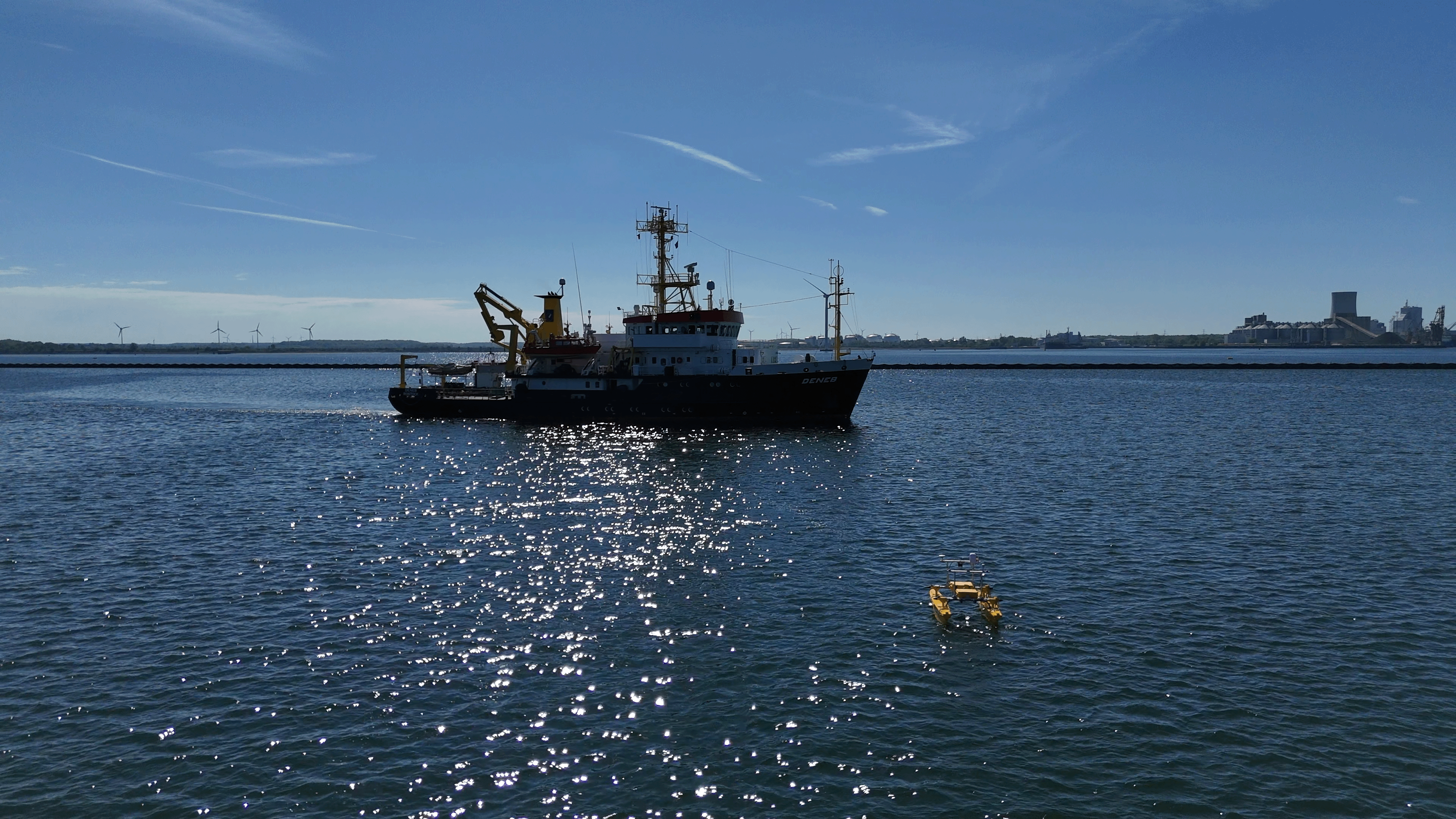
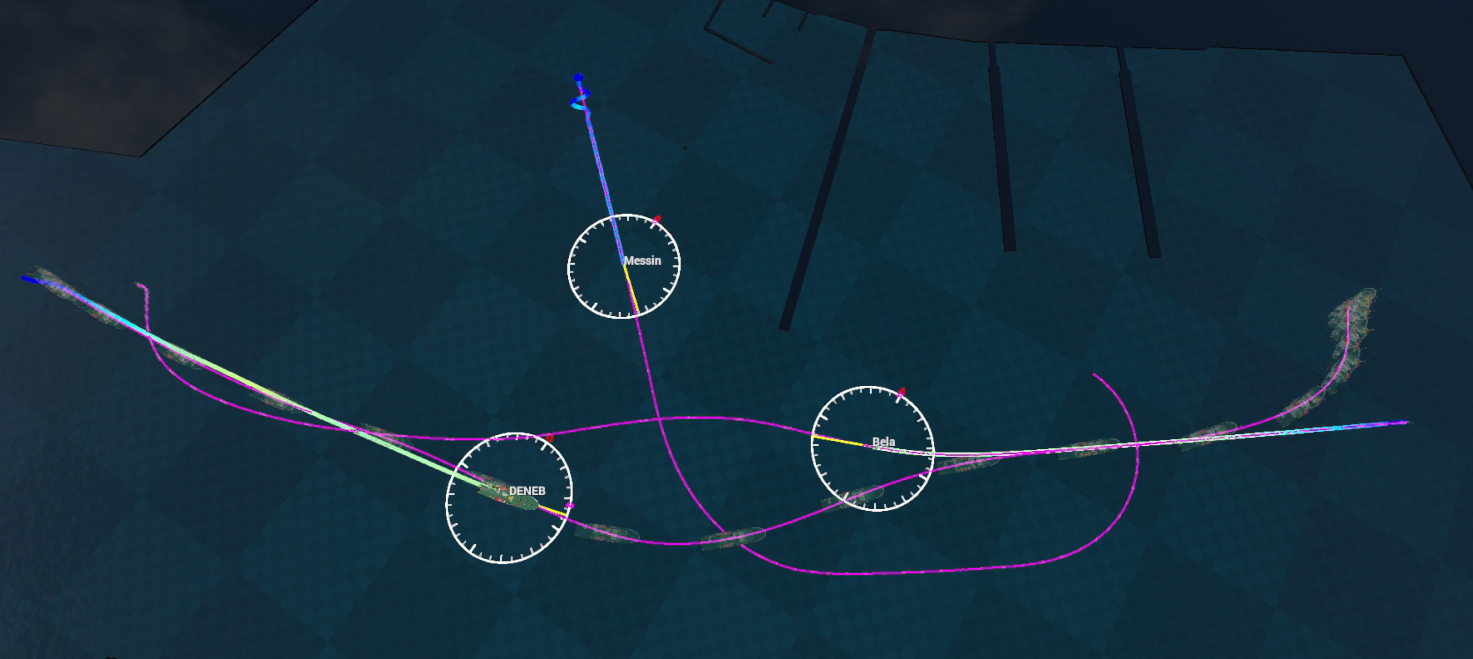
Vom 5. bis 10. Mai waren wir wieder einmal zu Gast an Bord des Forschungsschiffes DENEB des Bundesamtes für Seeschifffahrt und Hydrographie (BSH). Gemeinsam mit unserem unbemannten Fahrzeug Messin und einem weiteren virtuell operierenden Arbeitsboot führten wir ein automatisiertes kooperatives Hafenszenario durch. Dabei simulierten DENEB, Messin und die virtuelle Bernhard Lampe ein komplexes Begegnungs- und Kreuzungsszenario im Hafen von Rostock. Die nautische Relevanz und Übertragbarkeit wurde durch die Expertise der BSH-Kollegen sichergestellt – ein wesentlicher Beitrag zum Gesamtprojekt.
Ein interdisziplinäres Forschungsteam, bestehend aus dem Institut für Regelungstechnik der RWTH Aachen sowie dem Institut für Automatisierungstechnik der Universität Rostock, testete gemeinsam neueste Entwicklungen im Bereich Umgebungswahrnehmung und automatisierte Fahrzeugführung.
- Die RWTH Aachen übernahm die Umgebungswahrnehmung, inklusive Objektklassifizierung und -verfolgung mittels LiDAR und Radar.
- Die maritime Forschungsgruppe der Universität Rostock war verantwortlich für die fahrzeugübergreifende Trajektorienplanung sowie die Fahrzeugsteuerung durch nichtlineare Optimierung und modellprädiktive Regelung.
- Die zentrale Planung der Ausweichtrajektorien für alle drei Fahrzeuge erfolgte unter Berücksichtigung der örtlichen Hafenbeschränkungen sowie der COLREGs (Kollisionsverhütungsvorschriften) für das Hafengebiet.
Ein herzliches Dankeschön gilt der gesamten Besatzung der DENEB, sowohl über als auch unter Deck, für ihre großartige Unterstützung, die hilfreichen Diskussionen und wertvollen Hinweise, die zum Erfolg der Versuche beigetragen haben.
Die Versuche fanden im Rahmen des GN2plus-Projekts statt – unser Dank gilt dem DLR Projektträger für die finanzielle Förderung.

ModularShipAssist – Autonome und kooperative Module zur kommandierten Schiffsassistenz in Häfen

Vom 7. bis 13. April 2025 fand im Rahmen des Forschungsvorhabens ModularShipAssist eine gemeinsame Erprobung mit den Projektpartnern J.M. Voith SE & Co. KG | VTA sowie dem Institut für Fluiddynamik und Schiffstheorie der Technischen Universität Hamburg auf dem Gelände der Hamburgischen Schiffbau-Versuchsanstalt GmbH (HSVA) in Hamburg-Barmbek-Nord statt.
Das vom Bundesministerium für Verkehr und digitale Infrastruktur im Rahmen der Förderrichtlinie "Innovative Hafentechnologien II" geförderte Projekt ModularShipAssist verfolgt das Ziel, ein autonomes, modulares Assistenzsystem zu entwickeln. Dieses System besteht aus einer variablen Anzahl elektrisch angetriebener Schub- und Schleppermodule sowie einer mobilen Kommandozentrale.
Im Mittelpunkt der Erprobung standen die experimentelle Untersuchung des Schlepperkonzepts unter Laborbedingungen sowie Tests mit den Modulen, insbesondere im Hinblick auf die Positions- und Inertialsensorik sowie die damit verbundene Kommunikationsstruktur.


Erste Erprobung 2025 im Projekt GN2+ Kooperatives Manövrieren im Hafen

In Vorbereitung auf die große Erprobung im Mai zum kooperativen Manövrieren mit drei Fahrzeugen, dem Forschungsschiff DENEB (Bundesamt für Seeschifffahrt und Hydrographie, BSH) und zwei Versuchsträgern der Universität Rostock, Bernhard Lampe und MESSIN, wurde eine erste Erprobung vom 7.-11. April durchgeführt. Die Projektpartner von der RWTH haben ihre Sensorik und Rechentechnik auf den Versuchsträgern installiert und getestet. Außerdem konnte die Kommunikation zwischen den Fahrzeugen über VPN zur Übertragung der Navigationsdaten erfolgreich erprobt werden. Die neue Regelungslösung mittels MPC wurde für das unbemannte Fahrzeug MESSIN getestet. Um sich mit den Versuchsträgern vertraut zu machen und die Sicherheitsaspekte beim kooperativen Manövrieren zu besprechen, waren Vertreter vom BSH vor Ort, u.a. der stellvertretende Kapitän der DENEB Michael Quandt.

Nachruf Prof. Dr.-Ing. habil. Jürgen Majohr
Das Institut für Automatisierungstechnik der Universität Rostock trauert um
Prof. Dr.-Ing. habil. Jürgen Majohr
1938 - 2025
Mit Jürgen Majohr verlieren wir eine prägende Persönlichkeit der maritimen Regelungstechnik.
Sein Engagement für Forschung und Lehre war beispielhaft – ohne ihn gäbe es die maritime Arbeitsgruppe am Institut in ihrer heutigen Form nicht.
Auch im Ruhestand setzte er sich durch Gremienarbeit und als Autor von Fachbüchern weiterhin für die maritime Regelungstechnik ein.
Neben seinen akademischen Leistungen werden wir ihn vor allem als geschätzten Kollegen und Menschen in Erinnerung behalten.
In tiefer Trauer und Dankbarkeit.
Obituary: in memory of
Prof. Dr.-Ing. habil. Jürgen Majohr
1938 - 2025
With Jürgen Majohr, we have lost a key figure in maritime control engineering.
His dedication to research and teaching was exemplary - the maritime research group at our institute would not exist in its current form without him.
Even in retirement, he remained committed to the field through committee work and as the author of several books.
Beyond his academic achievements, he will be remembered above all as a valued colleague and person.
In deep mourning and gratitude.
59. Regelungstechnisches Kolloquium in Boppard
Jährlich kommen Vertreter der Lehrstühle für Regelungs- und Automatisierungstechnik aus dem deutschsprachigen Raum in Boppard zum Regelungstechnischen Kolloquium zusammen. Neben Wissenschaftlern nehmen auch Experten aus der Industrie und von Verbänden teil.
Das Kolloquium dient als Plattform für den fachlichen Austausch und die Diskussion aktueller Forschungsideen. In diesem Jahr stellte Dr.-Ing. Alexander Schöley vom Lehrstuhl für Regelungstechnik seine Forschungsergebnisse zur Stabilitätsuntersuchung der Netzsynchronisation von Umrichtern in schwachen Netzen vor.


Rostocker Straßenbahn AG und Universität Rostock starten Forschungsprojekt für automatisierte Assistenzsysteme auf Personenfähren


Die Rostocker Straßenbahn AG (RSAG) hat gemeinsam mit dem Institut für Automatisierungstechnik der Universität Rostock das Forschungsprojekt WarnowstromerAI erfolgreich eingeworben.
Ziel des Projekts ist die Entwicklung eines Steuerungs- und Regelungssystems, das automatische Assistenzfunktionen auf Binnenfähren integriert. Der Fokus liegt auf einer universellen Lösung, die wirtschaftliche, technische und zulassungsrechtliche Aspekte berücksichtigt. Die erarbeiteten Technologien werden auf der Personenfähre Warnowstromer der RSAG getestet. Dazu wird das Schiff mit bildgebender Sensorik und einer Schnittstelle zur automatisierten Steuerung der Antriebe ausgestattet.
Fotos: Joachim Kloock
Foto 1 v.l.n.r.: Dr.-Ing. Björn Kolewe, Institut für Automatisierungstechnik der Uni Rostock, RSAG-Vorstand Jan Bleis, RSAG-Fährkoordinatorin Anke Krocker und der zuständige Senator Dr. Chris von Wrycz Rekowski
Projektstart "Vernetztes und automatisiertes Fahren auf der Spree-Oder-Wasserstraße (SOW)"

Mit einer Kick-off-Veranstaltung im Hafen Königs Wusterhausen fiel am 25.03.2025 der offizielle Startschuss für das Innovationsprojekt DigitalSOW2. Ziel des Projekts ist die Weiterentwicklung der Automatisierung im Wasserstraßentransport auf der Spree-Oder-Wasserstraße.
DigitalSOW2 wird von einem Konsortium aus der Alberding GmbH (Wildau), dem Fachgebiet Entwurf und Betrieb Maritimer Systeme der TU Berlin sowie dem Institut für Automatisierungstechnik der Universität Rostock durchgeführt. Das Vorhaben wird im Rahmen der dritten Förderrichtlinie zur Entwicklung Digitaler Testfelder an Bundeswasserstraßen (DTW III) gefördert.
Im Fokus stehen die Weiterentwicklung eines digitalen Assistenzsystems sowie die V2X-Kommunikation zwischen Versuchsträger und landseitiger Infrastruktur. Zudem werden Simulationen entwickelt, um den technischen und wirtschaftlichen Einsatz des Versuchsträgers „Boris Kluge“ in multimodale Transportprozesse einzuschätzen. Die Universität Rostock konzentriert sich hierbei auf kausale und verifizierbare Objekterkennung und Positionierung mittels LIDAR-Sensoren auf Binnenwasserstraßen.
Das Projekt DigitalSOW2 stellt einen wichtigen Schritt in Richtung einer digitalisierten und nachhaltigen Binnenschifffahrt dar.
Foto: Alberding GmbH
Bildunterschrift (v.l.n.r.): Emirhan Üzüm (Technische Universität Berlin), Enrico Schütz (Technische Universität Berlin), Jörg Zimmermann (Alberding GmbH), Jürgen Alberding (Alberding GmbH), Daniel Brunner (Alberding GmbH), Theo Timmermann (Alberding GmbH), Meinard Gimm (Technische Universität Berlin), Prof. Dr. Torsten Jeinsch (Universität Rostock)
Buch „Sampled-Data-Regelung für periodische Objekte“
Seit dem 4. März 2025 ist das neue Buch „Sampled-Data-Regelung für periodische Objekte“ von Efim N. Rosenwasser, Torsten Jeinsch und Wolfgang Drewelow im Springerverlag erschienen.
Dieses Buch widmet sich dem Problem der Sampled-Data-Regelung endlich-dimensionaler linearer kontinuierlicher periodischer Objekte (FDLCP). Es füllt eine Forschungslücke bei der Behandlung dieses wichtigen Themas. Die hier vorgestellten Methoden basieren auf der parametrischen Übertragungsmatrix, die sich bei der Untersuchung von Sampled-Data-Systemen mit linearen zeitinvarianten Objekten bewährt hat. Das Buch zeigt, dass dieses Konzept erfolgreich auf Sampled-Data-Systeme mit FDLCP-Objekten übertragen werden kann. Es ist in fünf Teile gegliedert:
- eine Einführung in den Frequenzansatz zur mathematischen Beschreibung von FDLCP-Objekten einschließlich der Bestimmung ihrer Struktur und ihrer Darstellung als Reihenschaltung von periodischen Modulatoren und einem linearen zeitinvarianten Objekt;
- die Konstruktion der parametrischen Übertragungsmatrix für verschiedene Arten von offenen und geschlossenen Abtastsystemen mit FDLCP-Objekten;
- die Lösung von Problemen der kausalen modalen Steuerung von FDLCP-Objekten auf der Grundlage des mathematischen Apparats der determinierten Polynomgleichungen;
- die Betrachtung des Problems der Konstruktion eines quadratischen Gütefunktionals für das H2-Optimierungsproblem eines einschleifigen synchronen Sampled-Data-Systems mit Totzeit in der Stellgröße;
- Beschreibung des allgemeinen H2-Optimierungsverfahrens.
Das notwendige mathematische Referenzmaterial ist an den relevanten Stellen des Buches enthalten.
Sampled-Data-Regelung für periodische Objekte richtet sich an Wissenschaftler und Ingenieure, die sich mit der Erforschung und dem Entwurf von Systemen mit FDLCP-Objekten befassen, an Doktoranden, die ihre Kompetenzen erweitern wollen, an ihre Dozenten und an Mathematiker, die auf dem Gebiet der Regelungstheorie arbeiten.
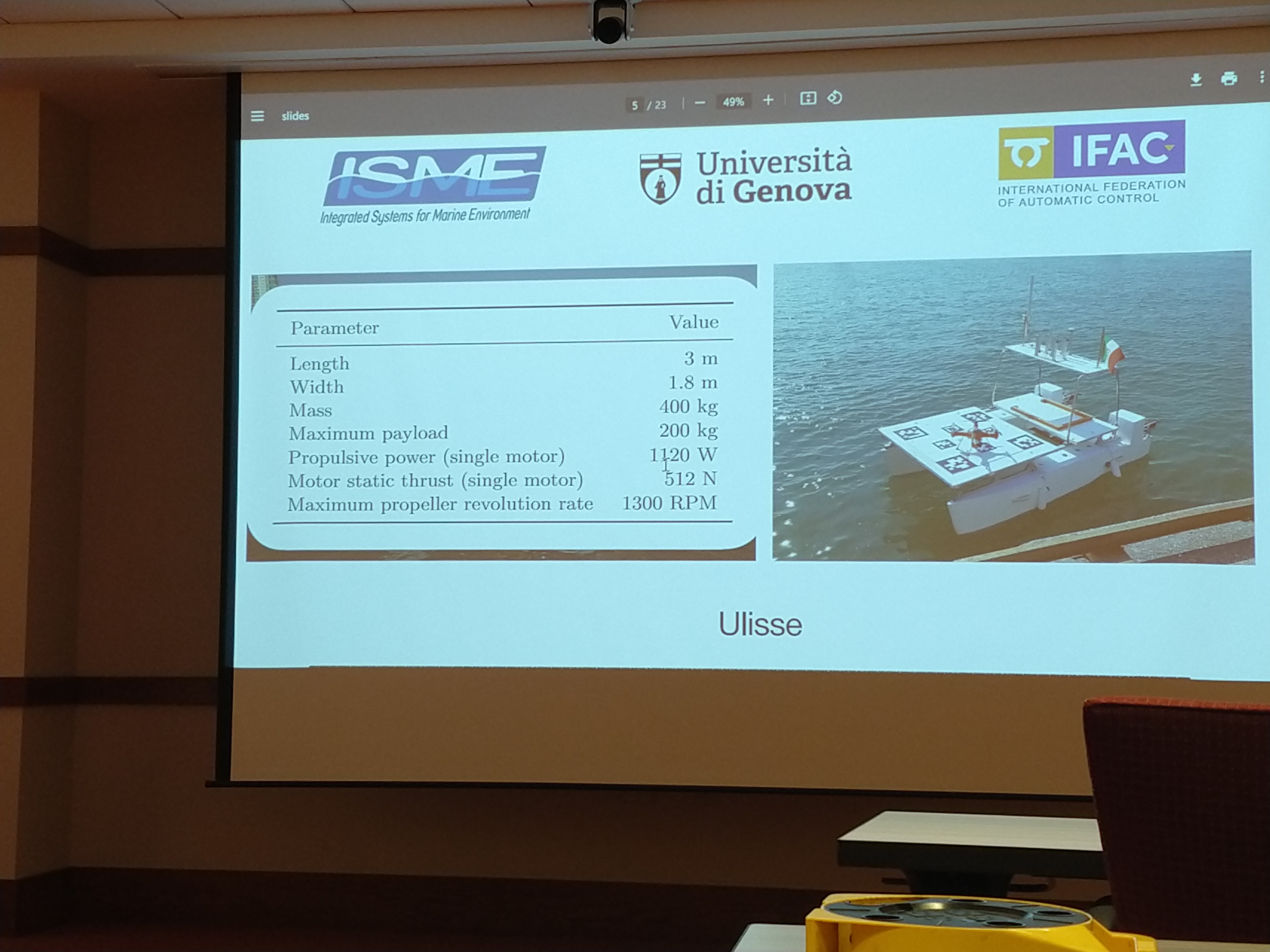
Marine Robotics @GRAAL - Genoa Robotics and Automation Lab, University of Genova

Date: Wednesday, January 15, 2025
Time: 09:00 am - 10:00 am
Location: Institute for Automation, Warnemünde, Room 8014
Abstract:
The talk will provide an overview of the Marine Robotics competences, experiences and research activities of the Genoa Robotics and Automation Lab (GRAAL) hosted at the University of Genova. Topics include: underwater manipulation and intervention as well as surface marine robot modeling and identification, navigation, guidance, and control of surface and underwater vehicles for single robot and cooperative robot application at sea.
Finally, the talk will provide a brief description of the other related competences at the University of Genova as well of the national Interuniversity research center on Integrated Systems for the Marine Environment (ISME) working on Marine Robotics in Italy since 1999.
Speaker Giovanni Indiveri
Associate Professor in Systems and Control Engineering, University of Genova,
Department of Informatics, Bioengineering, Robotics, and Systems
Engineering - DIBRIS, Via all'Opera Pia, 13 16145 Genova, Italy.
Director of ISME, the national research Interuniversity Center on Integrated Systems for the Marine Environment.




International Ship Control Systems Symposium - INEC Konferenz in Liverpool/ UK
Der Lehrstuhl Regelungstechnik hat, vertreten durch Agnes Schubert, am International Ship Control Systems Symposium (iSCSS) im Rahmen der INEC Konferenz in Liverpool/ UK teilgenommen. Vom 5. Bis 7. November trafen sich Wissenschaftler und nautische Offiziere aus aller Welt, um die neusten Ergebnisse und Konzeptionen für eine moderne und effiziente Schifffahrt zu präsentieren. Neben dem gewohnten Vortragsformat gab es zum ersten Mal auch interaktive Sessions, bei denen nach einem kurzen Impuls direkt in die Diskussion eingestiegen wurde. Das neue Format ermöglichte es, konkreter auf Fragen einzugehen und sich über zukunftsweisende Projektideen auszutauschen. Der Beitrag unseres Institutes trug den Titel: „Automatic Maneuvering of Vessels with Power-Optimized Thrust Allocation“ und wurde in beiden Formaten präsentiert.



Vortrag auf der OCEANS 2024 Konferenz in Halifax, Nova Scotia, Kanada
In Kanadas „Ocean City“ Halifax brachte die OCEANS 2024 Konferenz vom 23. bis 26. September Fachleute aller Welt aus der maritimen Wissenschaft und Industrie zusammen. Ihnen bot sich die Gelegenheit zum Austausch über ihre neuesten Forschungsergebnisse und Innovationen zum Schutz und zur Nutzung der Ozeane.
Der Lehrstuhl Regelungstechnik präsentierte in seinem Beitrag „Combined Actuator Allocation for Underwater Vehicles with Variable Buoyancy Systems using QP-based Optimization“ seine aktuellen Forschungsergebnisse zu Technologien für die Steuerung und Regelung unbemannter Unterwasserfahrzeuge. Diese entstanden im Rahmen des Forschungsvorhabens MUM2 – Modular Underwater Mothership (www.mum-project.de), einem vom Bundesministerium für Wirtschaft und Klimaschutz (BMWK) geförderten Projekt.


6th Autonomous Inland and Short Sea Shipping Conference (AISS)
Die 6. Autonomous Inland and Short Sea Shipping Conference fand in diesem Jahr am 10. und 11. September bei der Niederrheinischen Industrie- und Handelskammer in Duisburg statt. Die Autonomous Inland and Short Sea Shipping Conference wurde 2019 als jährliche Konferenz ins Leben gerufen, um den technischen und wissenschaftlichen Austausch zwischen Industrie, Wissenschaft und Behörden in den Bereichen autonome Binnen- und Küstenschifffahrt sowie Hafenlogistik und intelligente Wasserlogistik zu fördern.
Der Lehrstuhl für Regelungstechnik war dort durch M.Khalis Mohd Fadil und Jinhan Kong vertreten. Beide präsentierten Ergebnisse ihrer aktuellen Forschung:
- M. Khalis Mohd Fadil, Ian Karez, Torsten Jeinsch:: „Constructing Waterways Map using a LiDAR-inertial odometry with Incremental Smoothing for Surface Vessel: Considering Waterways related Disturbance“
- Jinhan Kong, Ian Karez, Dongze Wang, Torsten Jeinsch: „Enhanced Inland Vessel Detection Using CNN-Based Deep Learning and Lidar Technology“

Vortrag bei der 15th IFAC CAMS 2024 in Blacksburg, Virginia, USA
Vom 3.-5. September 2024 fand die 15th IFAC-Conference on Control Applications in Marine Systems, Robotics and Vehicles in Backsburg an der Virginia Tech statt.
Der Lehrstuhl Regelungstechnik präsentierte im Rahmen der Regular Session: Adaptive Robusts den Beitrag: Adaptive Observer-Based Funnel Heading Control of Surface Vessels with Rudder Actuator Nonlinearity. Schwerpunkte des Vortrages waren neuste Forschungsergebnisse aus dem Forschungsvorhaben ModularShipAssist - Autonom und kooperativ agierende Module zur kommandierten Schiffsassistenz in Häfen, einem vom Bundesministerium für Digitales und Verkehr (BMDV) im Rahmen der Förderrichtlinie „Innovative Hafentechnologien II (IHATEC II) geförderten Projekts.
Figure 1 Beitrag Adaptive Observer-based Funnel Heading Control of Surface Vessels with Rudder Actuator Nonlinearity
Figure 2 Eröffnung der 15th CAMS 2024 durch den NOC Chair Craig Woolsey vom Virginia Tech.


MMAR2024
28. International Conference on Methods and Models in Automation and Robotics (MMAR 2024) Die 28. Ausgabe der International Conference on Methods and Models in Automation and Robotics (MMAR 2024) fand dieses Jahr vom 27. bis 30.
August statt. Organisator der seit bereits 30 Jahren bestehenden Konferenz ist die West Pomeranian University of Technology in Stettin, der Austragungsort ist aber Misdroy. Vom Lehrstuhl Regelungstechnik nahm Alexander Schöley an der MMAR 2024 teil und präsentiere Forschungsergebnisse im Beitrag “A Criterion for the Transient Stability of the PLL-Based Grid Synchronization”.

DENEB-Erprobung Juli 2024
Erneut durften wir im Projekt GN2plus an Bord des BSH-Schiffs DENEB für drei Tage Ende Juli 2024 automatische Funktionalitäten testen. Highlights waren dieses Mal eine modellprädiktive Trajektorien-Regelung, die automatische Pfad- und Bewegungsplanung sowie deren Umsetzung zum Anlegen an einer virtuellen Pier und die Unterstützung der Aachner Kollegen von der RWTH beim Kalibrieren ihrer LIDAR-Sensorik. Gäste durften auch mal selbst die Joystick-Steuerung testen. Es war uns eine besondere Ehre, Kapitän Quandt und der Crew die Denny-Medal zu zeigen, die wir für ein Paper zu experimentellen Ergebnissen auf ihrem Schiff gewonnen haben. An den Fortschritten zur Entwicklung automatischer Funktionen in der Schifffahrt haben sie einen unverzichtbaren Anteil.



22. European Control Conference – ECC2024
In Stockholm an der Königlich Technischen Hochschule (KTH) fand vom 25.- 28. Juli die 22. European Control Conference – ECC2024 statt. Mit 1100 Teilnehmern aus aller Welt war es die bisher größte ECC. Viele der Vorträge befassten sich mit Fragen zur Regelungstheorie, aber es wurde auch der Schulterschluss zur praktischen Anwendung der Regelungstechnik in der Industrie durch spezifische Plenarvorträge und Sessions gesucht. Aus dem Institut für Automatisierungstechnik kam ein Beitrag von Agnes Schubert zum Einfluss des Windes auf den Energieverbrauch von Schiffen. Neben der Konferenz wurden Informationen zum assistierten und automatischen Fahren in der Schifffahrt in Schweden gesammelt.


Vortrag und Workshop zum Thema Modellbildung und Simulation technischer Systeme mit MapleSim
Am Montag den 24. Juni 2024 war Dr.-Ing. René Noack, Senior Application Engineer von Maplesoft™ zu Gast am Institut für Automatisierungstechnik. Maplesoft™ mit Sitz in Waterloo, ON Canada ist eine Tochtergesellschaft der Cybernet Systems Co., Ltd. in Japan und einer der führenden Lieferanten von Hochleistungs-Softwarewerkzeugen für Technik, Wissenschaft und Mathematik.
Dr. Noack gab den anwesenden Studierenden und Mitarbeitern am IAT einen Einblick in die neusten Möglichkeiten von MapleSim, einer Software zur Simulation von Mehrkörpersystemen, zur Unterstützung der Anwender in der frühen Konstruktionsphase, bis zur Optimierung der Anlagenperformance. Hierbei ermöglicht MapleSim eine ganzheitliche Betrachtung von unterschiedlichen Disziplinen, wie beispielsweise Hydraulik, Mechanik und Elektronik.
Im Rahmen des anschließenden Workshops wurden befristete Studentenlizenzen zur Verfügung gestellt, so dass sich jeder Teilnehmer individuell mit MapleSim auseinandersetzen konnte
A-SWARM II – Autonome elektrische Schifffahrt auf Wasserstraßen in Metropolregionen I

Am 28. Juni 2024 fand bei der Berliner Hafen- und Lagerhausgesellschaft mbH (BEHALA) im Berliner Westhafen das Kick-off Meeting im Forschungsvorhaben A-SWARM II – Autonome elektrische Schifffahrt auf Wasserstraßen in Metropolregionen II (Förderkennzeichen 03SX593A) statt.
Das vom Bundesministerium für Wirtschaft und Klimaschutz geförderte Projekt knüpft als Folgethema an das Forschungsvorhaben A-SWARM (Förderkennzeichen 03SX485A) an und beschäftigt sich mit dem nächsten Schritt hin zu einem neuartigen integrierten Transportsystem auf Binnenwasserstraßen.
Konsortialführer des hochinnovativen Teams ist die Schiffbau-Versuchsanstalt Potsdam GmbH. Zum Team gehören die Berliner Hafen- und Lagerhausgesellschaft mbH (BEHALA), die DHL Group, das Fachgebiet Entwurf und Betrieb Maritimer Systeme der Technischen Universität Berlin, das Institut für Automatisierungstechnik der Universität Rostock und die Veinland GmbH.
Das Bundeswirtschaftsministerium für Wirtschaft und Klimaschutz steilt im Rahmen der Maritimen Forschungsstrategie 2025 die Förderung bereit, die Betreuung erfolgt durch den Projektträger Jülich (PTJ).
Symposium E2MUT
Im Rahmen des RUBIN-Projektes E2MUT - Emissionsfreie Elektromobilität für maritime Transporte fand vom 11. bis 12. Juni 2024 das Symposium „E-Mobilität auf dem Wasser – Symposium zu emissionsfreien maritimen Transportkonzepten“ statt. Neben Vertretern der Projektpartnern gab es zahlreiche Gäste aus Politik und Wirtschaft, von Reedereien und ähnlichen gelagerten Projekten. Ergebnisse wurden vorgestellt und Perspektiven für eine saubere und effizientere Schifffahrt aufgezeigt. Der Vortrag von Agnes Schubert aus dem IAT befasste sich damit, wie Assistenz- und Automationsfunktionen dazu beitragen können, den Schiffsbetrieb energetisch effizienter zu gestalten.


ModularShipAssist - Autonom und kooperativ agierende Module zur kommandierten Schiffsassistenz in Häfen
In der KW 23 fand im Rahmen des Forschungsvorhabens ModularShipAssist eine gemeinsame Erprobung mit den Projektpartnern J.M. Voith SE & Co. KG | VTA sowie dem Institut für Fluiddynamik und Schiffstheorie der Technische Universität Hamburg in der Hamburgische Schiffbau-Versuchsanstalt GmbH (HSVA) in Hamburg-Barmbek-Nord statt.
Das Forschungsvorhaben ModularShipAssist, gefördert in der Förderrichtlinie Innovative Hafentechnologien II des
Bundesministerium für Verkehr und digitale Infrastruktur, zielt auf die Entwicklung eines autonomen, modularen Assistenzsystems, bestehend aus einer variablen Anzahl von elektrisch angetriebenen Schub- und Schleppermodulen und einer mobilen Kommandozentrale.
Schwerpunkte während der Erprobung waren der Einbau aller Komponenten in und die Inbetriebnahme des Versuchsträgers. Hierzu wurden Kommunikationstests, die Kalibrierung und Transformation des Kameramesssystems zur Positionsmessung sowie zahlreiche Test- und Referenzfahrten mit dem Modell des VWT-Schleppers durchgeführt.
Figure 1 VWT im Wasser



Vortrag bei IFAC Safeprocess 2024 in Ferrara, Italien
Vom 4.-7. Juni 2024 fand das 12th IFAC-Symposium on Fault Detection, Supervision and Safety for Technical Processes in Ferrara, einer Stadt in der italienischen Region Emilia-Romagna in Norditalien statt.
Der Lehrstuhl Regelungstechnik wurde erfolgreich durch Assoc. Prof. Ph.D. Reza Shanazi vertreten. Er präsentierte im Rahmen der Invited Session: Fault Diagnosis and Fault Tolerant Control for Safety of Marine Systems den Beitrag ESO-Based Fault-Tolerant Funnel Heading Control of Surface Vessels.


Besuch von der Universidad del Cauca
Am Dienstag den 04.06.2024 war eine 12-köpfige Delegation vom Department of Electronics, Instrumentation, and Control der Faculty of Electronic and Telecommunications Engineering der University of Cauca, Kolumbien im Anwendungszentrum Regelungstechnik zu Gast. 11 Studierende und Professor Andrés Fernándo Ordoñez Hurtado informierten sich über die Forschungsaktivitäten des Lehrstuhls Regelungstechnik. Die Begrüßung der Gäste übernahm Dr. Rudy Cepeda Gomez in der Landessprache. Nach einer Vorstellung des Instituts für Automatisierungstechnik wurden vier ausgewählte Forschungsvorhaben präsentiert. Die aufgekommenen Fragen konnten in Diskussionen während des Rundgangs und der Vorführung im Anwendungszentrum Regelungstechnik mit den Mitarbeitern und Studierenden beantwortet werden.






ModularShipAssist - Autonom und kooperativ agierende Module zur kommandierten Schiffsassistenz in Häfen
Im Forschungsvorhabens ModularShipAssist erfolgt die Entwicklung eines autonomen, modularen Assistenzsystems, bestehend aus einer variablen Anzahl von elektrisch angetriebenen Schleppermodulen. Die ersten entwickelten Modelle der Assistenzmodule wurden durch das Unternehmen Möbius Modell- und Formenbau angefertigt und am Montag den 27. Mai im Institut für Automatisierungstechnik angeliefert. In den nächsten Wochen werden das Antriebssystem einschließlich des Steuerungs- und Regelungssystems integriert. Die Fähigkeiten des entwickelten Assistenzsystems sollen anschließend im Modellmaßstab unter Realbedingungen in einem Hafen demonstriert.
Weitere Informationen zum Forschungsvorhaben ModularShipAssist:



Besuch des Abschlussjahrgangs 85 im Anwendungszentrum Regelungstechnik

Am Sonnabend den 18. Mai 2025 besuche eine Seminargruppe des Abschlussjahrgangs 85 der damaligen Sektion Technische Elektronik der Universität Rostock das Anwendungszentrum Regelungstechnik (AZR) im Tannenweg.
Prof. Dr. sc. techn. Karl Hormann war zu dieser Zeit der Sektionsdirektor (1974-1986) und hatte den Lehrstuhl für Regelungstechnik inne. In der Lehre und Forschung der Regelungstechnik wurde er von dem damaligen Oberassistenten Dr. Lutz Mohr und den Assistenten Dr. Ralf Friedrich, Dr. Adolf Gienapp und Dr. Bernhard Lampe unterstützt.
Sven Lack, wissenschaftlicher Mitarbeiter am Lehrstuhl Regelungstechnik, begrüßte die Absolventen im AZR. Mit einem Vortrag gab er einen Überblick zur Fakultät für Informatik und Elektrotechnik und dem Institut für Automatisierungstechnik. Eine Führung und eine Präsentation von aktuellen Forschungsvorhaben rundeten den Besuch ab.
Vorträge OCEANS 2024 SINGAPORE 14. bis 18. April 2024

Title: Generalized Approach for Modeling and Control of Structurally Variable Underwater Vehicles (#568)
Session name: Autonomous Underwater Vehicles
Date / Time: 18.04.2024 - 10:50 - 12:30
Location: Marina Bay Sands Level 4, Roselle 4611
Presenting Author: Martin Kurowski

Title: Predictive Disturbance Rejection Method to Control Vessels in Presence of Currents and Wind (#578)
Session name: Vehicle Navigation
Date / Time: 17.04.2024 - 10:50 - 12:30
Location: Marina Bay Sands Level 4, Roselle 4612
Presenting Author: Johannes Marx
Title: Control of a small Underwater Vehicle Manipulator System - a highly automated Pick and Place Experiment (#685)
Session name: Remotely Operated Vehicles
Date / Time: 16.04.2024 - 15:30 - 17:30
Location: Marina Bay Sands Level 4, Roselle 4612
Presenting Author: Sven Lack
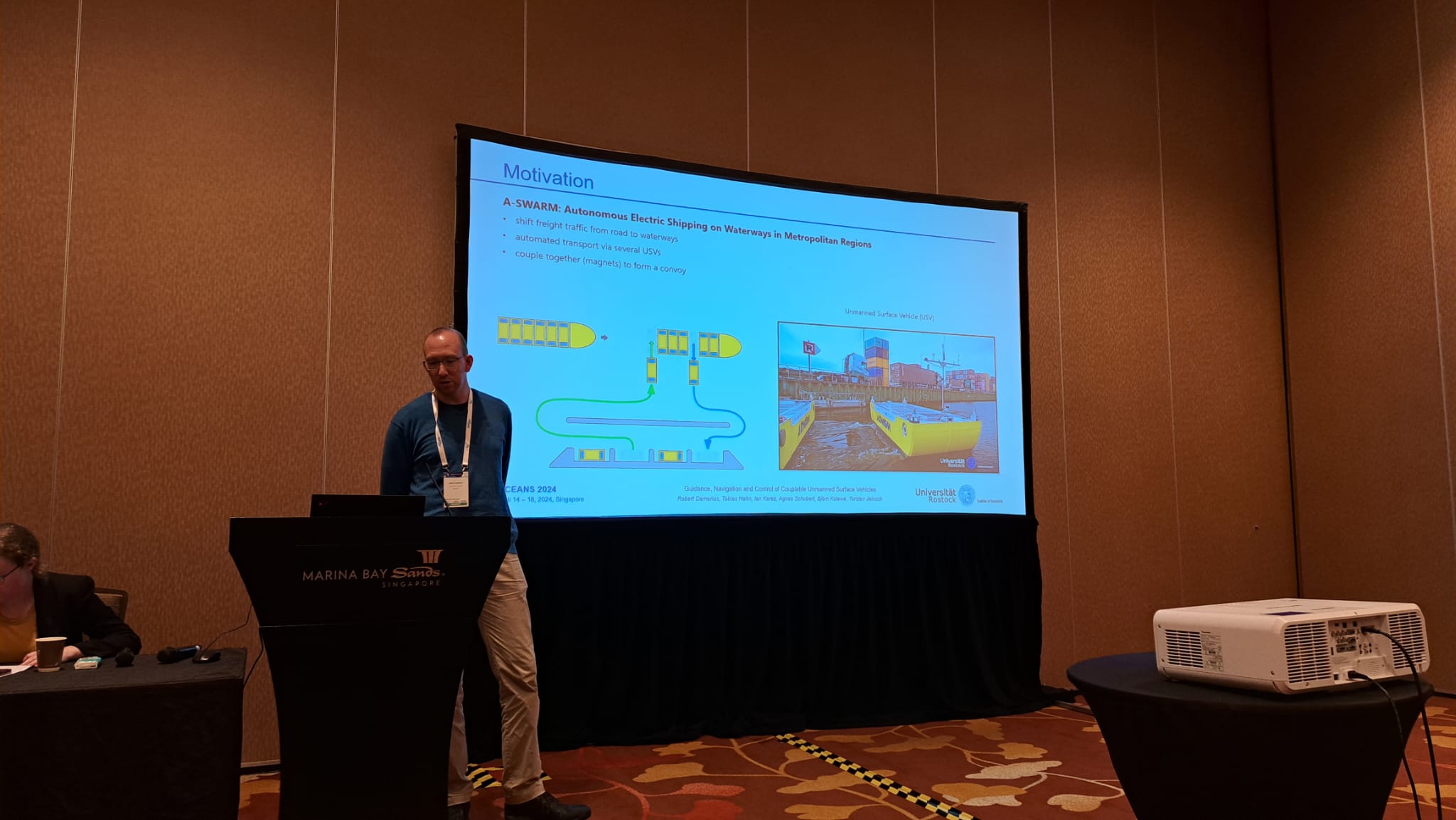
Title: Guidance, Navigation and Control of Couplable Unmanned Surface Vehicles (#314)
Session name: SST-6: Navigation and Situational Awareness for Autonomous Ships; SST-03: Ballast Water Management and Hull Cleaning Regulations
Date / Time: 17.04.2024 - 15:50 - 17:30
Location: Marina Bay Sands Level 4, Simpor 4812
Presenting Author: Robert Damerius

Title: Comparison of Performance in Assisted and Automatic Berthing Maneuvers with the Research Vessel DENEB (#313)
Session name: Vehicle Performance
Date / Time: 18.04.2024 - 15:50 - 17:30
Location: Marina Bay Sands Level 4, Roselle 4611
Presenting Author: Agnes Schubert

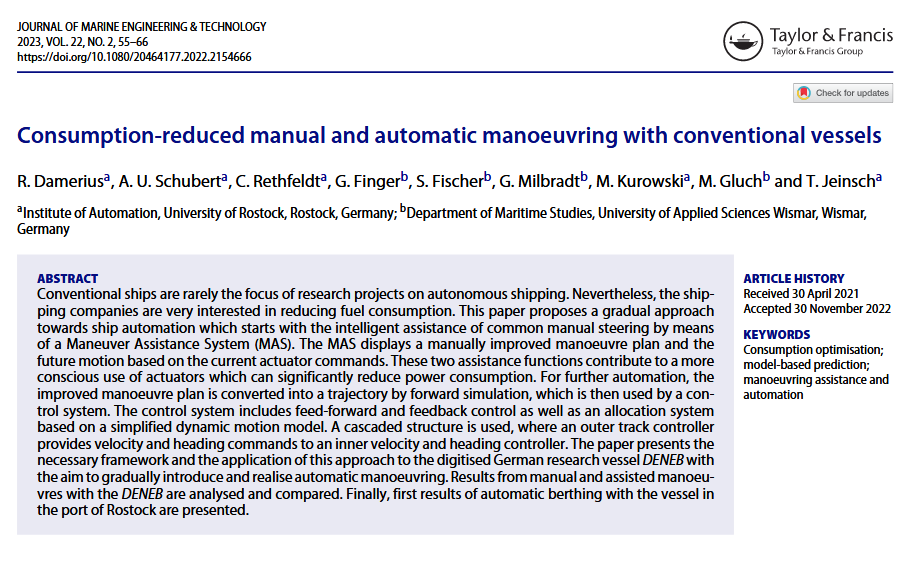
Wissenschaftlerteam der Universität Rostock und der Hochschule Wismar gewinnt Denny Medal 2024

Die Denny-Medal für die Veröffentlichung des besten Beitrags im Journal of Marine Engineering & Technology (Taylor & Francis Group) geht dieses Jahr nach Rostock Warnemünde. Die Autoren des Beitrags „Consumption-reduced manual and automatic mano-euvring with conventional vessels“ (Verbrauchsreduziertes manuelles und automatisches Manövrieren mit konventionellen Schiffen) vom Institut für Automatisierungstechnik der Universität Rostock und dem Bereich Seefahrt der Hochschule Wismar veröffentlichten Ergebnisse aus dem gemeinsamen Forschungsvorhaben GALILEOnautic und GALILEOnautic 2.
Dieser Award wird jährlich für das beste Paper ausgelobt, das in jedem der technischen Journale von IMarEST (Institute of Marine Engineering, Science & Technology, England & Wales) veröffentlicht wurde. Der Artikel erhielt die Auszeichnung sowohl aufgrund seiner inhaltlichen Originalität als Darstellung jüngster und zukunftsweisender Entwicklungen in der maritimen Branche als auch seiner technisch präzisen Qualität.
Der Beitrag untersucht, wie der Kraftstoffverbrauch beim Manövrieren von Schiffen reduziert werden kann. Dabei stehen konventionelle Schiffe im Fokus, die mit herkömmlicher Antriebstechnik ausgestattet sind und heute den Hauptanteil der weltweiten Flotte ausmachen. Die Entwicklungen setzen auf eine Unterstützung der Offiziere bei der Schiffsführung. Durch Assistenzsysteme wird die bestmögliche Strategie gefunden, ein Manöver von A nach B unter den aktuellen Wetterbedingungen effizient und sicher durchzuführen. Dabei werden die Messwerte aller Schiffsprozesse einbezogen, die auch auf der Brücke angezeigt werden. Wie bei einem Navigationssystem für Autos kann der Schiffsführer dem fertigen Plan bei einer manuellen Steuerung folgen oder das Manöver wird automatisch ausgeführt, indem der Kapitän auf das Automationssystem umschaltet, das dann das Schiff führt. Im Assistenzsystem kann der wachhabende Offizier verfolgen, ob der Plan eingehalten wird. Der Ansatz trägt einerseits dem wachsenden Fachkräftemangel in der maritimen Brache Rechnung und andererseits der Forderung nach Senkung von Energieverbrauch und Emissionen gerade beim Manövrieren in Küstennähe und im Hafen.
Für die gewürdigte Publikation zeichnen zum einen die Regelungstechniker der Universität Rostock verantwortlich, die das Automationssystem entwickelt haben, aber zum anderen auch die Ingenieure aus dem In-Institut ISSIMS (Institut für Innovative Schiffs-Simulation und Maritime Systeme) der Hochschule Wismar, die mit ihrem nautischen Expertenwissen das Assistenzsystem entworfen und aufgebaut haben. Ohne die enge Zusammenarbeit zwischen den beiden Institutionen wäre diese innovative Lösung für eine sauberere und zukunftsweisende Schifffahrt nicht realisierbar gewesen. Das Wissenschaftlerteam hatte und hat zudem die Gelegenheit, die Entwicklungen unter realen Bedingungen zu testen und zu optimieren. Dankenswerterweise ermöglichen ihnen das Bundesamt für Seeschifffahrt und Hydrographie (BSH) und die Crew des 52 Meter langen Vermessungs-, Wracksuch- und Forschungsschiffs DENEB die praktischen Arbeiten, wofür die Wissenschaftler sowohl dem BSH als auch der Crew sehr dankbar sind.
Die Überreichung des Preises erfolgt während eines Gala-Dinners am 25. April 2024 in London. Hauptredner wird der Schauspieler Mark Williams sein.
Kontakt:
Dr.-Ing. Agnes Schubert
Universität Rostock
Institut für Automatisierungstechnik
Tel.: +49 381 498-7728
agnes.schubert@uni-rostock.de


Besuch des MSCW in Warnemünde mit Studenten der Lehrveranstaltung Maritime Systeme
Am 24.01.2024 hatten die Studenten im Rahmen der Lehrveranstaltung Maritime Systeme wieder die Chance sich als "Kapitän" auf großer Fahrt zu beweisen.
Dazu waren wir im Schiffsführungssimulator des MSCW in Warnemünde, wo jeder das Steuer eines 200m Frachters übernehmen konnte. Nebenbei wurden natürlich die in der Schifffahrt eingesetzten Kurs- und Bahnregelungen für Schiffe begutachtet und auch bei Seegang erprobt.
Wir danken nochmals dem Team des MSCW allen voran Cathleen und Holger Korte für ihre seemännischen Erläuterungen und die tolle Führung durch den Simulator.



Tag der offenen Tür im Anwendungszentrum Regelungstechnik
Auch in diesem Jahr lud der Lehrstuhl Regelungstechnik zu seinem traditionell jährlich stattfindenden Tag der offenen Tür in das Anwendungszentrum ein.
Am Montag den 18.12.2023 folgten der Einladung einige Partner und Studenten aller Semester der Bachelor- und Masterstudiengänge der Informatik und Elektrotechnik.
Es konnten die autonomen und ferngesteuerten Über- und Unterwasserfahrzeuge, Bodeneffektfahrzeuge, Rover und Dronen besichtigt und ausprobiert werden. Der Laserscanner konnte beim Vermessen erlebt werden und die Geschicklichkeit auf dem Fahrrad mit Hinterradlenkung wurde auf die Probe gestellt. Es konnten fachliche Fragen gestellt werden und Einblicke in die Arbeit des Lehrstuhls Regelungstechnick gewonnen werden.
Wir freuen uns schon auf den Tag der offenen Tür 2024.



Oceans 2023 Gulf Coast Biloxi Mississippi


Vom 25ten bis 28ten September fand dieses Jahr die Oceans in Biloxi im Bundesstaat Mississippi in den Vereinigten Staaten von Amerika Staat. Die Oceans Konferenz richtet sich an Fachleute aus aller Welt, welche sich über den Schutz und die Nutzung der größten natürlichen Ressource der Welt - unserer Ozeane – austauschen und dabei eine Führungsrolle übernehmen wollen.
Passend dazu wurde unser Lehrstuhl von einem Mitarbeiter mit Verbindungen zum Ocean Technology Campus Rostock vertreten, Herrn Jonas Pabst.
Jonas Pabst stellte einen Beitrag mit dem Titel ”A contribution to the navigation of an underwater glider with passively adapting flapping wings using sensor fusion and a motion model” vor und konnte sich in der Plenumdiskussion der UG2-Unterwassergleitergruppe über aktuelle Trends informieren.
Der interdisziplinäre Ansatz der Oceans hat auch dazu beigetragen, dass man sich außerhalb des eigenen Forschungsschwerpunkts Anregungen zu Anwendungsfällen sowie Chancen und Risiken der unbemannten Unterwasserfahrzeuge austauschen konnte. In der Ausstellungshalle stellten Hersteller und Nutzer ihre Systeme vor und standen bei Bedarf Rede und Antwort zu diesen.
Neben den fachlichen Highlights stellte wohl auch der Besuch durch den NASA-Astronauten Fred Haise während des Gala-Dinners einen erinnerungswürdigen Moment dar.
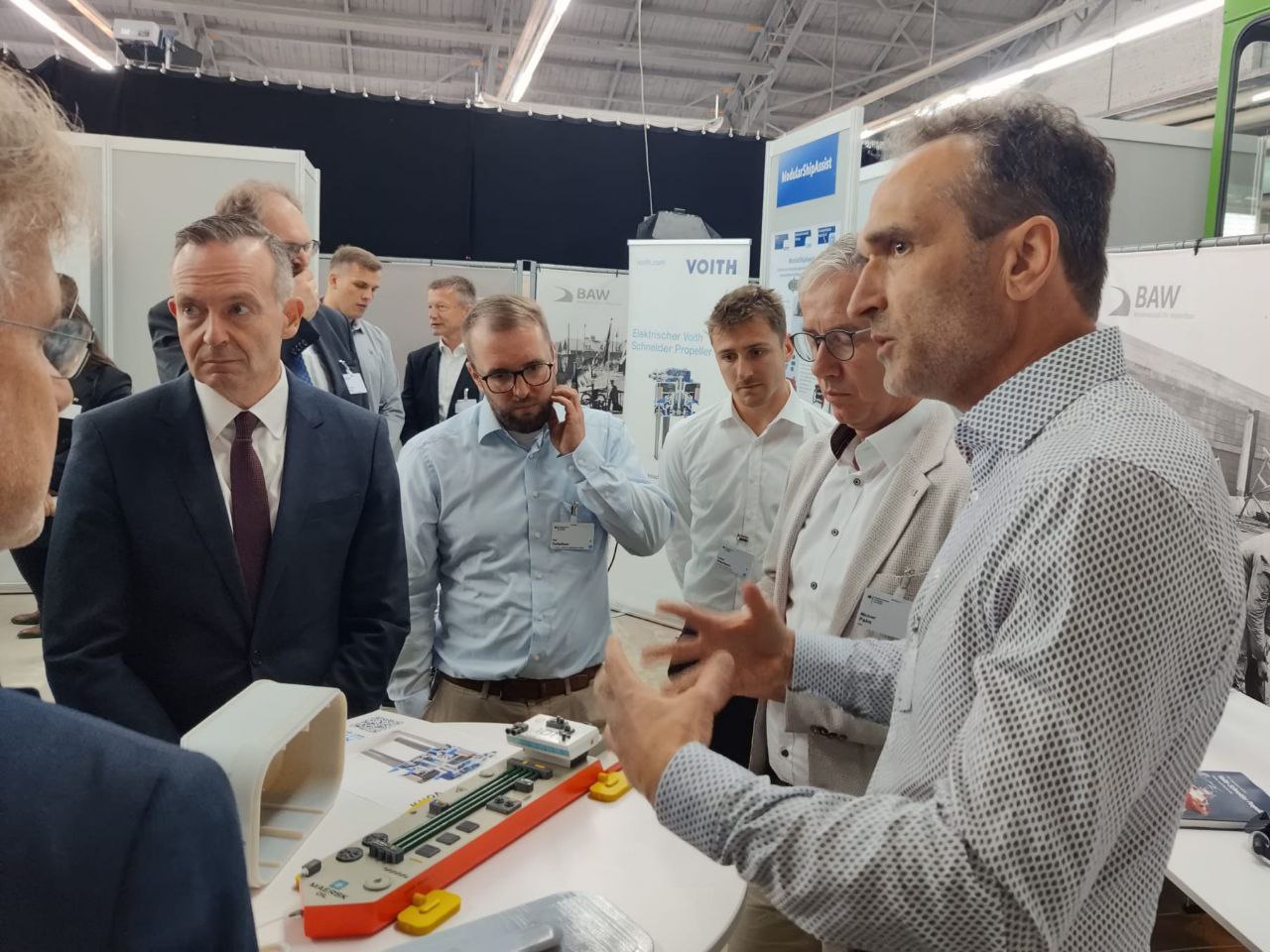
Bundesminister Volker Wissing informiert sich über Forschungsvorhaben zur kooperativen Regelung von Multifahrzeugsystemen

Auf der Fachkonferenz „Neue Technologien und Testfelder für Wasserstraßen und Häfen”, die Anfang Oktober in Karlsruhe stattfand, präsentierten Dr.-Ing. Björn Kolewe vom Lehrstuhl Regelungstechnik der Universität Rostock und Leon Tietz von der Berliner Hafen- und Lagerhausgesellschaft mbH (BEHALA) aktuelle Forschungsergebnisse zu maritimen Technologien in Häfen und auf Wasserstraßen.
Die Forscher stellten in einem gemeinsamen Vortrag die Vision „Vom Seehafen bis zur Haustür – autonomer Gütertransport auf dem Wasserweg“ mit aktuellen Ergebnissen aus den Forschungsvorhaben ModularShipAssist, DigitalSOW, SensorSOW und DigiLoeWe vor. Am zweiten Konferenztag besuchte der Bundesminister für Digitales und Verkehr, Dr. Volker Wissing, den Ausstellungsstand des Verbundprojekts ModularShipAssist. Vertreter des Projektkonsortiums, dem das Unternehmen Voith, die Technische Universität Hamburg und die Universität Rostock angehören, demonstrierten erste Forschungsergebnisse zur kooperativen Regelung von Multifahrzeugsystemen.
Ziel der Konferenz war es, Ergebnisse aus den durch das Bundesministerium für Digitales und Verkehr unterstützten Förderprogrammen „Innovative Hafentechnologien (IHATEC)“, „Digitale Testfelder Häfen (DigiTest)“ und „Digitale Testfelder Wasserstraßen (DTW)“ vorzustellen und zu diskutieren, um die Zukunft der Wasserstraßen und Häfen gemeinsam zu gestalten.


Promotionsverteidigung Dr.-Ing. Alexander Schöley

Am 09. Oktober 2023 verteidigte Herr Dr.-Ing. Alexander Schöley erfolgreich seine Dissertationsschrift zum Thema „Beitrag zur Stabilitätsuntersuchung für Umrichter am schwachen Netz“.
Mitglieder der Promotionskommission waren: Prof. Dr. V. Kühn - Universität Rostock, Prof. Dr. Torsten Jeinsch - Universität Rostock, Prof. Dr. Michael Bierhoff - Hochschule Stralsund, Prof. Dr. H.-G. Eckel - Universität Rostock, Prof. Dr. Reichenbach - Universität Rostock, Prof. Dr. Hohlfeld - Universität Rostock, Prof. Dr. Schmidt - Universität Rostock.
Herzlichen Glückwunsch!
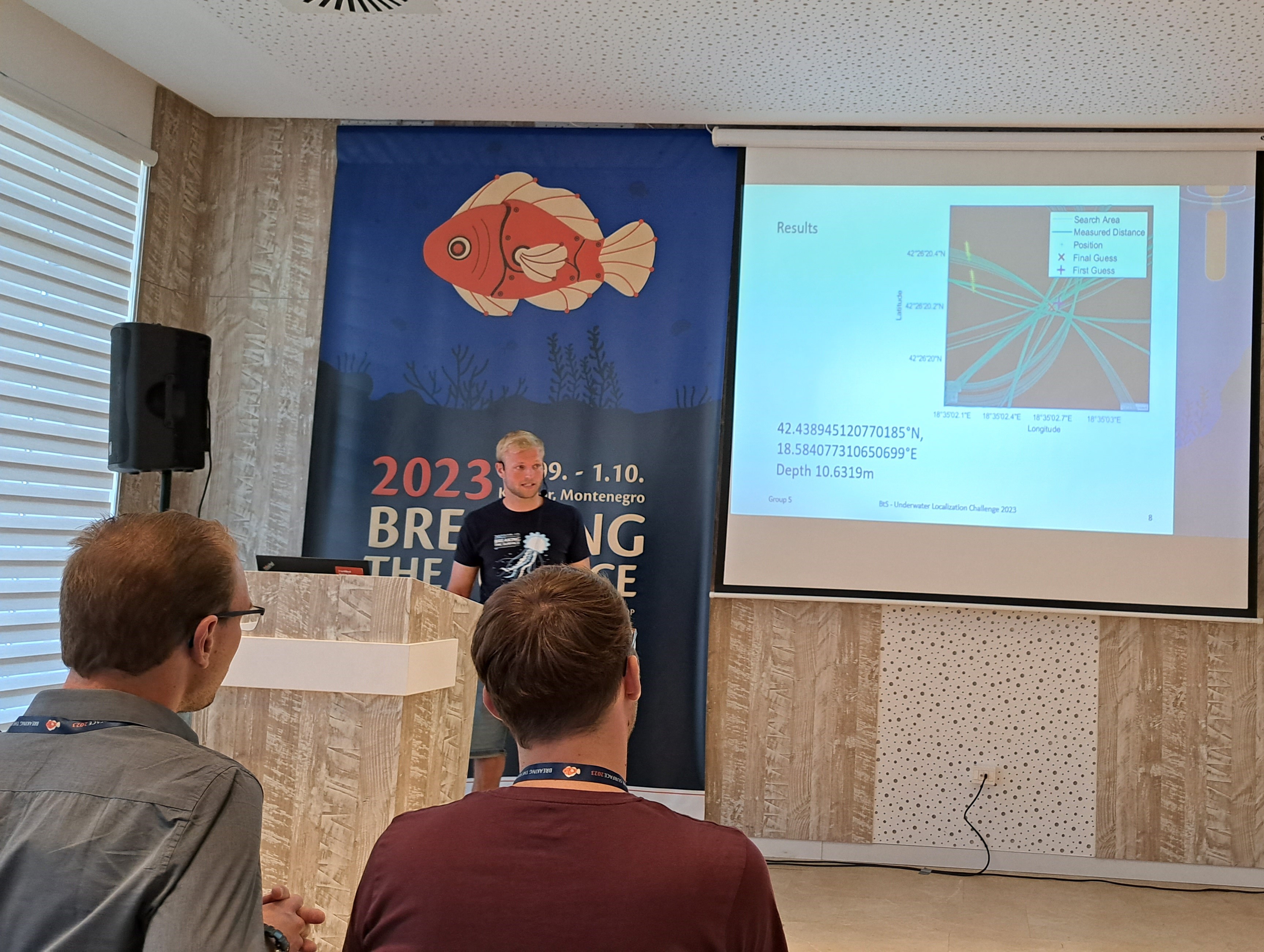
Underwater Localization Challenge BTS2023
Huch! ... Sie haben es schon wieder geschafft. Ein Team des Lehrstuhls für Regelungstechnik gewinnt zum 2. Mal die International Underwater Localization Challenge.
Ein internationales Team aus Australien und Rostock mit Dr. Sarah Jane Pell, zeitgenössische Künstlerin, Berufstaucherin, Forscherin und Entdeckerin neuer Welten, und den Doktoranden M.Eng. Sven Lack, M.Sc. Johannes Marx, M.Sc. Ian Karez vom Lehrstuhl für Regelungstechnik der Universität Rostock gewann die International Underwater Localization Challenge während des 15th International Interdisciplinary Field Workshop of Maritime Robotics and Applications - Breaking the Surface 2023 in Kumbor, Montenegro.
Herzlichen Glückwunsch!





Besuch bei MARIN in Holland
Mitte September 2023 fand eine der drei Pilot-Demonstrationen des EU-Projekts MOSES in Wageningen (NL) mit Vertretern des internationalen Konsortiums statt. Vom Lehrstuhl Regelungstechnik waren Agnes Schubert und Robert Damerius dabei, die einer Einladung von Bas de Kruif von MARIN (Maritime Research Institute Netherlands) folgten. Diese Pilot-Demo stand unter der Überschrift ‚Autonomous Sailing of an Innovative Container Feeder Vessel, making a Roundtrip Between Two Ports’. Es wurden autonome Operationen mit dem 1:17 Modell des Container-Schiffs (Modell-Länge 4,5 m) im größten Becken von MARIN (40 m x 170 m) gezeigt, wobei als Störung Seegang generiert wurde. Die Rundfahrt auf einer mit kleinen Bojen gekennzeichneten Wegpunkt-Strecke begann mit dem automatischen Ablegen im Modus Dynamisches Positionieren. Anschließend wurde für die Transitfahrt eine Geschwindigkeit von 9 kn aufgebaut, wobei der Schlitten, auf dem das technische Equipment installiert ist und auch die Zuschauer saßen, dem Modellschiff gefolgt ist. Am Ende der Strecke wurde wieder automatisch angelegt. MARIN ist mit zahlreichen Simulatoren und Testbecken ausgestattet und bietet daher vielfältige Möglichkeiten für regelungstechnische Erprobungen. Der nächste Vormittag wurde für ein vorwiegend regelungstechnisch orientiertes Meeting genutzt, bei dem sich die Control-Ingenieure von MARIN und die Vertreter des Lehrstuhls Regelungstechnik über ihre Erfahrungen mit maritimer Automation austauschten.

MED23 - Mediterranean Conference on Control and Automation 2023
Die 31. Mediterranean Conference on Control and Automation fand in diesem Jahr in Limassol auf Zypern statt. Vom 26. Juni bis zum 29. Juni wurden auf der Konferenz spannende Themen und aktuelle Forschungsschwerpunkte rund um das Thema der Automatisierungs- und Regelungstechnik präsentiert und diskutiert.
Die Konferenz bot dem internationalen Publikum von ca. 200 aufstrebenden Wissenschaftler*innen die Möglichkeit zum fachlichen Austausch und zum Knüpfen neuer Kontakte. Der Lehrstuhl für Regelungstechnik war dort durch Sven Lack und Johannes Marx vertreten. Beide präsentierten Ergebnisse ihrer aktuellen Forschung:
- Sven Lack, Erik Rentzow, Torsten Jeinsch: „Modelling and Workspace Analysis for an Underwater Manipulator“
- Johannes R. Marx, Robert Damerius, Torsten Jeinsch: „Linearized Model Predictive Control with Offset-Freeness for Trajectory Tracking on Inland Vessels“



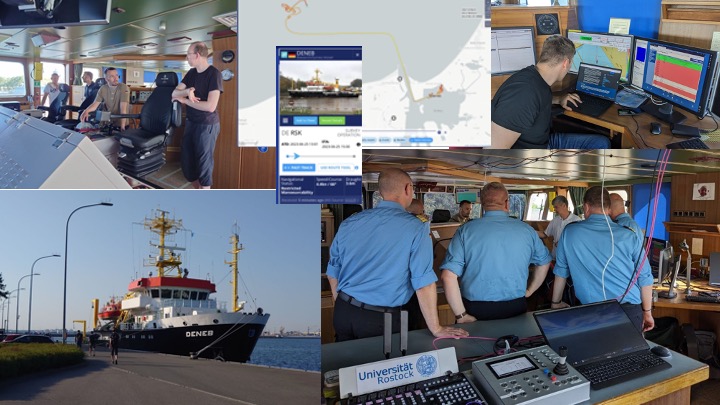
Forschungsaktivitäten GN2plus - Automatisierung des Forschungsschiffs DENEB
Am vergangenen Wochenende fanden auf dem Forschungsschiff DENEB intensive Experimente und Tests statt. Das Team der Universität Rostock konzentrierte sich dabei auf Experimente zur modellbasierten Aktuatorzuordnung, Driftversuche und Versuche zur Untersuchung des Windeinflusses im Automatikbetrieb.
Ab heute stehen automatisierte Transitmanöver bei unterschiedlichen Geschwindigkeiten und automatisierte Anlegemanöver auf dem Programm. Das Wetter mit aufkommenden böigen Winden stellt die von der Universität Rostock entwickelten Automatisierungslösungen und die gesamte Besatzung der DENEB vor eine anspruchsvolle Aufgabe.
Wir sind dem Bundesamt für Seeschifffahrt und Hydrographie und der gesamten Besatzung des Forschungsschiffes DENEB sehr dankbar für die außergewöhnliche Unterstützung bei der Durchführung unserer Studien und Experimente an Bord. Sie haben mit ihrer fachlichen Kompetenz wesentlich dazu beigetragen, dass die gelegentlich unkonventionellen Forschungsideen der Kontrollingenieure an Bord realisiert werden konnten.
An dieser Stelle möchte ich einen kurzen Ausblick auf den kommenden 22nd International Federation of Automatic Control World Congress 2023 in Yokohama geben. In der Sitzung TuC10.3 mit dem Titel "Autonomous Underwater and Surface Vehicles" werden wir in unserem Beitrag "Assistance-based automation of berthing maneuvers" die neuesten Ergebnisse aus dem Forschungsprojekt GN2plus und der laufenden Testkampagne vorstellen.
Die Arbeiten wurden mit Mitteln des Bundesministeriums für Wirtschaft und Klimaschutz (BMWK) gefördert und durch das DLR Raumfahrtmanagement unter dem Kennzeichen FKZ 50NA2304B unterstützt.

OCEANS 2023
Aus unserem Institut haben wir zu zweit an der OCEANS 2023 – Blue Oceans Planet Earth in Limerick, Irland mit unseren Präsentationen teilgenommen. Ian Karez hat seine Ergebnisse zur Nutzung von Lidar-Sensorik für unbemannte Fahrzeuge im maritimen Bereich vorgestellt. Agnes Schubert hat aus den projektübergreifenden Erfahrungen unseres Lehrstuhls von den Systemvoraussetzungen für das automatische Manövrieren von Wasserfahrzeugen gesprochen. Besonderes Highlight dabei die Ergebnisse des automatischen Anlegemanövers mit dem 52m langen Forschungsschiff DENEB in Zusammenarbeit mit dem BSH in Rostock. Die Konferenz wird von der IEEE Oceanic Engineering Society und der Marine Technology Society jedes Jahr organisiert und bietet eine breite Plattform, um sich in den maritimen Ingenieurwissenschaften auszutauschen. Da der Vorsitzende des lokalen Organisationskomitees, Daniel Toal, selbst Regelungstechniker ist, war dieser Zweig deutlich stärker vertreten als sonst. Deshalb haben wir viele nationale und internationale Projektpartner getroffen. Im Bild sind die Vertreter von der Universität Rostock und der TU Berlin zu sehen. Über die Zuhörer in unseren Sessions sind neue Verbindungen in die Niederlande und die USA entstanden.


Gemeinsames Symposium 2023 der Universitätsmedizin Rostock und der Fakultät für Informatik und Elektrotechnik
Gemeinsames Symposium 2023 der Universitätsmedizin Rostock und der Fakultät für Informatik und Elektrotechnik
Am Freitag den 09. Juni 2023 fand im Konrad-Zuse-Haus der Fakultät für Informatik und Elektrotechnik ein gemeinsames Symposium der Universitätsmedizin Rostock und der Fakultät für Elektrotechnik und Informatik statt.
Das Symposium wurde gemeinsam durch den Dekan der Universitätsmedizin, Prof. Dr. med. univ. Emil C. Reisinger, und dem Dekan der Fakultät für Elektrotechnik und Informatik, Prof. Dr.-Ing. habil. Mathias Nowottnick, eröffnet. Zwei Session mit insgesamt 18 Impulsvorträgen und drei Workshops zu den Themen Digitalisierung, Technologie und Automatisierung sowie Künstliche Intelligenz boten den Teilnehmern viel Raum für den fachlichen Austausch und angeregten Diskussionen.


Hochschulinformationstag Universität Rostock 3. Juni 2023
Am 3. Juni fand der Hochschulinformationstag der Universität Rostock statt. Der Lehrstuhl Regelungstechnik beteiligte sich mit einem Vortrag und 2 Exponaten an der gut besuchten Veranstaltung im neuen Gebäude der Elektrotechnik auf dem Südstadtcampus.
Unser Lehrstuhl stellte sich mit 2 Fahrzeugen vor:
- Mecanum wheel Fahrzeug mit Lidar - Die automatische Fahrzeugführung in unbekannten Umgebungen stellt insbesondere für Indoor-Applikationen eine große Herausforderung dar. Anhand eines Mecanumwheel-Fahrzeuges wird diese Aufgabe durch gleichzeitige Kartierung und Lokalisierung, sowie darauf aufbauender Pfadplanung beispielhaft gelöst.
- ROV (remotely operated underwater vehicle) - Ausgestellt wird ein Verbundsystem bestehend aus einem kleinen Unterwasserfahrzeug und einem Roboterarm. Eingesetzt wird dieses in der Forschung zur Untersuchung und technischen Kompensation von Kopplungskräften bei Manipulationsaufgaben in Unterwasserbereich.



Synergietreffen der DLR Explorer-Initiativen STE2023-I
Vom 24.-26.05.2023 fand in Bremen das Synergietreffen der DLR Explorer-Initiativen STE2023-I statt.
Die Konferenz konzentrierte sich auf den Austausch zwischen Projekten, insbesondere in den Bereichen Sensoren, Hardware, Autonomie und KI.
Der Lehrstuhl Regelungstechnik stellte in einem Vortrag und einem Poster das Neuvorhaben GALILEOnautic 2+ vor.
Der DIGITAL HUB Industry Bremen bot den perfekten Rahmen für unsere Veranstaltung, die von der Universität Bremen, dem Deutschen Zentrum für Luft und Raumfahrt e.V. und TOPAS Industriemathematik gemeinsam ausgerichtet wurde.


EINTAUCHEN IN DIE ZUKUNFT - Rostocker Perspektiven auf maritime Technologien

Am Donnerstag den 25. Mai 2023 um 18.00 Uhr lud die Universität Rostock gemeinsam mit der Hanse- und Universitätsstadt zur Veranstaltung
EINTAUCHEN IN DIE ZUKUNFT- Rostocker Perspektiven auf maritime Technologien in das Rostocker Rathaus ein.
Es war die Auftaktveranstaltung zur zweiten Staffel der Gesprächsreihe UNIVERSITÄT IM RATHAUS. Sie wurde von der Interdisziplinären Fakultät an der Universität gemeinsam mit der Hanse- und Universitätsstadt Rostock organisiert.
Neben Experten aus den Fachgebieten Meerestechnik und Schiffbau der Universität Rostock werden auch aus dem Blickwinkel der Regelungstechnik die Möglichkeiten, Grenzen und Herausforderungen maritimer Technologien betrachtet.
Nähere Informationen: https://www.inf.uni-rostock.de/inf/universitaet-rathaus/
International Interdisciplinary PhD Workshop 2023 und 9th International Symposium on Automatic Control 2023

An der Hochschule Wismar fand vom 03.-05. Mai 2023 der International Interdisciplinary PhD Workshop (I²PhDW) gemeinsam mit dem International Symposium on Automatic Control (AUTSYM) statt.
Vom Lehrstuhl Regelungstechnik nahmen zwei Mitarbeiter an der Fachveranstaltung teil und stellten dem internationalen Publikum ihre Forschungsergebnisse vor.
Nick Eisenblätter präsentierte in seinem Vortrag sein „Einstellverfahren für Volumenströme für die Minidialyse“ im Rahmen der Erforschung neuer Therapieverfahren basierend auf der extrakorporalen Blutreinigung mittels Dialysatoren am Fraunhofer-Institut für Zelltherapie und Immunologie Rostock.
Aktuelle Ergebnisse aus dem Verbundprojekt „MUM2“ (www.mum-project.de) veröffentlichte Carsten Rethfeldt in dem Beitrag „Optimization-based Actuator Allocation for Underwater Vehicles with Variable Buoyancy Systems“. Der Beitrag wurde mit dem Best Paper Award des Symposiums ausgezeichnet.
- Nick Eisenblätter, Sven Lack, Horst Krüsemann, Jacqueline Hofrichter, Torsten Jeinsch: „Einstellverfahren für Volumenströme für die Minidialyse“
- Carsten Rethfeldt, Sven Lack, Torsten Jeinsch: „Optimization-based Actuator Allocation for Underwater Vehicles with Variable Buoyancy Systems“


MAROS 2023 – von Thüringen in die Weltmeere
Am 27. und 28. April fand die Konferenz MAROS 2023 (Maritime Robotik und Sensorik) unter dem Dach der Gesellschaft für Maritime Technik (GMT) und des Fraunhofer IOSB-AST in der Vertretung des Freistaats Thüringen beim Bund in Berlin statt. Teilnehmende aus Wirtschaft, Politik, Verwaltung und Wissenschaft haben sich zu vielfältigen Themen der Maritimen Technik auch in Verbindung mit Automotive intensiv ausgetauscht. Vertreter des Lehrstuhls Regelungstechnik diskutierten mit zahlreichen Teilnehmern zukunftsorientierte systemtechnische Lösungen für komplexe, dynamische und zeitvariante Prozesse in den Bereichen Energieversorgung und Unterwasserrobotik. Schwerpunkte waren die Entwicklung von Unterwasserfahrzeugen bzw. -roboter zur Exploration sowie für Inspektions- und Manipulationsaufgaben an Unterwasserinfrastrukturen.
Bild1: Quelle: Fraunhofer IOSB-AST: Bundesministerium für Wirtschaft und Klimaschutz, Dieter Janecek, Koordinator der Bundesregierung für Maritime Wirtschaft und Tourismus
Bild2: Quelle: Fraunhofer IOSB-AST, (v.l.n.r.):
1) Fraunhofer Institute for Digital Media Technology IDMT, Christoph Sladeczek, Head of Virtual Acoustics
2) terra.blue, Dr. Walter L. Kuehnlein, Managing Advisor for Energy & Tech, Speaker, University Lecturer
3) Thüringer Ministerium für Wirtschaft, Wissenschaft und Digitale Gesellschaft (TMWWDG), Dr. Bernd Ebersold, Abteilungseiter Forschung, Technologie und Innovation
4) Stiftung OFFSHORE-WINDENERGIE, Andreas Mummert, Leiter Politik
5) Holger Klindt Consulting, Holger Klindt, Consultant, Leiter GMT-Arbeitsgruppe Maritime Sicherheit
6) Gesellschaft für Maritime Technik e.V., Petra Mahnke, Geschäftsführerin
7) Bundesministerium für Wirtschaft und Klimaschutz, Dieter Janecek, Koordinator der Bundesregierung für Maritime Wirtschaft und Tourismus
Bild3: Quelle: Lehrstuhl Regelungstechnik, (v.l.n.r.):
- Fraunhofer IOSB-AST, Dr. rer. pol. Marcel Reusch, Leiter Transfernetzwerk »Automotive goes Subsea«
- Gesellschaft für Maritime Technik e.V., Petra Mahnke, Geschäftsführerin



4. Mai 2023 - Lange Nacht der Wissenschaften in Rostock

Am 4. Mai fandt die diesjährige "Lange nacht der Wissenschaften 2023 in Rostock" statt.
Der Campus Südstadt und der Campus Stattmitte luden herzlich zu einer Reise in das Universum Wissenschaft ein.
Die lange Nacht der Wissenschaften bietet jedes Jahr die Gelegenheit, die Forschenden und Lehrenden zu treffen, ihnen Fragen zu stellen und ihnen über die Schulter zu schauen.
Unser Lehrstuhl stellte sich mit 2 Fahrzeugen vor:
- Mecanum wheel Fahrzeug mit Lidar - Die automatische Fahrzeugführung in unbekannten Umgebungen stellt insbesondere für Indoor-Applikationen eine große Herausforderung dar. Anhand eines Mecanumwheel-Fahrzeuges wird diese Aufgabe durch gleichzeitige Kartierung und Lokalisierung, sowie darauf aufbauender Pfadplanung beispielhaft gelöst.
- ROV (remotely operated underwater vehicle) - Ausgestellt wird ein Verbundsystem bestehend aus einem kleinen Unterwasserfahrzeug und einem Roboterarm. Eingesetzt wird dieses in der Forschung zur Untersuchung und technischen Kompensation von Kopplungskräften bei Manipulationsaufgaben in Unterwasserbereich.
Bild 2: Ella (7) und Tristan (9) steuern mit einem Controller einen Unterwasserroboter und greifen mit einem Greifarm ein Objekt.
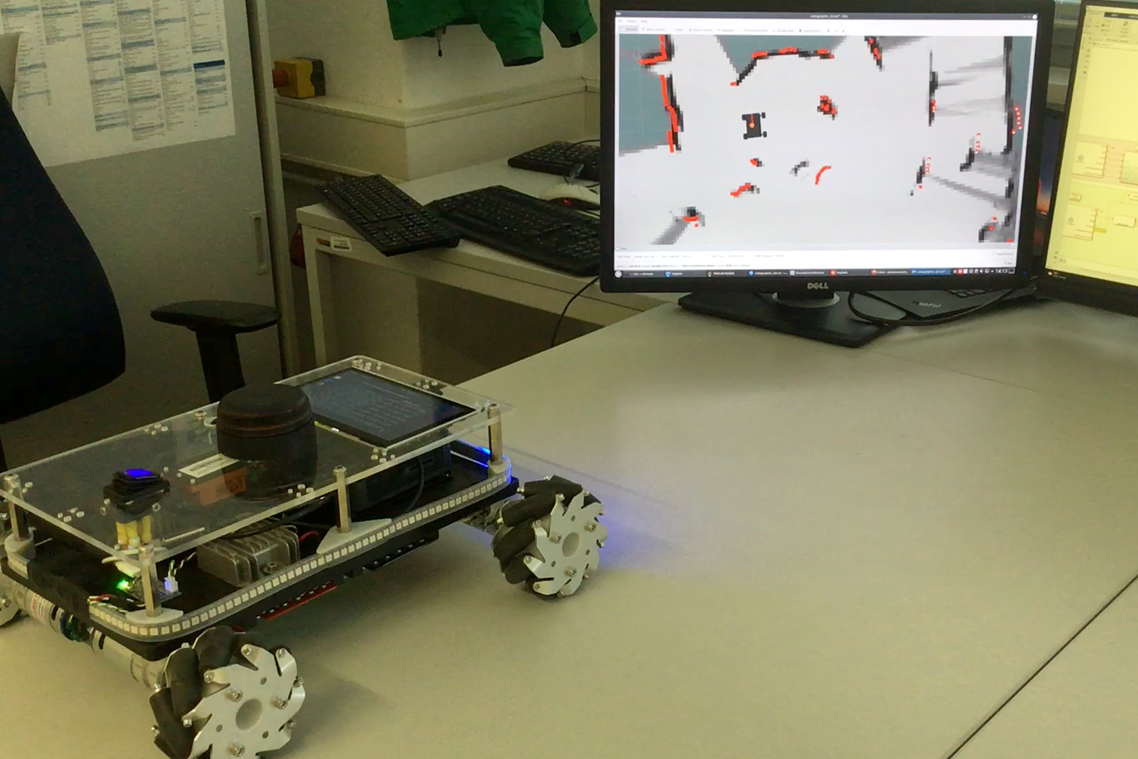
Erprobungen in der VWS Berlin
Vom 17.04. bis 21.04.2023 hatten wir die Möglichkeit mit unseren Partnern des MUM (www.mum-project.de) Konsortiums umfangreiche Erprobungen in der Versuchsanstalt für Wasserbau und Schiffbau (VWS) durchführen zu können. Insgesamt 3 ROV und 1 AUV waren an den Versuchen beteiligt, wobei allein der Lehrstuhl Regelungstechnik der Universität Rostock 2 ROV und das AUV besteuerte.
Ziele waren neben der Ermittlung der Fahrzeugwiderstände durch das Schleppen der Fahrzeuge auch ROV Manövrierversuche und Vortests zum automatisierten Greifen von Objekten.
Die exzellenten Versuchsanlagen in Berlin bieten hierfür ein hervorragendes Spielfeld, um die Technik an ihre Einsatzgrenzen zu bringen. Deshalb geht unserer ganz besonderer Dank an die Kollegen der TUB, die während der Versuche und darüber hinaus stehts mit Rat und Tat zur Seite standen.
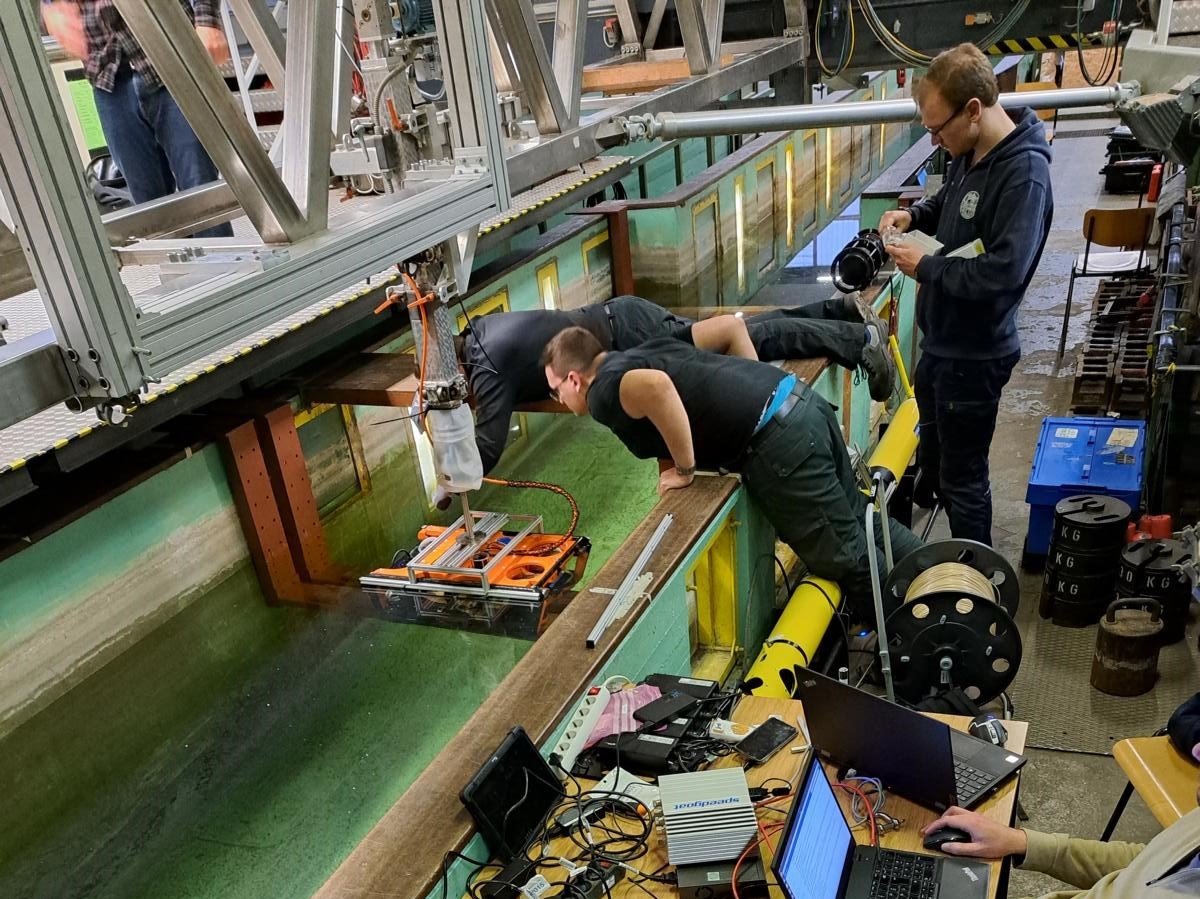
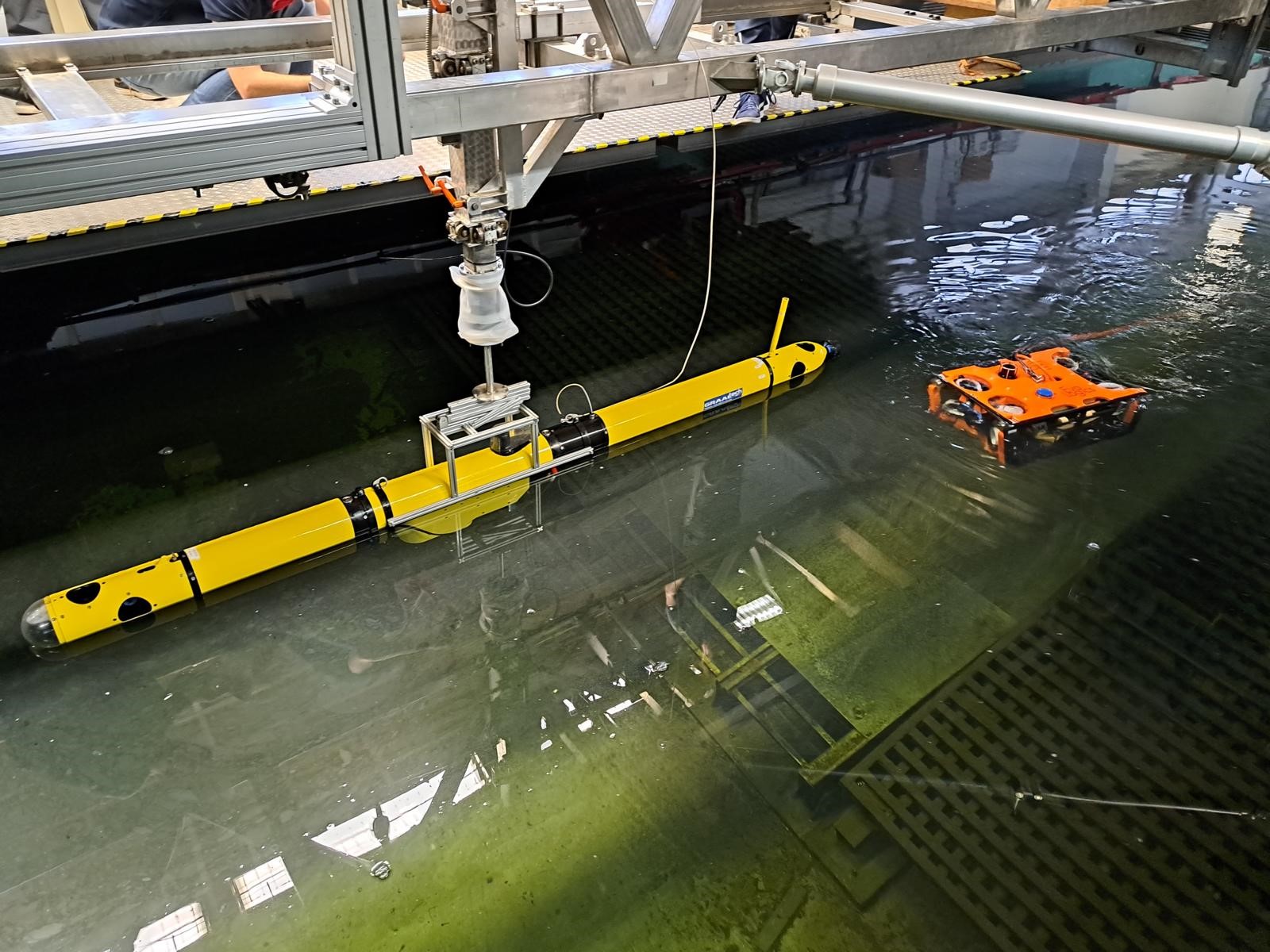
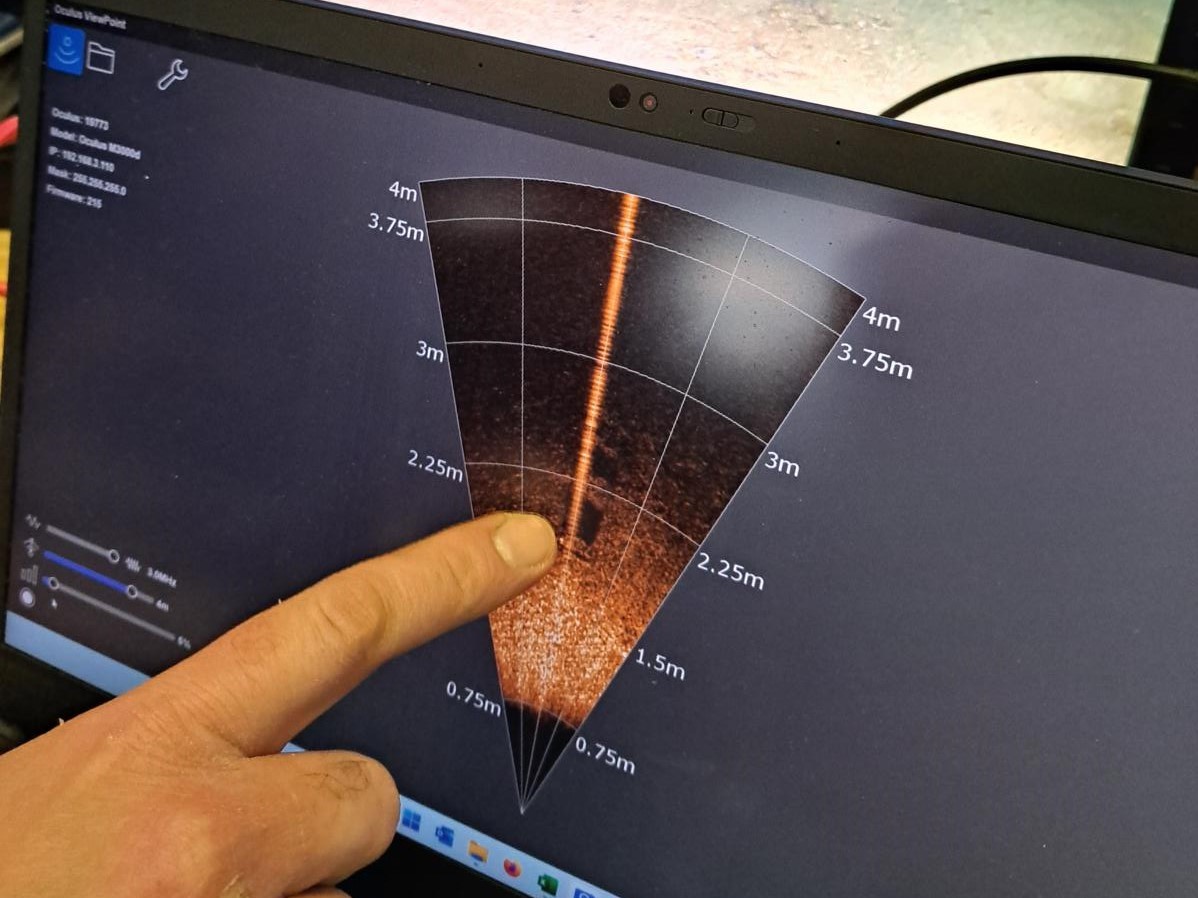

Kick-off Meeting von GALILEOnautic2plus

Am Donnerstag den 30. März 2023 fand das Kick-off Meeting für das Forschungsvorhaben „GN2plus - Vernetztes, kooperatives Manövrieren in sicherheitskritischen Bereichen“ statt.
Partner im Konsortium sind das Institut für Regelungstechnik der RWTH Aachen University und als Assoziierter Partner das Bundesamt für Seeschifffahrt und Hydrographie. Ziel des Vorhabens ist die Modulentwicklung zum Aufbau und der Umsetzung eines vernetzten Verkehrssystems, bestehend aus drei vernetzten Wasserfahrzeugen, wobei die notwendigen Manöver in beschränkten, sicherheitskritischen Revieren automatisiert durchgeführt werden. Die vernetzten Fahrzeuge sollen dabei kooperativ handeln und die nicht-vernetzten Verkehrsteilnehmer berücksichtigen können. Das vernetzte Navigations-Szenario baut auf den umfangreichen Entwicklungen aus dem Projekt GALILEOnautic 2 auf, so dass die etablierten Versuchsträger relevanter Fahrzeuggröße (u.a. Forschungsschiff Deneb) uneingeschränkt genutzt werden können.
Der Lehrstuhl Regelungstechnik der Universität Rostock widmet sich die Herausforderung: Lokale und zentrale Optimierung zur Trajektoriengenerierung und Bewegungsregelung der vernetzten Fahrzeuge.
Feierliche Einweihung des Neubaus „Elektrotechnik“ der Universität Rostock
Finanzminister Dr. Heiko Geue, Wissenschaftsministerin Bettina Martin, Prof. Dr. Wolfgang Schareck, Rektor der Universität Rostock, und Prof. Dr. Mathias Nowottnick, Dekan der Fakultät für Informatik und Elektrotechnik an der Universität Rostock, weihten am 29.03.2023 den Neubau „Elektrotechnik“ auf dem Südstadt-Campus der Universität Rostock feierlich ein.
Der Neubau beherbergt zukünftig das Institut für Nachrichtentechnik und das Institut für Angewandte Mikroelektronik und Datentechnik. Beide Institute ziehen somit vom Standort Warnemünde auf den Südstadtcampus. Zugleich bietet der Neubau den ca. 1.400 Studierenden der Fakultät für Informatik und Elektrotechnik ein modernes und innovatives Lehr- und Forschungsgebäude mit optimalen Bedingungen für eine forschungsnahe Lehre und hervorragender Forschungsbedingungen.
Das Institut für Automatisierungstechnik verbleibt als einziges Institut der Elektrotechnik am Standort Warnemünde. Aufgrund der weiterhin bestehenden räumlichen Trennung der Elektrotechnik, müssen die Studierenden auch zukünftig zu den jeweiligen Lehrveranstaltungen zwischen Warnemünde und dem Südstadtcampus pendeln.
Weitere Informationen zum Neubau sind auf den Internetseiten des für die Maßnahme zuständigen Staatlichen Bau- und Liegenschaftsamtes Rostock zu finden.


Die Zukunft der Binnenschifffahrt – digital und logistisch integriert
Am Mittwoch den 22. März 2023 fand in Hamburg das Fünfte Begleitforschungsgruppentreffen: „Die Zukunft der Binnenschifffahrt – digital und logistisch integriert“ statt.
Die Veranstaltung gab einen Überblick zu verschiedenen Forschungs- und Entwicklungsthemen in diesem Bereich und stellte damit verschiedene Ansätze zur Zukunftssicherung der Binnenschifffahrt vor.



Kick-off und offizieller Projektstart von SensorSOW
Am Dienstag den 21. März 2023 fand in Berlin bei der Berliner Hafen- und Lagerhausgesellschaft mbH (BEHALA) das Kick-off Meeting für das Forschungsvorhaben „SensorSOW – LIDAR-basierte Sensorapplikation zur Erkennung, Modellierung und Prädiktion des Bewegungsverhaltens anderer Verkehrsteilnehmer auf Binnenwasserstraßen“ statt.
Partner im Konsortium sind die Alberding GmbH und das Fachgebiet Entwurf Maritimer Systeme der Technischen Universität Berlin. Das Projektkonsortium wird die Funktionalität von LIDAR-, SONAR-, Kamera- und GNSS-Sensorik mittels bestehender Versuchsträger und Testschiffen im digitalen Testfeld Spree-Oder-Wasserstraße erproben, aufbereiten und in einem Assistenzsystem anschaulich bereitstellen.
Taufe des Forschungsschiffes ELLA
Am Freitag, dem 03.03.2023 wurde im Duisburger Hafen das Forschungsschiff ELLA getauft. ELLA wurde im Rahmen des Förderprogramms „Digitale Testfelder“ des BMDV gebaut. Sie ist ein speziell für die Anforderungen der Binnenschifffahrt konzipiertes Forschungsfahrzeug und soll einen einen wichtigen Beitrag zur Entwicklung des autonomen Fahrens leisten. Besonderes Augenmerk wird im praktischen Betrieb auf komplexe Manöver in engen Arealen gelegt, um künftig die Automatisierung von Hafenmanövern zu ermöglichen.


Kolloquium zur Digitalisierung in der Binnenschifffahrt
Vom 01. – 02. März 2023 fand auf dem Gelände der Bundesanstalt für Wasserbau in Karlsruhe das Kolloquium zur Digitalisierung in der Binnenschifffahrt statt. Das Kolloquium wurde gemeinsam ausgerichtet von der BAW, dem ISMT und DST. Zu Gast waren verschiedene Vertreter und Vertreterinnen aus Forschung, Politik und Wirtschaft.



Prof. Holger Korte zu Gast am Lehrstuhl Regelungstechnik

Am 01.03.2023 konnte der Lehrstuhl Regelungstechnik Prof. Holger Korte von der Jade Hochschule aus Elsfleth begrüßen. Prof. Korte, ein ehemaliger Mitarbeiter des Instituts für Automatisierungstechnik forscht seit vielen Jahren auf dem Gebiet der Schiffs- und Meerestechnik. In einem spannenden Vortrag konnten sich das Team des Lehrstuhls und weitere Interessierte über die Arbeit und aktuelle Forschungsarbeiten von Prof. Korte informieren. Schwerpunkt war das Thema: Hydrodynamische Masse – ein wichtiger Entwurfsparameter für meerestechnische Konstruktionen. In der anschließenden Fragerunde und den Diskussionen in kleineren Gruppen zeigte sich das gegenseitige Interesse an der Forschungsarbeit.
57. Regelungstechnisches Kolloquium in Boppard
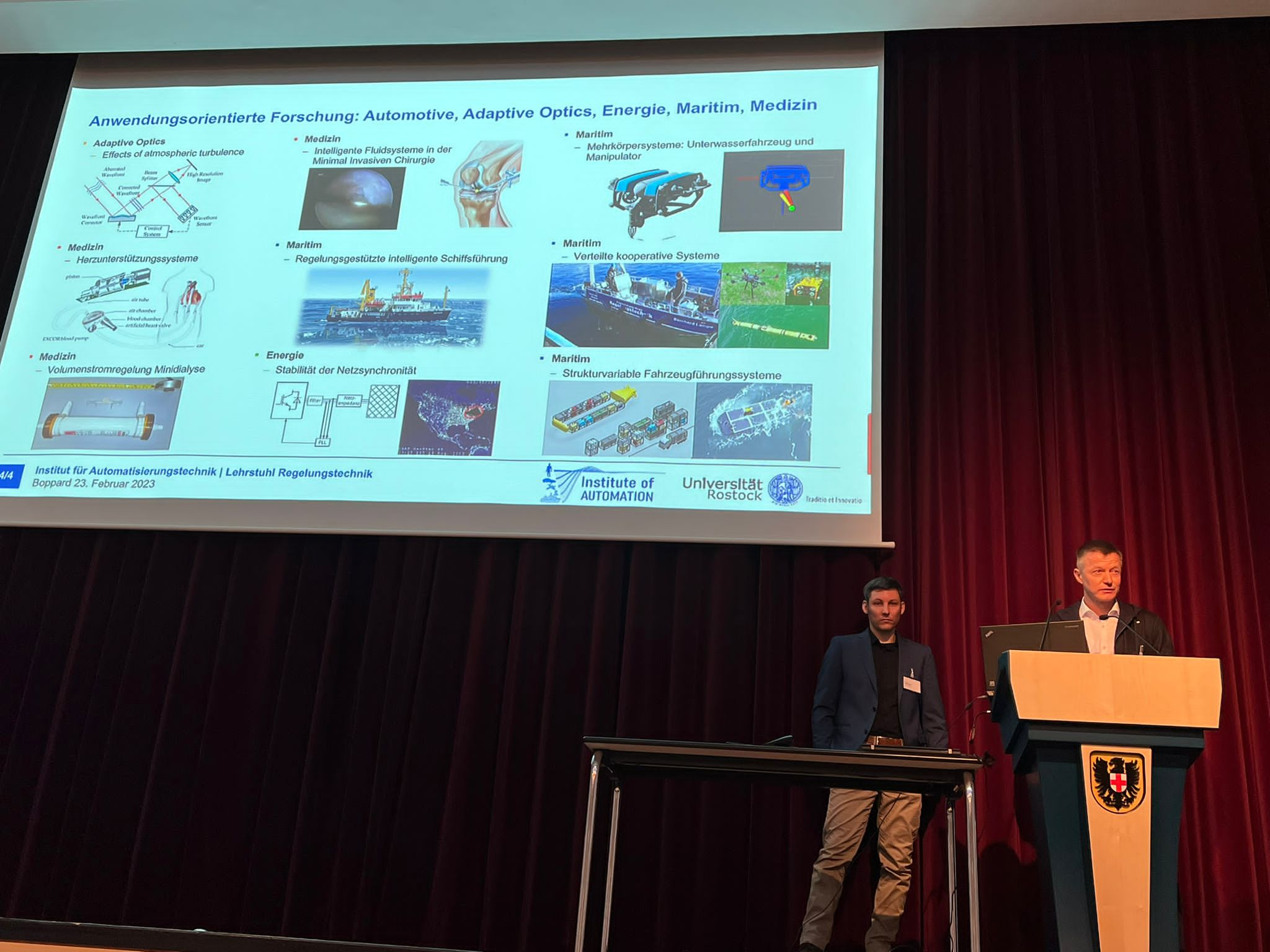
Das Regelungstechnische Kolloquium in Boppard ist der jährliche Treffpunkt der Regelungstechnik-Community des deutschsprachigen Raums. Etwa 80 Regelungstechnik-Professoren, dazu zahlreiche Automatisierungstechnik-Professoren, etwa 100 wissenschaftliche Mitarbeiter und einige Industrie- und Verbandsvertreter nehmen regelmäßig daran teil.
Im Unterschied zu Fachtagungen besitzt das Regelungstechnische Kolloquium primär den Charakter und die Funktion eines Forums, in dem die Universitäten und Forschungsinstitute des deutschsprachigen Raums neueste Ergebnisse und innovative Ideen aus Forschung und Entwicklung im Bereich der Mess-, Regelungs- und Automatisierungstechnik vorstellen und diskutieren können.
Ein weiteres Anliegen des Kolloquiums besteht darin, Vertreter aus Forschung und Lehre mit eingeladenen Gästen aus der Industrie zu einer beide Seiten befruchtenden Diskussion zusammenzuführen, um über aktuelle Frage- und Aufgabenstellungen der industriellen Praxis sowie die Anwendbarkeit neuer, leistungsfähiger Lösungsmethoden und -konzepte zu sprechen.
In diesem Jahr war der Lehrstuhl Regelungstechnik aus dem Institut für Automatisierungstechnik der Universität Rostock an der Reihe seine Lehr- und Forschungsgebiete vorzustellen. Anschließend präsentierte Dr. Tobias Hahn seine Forschungsergebnisse zur Automatisierung des Manövrierens von Wasserfahrzeugen und stelle sich den zahlreichen Fragen der fachkundigen Zuhörer.
Buch „Sampled-Data Control for Periodic Objects“
Seit dem 3. Februar 2023 ist das neue Buch „Sampled-Data Control for Periodic Objects“ von Efim N. Rosenwasser, Torsten Jeinsch und Wolfgang Drewelow im Springerverlag erschienen.
The book “Sampled-Data Control for Periodic Objects” is devoted to the problem of sampled-data control of finite-dimensional linear continuous periodic (FDLCP) objects. It fills a deficit in coverage of this important subject. The methods presented here are based on the parametric transfer matrix, which has proven successful in the study of sampled-data systems with linear time-invariant objects. The book shows that this concept can be successfully transferred to sampled-data systems with FDLCP objects. It is set out in five parts:
- an introduction to the frequency approach for the mathematical description of FDLCP objects including the determination of their structure and their representation as a serial connection of periodic modulators and a linear time-invariant object;
- construction of parametric transfer matrix for different types of open and closed sampled-data systems with FDLCP objects;
- the solution of problems of causal modal control of FDLCP objects based on the mathematical apparatus of determinant polynomial equations;
- consideration of the problem of constructing a quadratic quality functional for the H2-optimization problem of a single-loop synchronous sampled-data system with control delay;
- description of the general H2-optimization procedure.
Necessary mathematical reference material is included at relevant points in the book.
Sampled-Data Control for Periodic Objects is of use to: scientists and engineers involved in research and design of systems of systems with FDLCP objects; graduate students wishing to broaden their scope of competence; their instructors; and mathematicians working in the field of control theory.

Tag der offenen Tür im Anwendungszentrum Regelungstechnik
Am Montag den 19.12.2022 lud der Lehrstuhl Regelungstechnik zu seinem traditionell jährlich stattfindenden Tag der offenen Tür in das Anwendungszentrum ein.
In diesem Jahr öffnete das Anwendungszentrum Regelungstechnik seine Türen für alle Semester der Bachelor- und Masterstudiengänge der Informatik und Elektrotechnik.
Es konnten die autonomen und ferngesteuerten Über- und Unterwasserfahrzeuge, Bodeneffektfahrzeuge, Rover und Dronen besichtigt und ausprobiert werden. Der Laserscanner konnte beim Vermessen erlebt werden und die Geschicklichkeit auf dem Fahrrad mit Hinterradlenkung wurde auf die Probe gestellt.
Wir freuen uns schon auf den nächsten Tag der offenen Tür.



STATUSTAGUNG MARITIME TECHNOLOGIEN 2022
Der Projektträger Jülich lud im Auftrag des Bundesministeriums für Wirtschaft und Klimaschutz (BMWK) zur Statustagung „Maritime Technologien“ am 12. und 13. Dezember 2022 in Berlin ein. Die Konferenz fand in diesem Jahr im Steigenberger Hotel Am Kanzleramt als Präsenzveranstaltung statt und bot ausgewählte Beiträge zu erfolgreichen Projekten aus dem Maritimen Forschungsprogramm des BMWK. Podiumsdiskussionen und Impulsvorträge stellten hochaktuelle Themen wie die klimaneutrale Schifffahrt, Munitionsaltlasten im Meer und die Bedeutung maritimer Infrastrukturen in den Fokus.
Der Lehrstuhl Regelungstechnik stellte seine Forschungsergebnisse im Rahmen einer gemeinsamen Präsentation des Verbundforschungsvorhabens A-SWARM – Autonome elektrische Schifffahrt auf Wasserstrassen in Metropolenregionen vor.
Fotos von:
Claudia Müller, MdB - Grußwort der Koordinatorin der Bundesregierung für Maritime Wirtschaft und Tourismus
Susanne Korich | Projektträger Jülich - Maritimes Forschungsprogramm: Von der Idee zum Erfolg
Dr. Christian Masilge | Schiffbau-Versuchsanstalt Potsdam GmbH - A-SWARM – Autonome elektrische Schifffahrt auf Wasserstrassen in Metropolenregionen



ROV Versuche im Anwendungszentrum Regelungstechnik
Am 06.12. und 07.12. fanden im Anwendungszentrum Regelungstechnik im Rahmen des MUM2 Projektes Versuche mit den Kollegen vom DLR aus Bremerhaven statt.
Bei den Versuchen ging es um die Erzeugung von Datensätzen mit Kamera- und Sonartechnik von referenzierten Objekten unter Wasser unter Einsatz von ROVs.
Die Daten sollen verwendet werden, um Verfahren anzulernen, die es ermöglichen sollen die Objektposition und -lage für eine automatisierte Greifoperation mit ROVs aus Kamera- und Sonardaten zu schätzen.

Das Wissen über den Ozean ist ein Schlüssel für das Erreichen der UN-Nachhaltigkeitsziele – Meeresforschung ist Klimaforschung und Vorsorgeforschung, auch für Ernährungs- und Energiesicherheit
Im Jahr 2019 hat das Bundesland Mecklenburg-Vorpommern gemeinsam mit den anderen norddeutschen Bundesländern und dem Bund die Deutsche Allianz Meeresforschung (DAM) gegründet.
Am 23.11.2022 lud die Deutsche Allianz Meeresforschung zum Parlamentarischen Abend in das Staatstheater Schwerin ein, um ihre Arbeit vorzustellen. Das Wissen über den Ozean ist ein Schlüssel für das Erreichen der UN-Nachhaltigkeitsziele. Die Meeresforschung ist Klimaforschung und Vorsorgeforschung, auch für die Ernährung und Energiesicherheit und stand an diesem Abend im Fokus der Veranstaltung.
Der Lehrstuhl Regelungstechnik präsentierte ausgewählte Exponate ihrer automatisierten Unterwasserfahrzeugen. Autonome (AUV) und kabelgebundene (ROV) Unterwasserfahrzeuge werden häufig für flächendeckende Datengenerierung und gezielte Beprobungen eingesetzt.



15 Jahre Interdisziplinäre Fakultät an der Universität Rostock
Am 11. Oktober 2007 war die Interdisziplinäre Fakultät in einem feierlichen Akt in der Universitätskirche gegründet worden. Zum Gründungsdekan war Professor Udo Kragl, der jetzige Prorektor für Forschung und Wissenstransfer, gewählt worden. Mit der Gründung der Interdisziplinären Fakultät hatte der damalige Rektor der Universität Rostock Professor Thomas Strothotte einen neuen Weg beschritten. Das derzeit deutschlandweit einmalige Modell einer virtuellen Fakultät ging 2007 mit drei Departments an den Start: Leben, Licht & Materie, Altern des Individuums und der Gesellschaft sowie Maritime Systeme. Im Jahr 2010 kam ein weiteres Department hinzu: Wissen – Kultur – Transformation.
Der Lehrstuhl Regelungstechnik war im Rahmen seiner Mitgliedschaft im Department Maritimer Systeme mit den Unterwassergeräteträgern
- Autonomous Underwater Vehicle – AUV
- Remotely Operated Vehicles – ROV (Blue ROV und EVO ROV)



8th Hydrodynamic Symposium
Vom 04.-06. Oktober 2022 nahmen Mitarbeiter des Instituts für Automatisierungstechnik am achten Hydrodynamic Symposium in Heidenheim teil. In zahlreichen interessanten Vorträgen wurden die Schwerpunkte: Sicherheit bei der Schiffsassistenz, mehr Einsatztage in schwerem Wetter beim Dynamischen Positionieren, geringe Treibstoffkosten sowie leise und robuste Antriebe intensiv diskutiert. Die erfolgreichen Forschungs- und Entwicklungsaktivitäten in den Verbundprojekten DPMotion und DPII des Instituts für Automatisierungstechnik boten viel Gesprächsstoff und neue Anregungen für zukünftige Forschungsvorhaben.



Breaking the Surface 2022 in Kroatien
Nach zwei Jahren Pause aufgrund der Coronapandemie nahm in diesem Jahr wieder ein Kontingent aus Rostock an dem „Breaking the Surface“ Workshop in Biograd na Moru, Kroatien teil. Der bereits zum vierzehnten Mal stattfindende Workshop, welcher die Themengebiete maritime Robotik, Meeresbiologie, Meeresarchäologie, Meeresgeologie und die maritime Sicherheit vereint, fand dieses Jahr vom 25. September bis zum 02. Oktober statt. Die Teilnehmer des Instituts nutzten diese Plattform zum Erfahrungsaustausch mit zahlreichen Experten zur geplanten Explorations- und Teststrecke für autonome Unterwasser-Robotersysteme im Anwendungszentrum Regelungstechnik. Das IAT wurde dieses Jahr durch Johannes Marx, Ian Karez, Sven Lack, Martin Kurowski und Torsten Jeinsch vertreten.


Team des Lehrstuhls Regelungstechnik gewinnt internationalen Wettbewerb im Unterwasserlokalisieren



Mit ihrer ausgeklügelten Technik zur Lokalisierung unter Wasser konnten Forschende der Universität Rostock und des Leibniz-Instituts für Ostseeforschung Warnemünde (IOW) bei der so genannten „Underwater Localization Challenge“ überzeugen. Der Wettbewerb im Bereich Unterwasserlokalisiation fand im Rahmen des internationalen, interdisziplinären Workshops für maritime Robotik und Anwendungen mit dem Titel „Breaking the Surface” in Biograd na Moru, Kroatien mit über 200 Teilnehmenden aus 22 Nationen statt. Dank der Unterstützung des Rostock International House konnte die Reise der drei Doktoranden von der Universität Rostock und deren Teilnahme am Workshop vom 25. September bis 2. Oktober finanziert werden.
Das Rostocker Team mit den Promotionsstudierenden Greta Markfort (IOW) sowie Sven Lack, Johannes Marx und Ian Karez (Lehrstuhl für Regelungstechnik der Universität Rostock) setzten sich trotz schwieriger Wetterbedingungen durch. Ihnen gelang es, den internationalen Wettbewerb zum Auffinden eines im Meer versenkten Senders in allen drei Wertungen – exakt, effizient und neuartig – für sich zu entscheiden. Die von ihnen entwickelte innovative und bisher eher unkonventionelle Methodik, die auf einer schrittweisen Annäherung an die mathematische Lösung des Problems basiert, führte schlussendlich zum genauesten Positionsergebnis mit einer Abweichung von nur dreißig Metern zur wahren Position.
Ihre Vorgehensweise durfte das Siegerteam dem großen Workshop-Publikum abschließend vorstellen. „Wir freuen uns sehr über das Ergebnis, zumal wir als letztes Team antraten, als der Wind schon enorm auffrischte und daher die Bedingungen für die Ortung des Unterwassersenders nicht optimal waren,“ sagt Sven Lack, Doktorand am Lehrstuhl Regelungstechnik der Universität Rostock. Betreuer Prof. Torsten Jeinsch ergänzt: „Ich bin sehr stolz auf unser Team, das mit seiner Leistung nicht nur die Experten der Unterwasserakustik überzeugen konnte. Dies bestätigt wieder einmal die sehr gute ingenieurwissenschaftliche Ausbildung an der Universität Rostock.“
Ortung und Kommunikation unter Wasser ist alles andere als trivial. Denn elektromagnetische Wellen, die beispielsweise für Satellitennavigation, Radio oder WLAN eingesetzt werden, werden im Wasser deutlich stärker gedämpft. Daher ist ein Einsatz dieser Technologien zur Kommunikation und Positionsbestimmung im Wasser nicht möglich. Mit Hilfe von Techniken der sogenannten Unterwasserlokalisierung, die auf der Laufzeitmessung von akustischen Signalen basiert, können beispielsweise Taucher oder Roboter, die Schallwellen aussenden, im Wasser leichter aufgefunden werden. Die akustische Unterwasserlokalisierung bringt jedoch einige Herausforderungen mit sich. So stellt sich zum Beispiel die Frage, wie Schwankungen der Schallgeschwindigkeit aufgrund von unterschiedlichen Dichte- und Temperaturverhältnissen in der Tiefe überwunden werden können und wie sich aufgrund dessen die Laufzeit eines Signals unter Wasser verändert.
Die so genannte „Underwater Localization Challenge” fand im Rahmen des 14. Workshops „Breaking the Surface” statt. Die Wettbewerbsaufgabe bestand darin, einen untergetauchten akustischen Sender in der Adria vor Biograd na Moru in einem Gebiet von 800 mal 800 Metern zu orten. Die sechs international besetzten Teams erhielten für die Ausbringung der Messtechnik jeweils ein Boot, um ihre spezielle Lokalisierungsmethode innerhalb einer Stunde anzuwenden. Zur Lokalisierung versenkten die Teams zunächst drei Mikrofone in selbst bestimmten geometrischen Anordnungen im Wasser. Aufgrund der jeweils unterschiedlichen Entfernung zwischen dem Sender und den Mikrofonen ergeben sich abweichende Empfangszeiten. Diese werden beeinflusst durch die Schallgeschwindigkeit im Wasser, die Synchronisation der Mikrofone und die Position des akustischen Senders. Aus diesen akustischen Rohdaten können dann die jeweilige Entfernung zum Sender und die dazugehörige Schallgeschwindigkeit berechnet und damit schließlich der Standort des Senders ermittelt werden.
Promotionsverteidigung Dr.-Ing. Michèle Schaub

Am 21. September 2022 verteidigte Frau Dr.-Ing. Michèle Schaub erfolgreich ihre Dissertationsschrift zum Thema „Beitrag zur Vorhersage von Partikelemissionen aufgrund von Schiffsmanövern unter Verwendung Künstlicher Neuronaler Netze “ an der Fakultät für Maschinenbau und Schiffstechnik der Universität Rostock .
Mitglieder der Promotionskommission waren: Prof. Buchholz (Vorsitzender) - Universität Rostock, Prof. Müller - Universität Rostock, Prof. Jeinsch - Universität Rostock, Prof. em. Benedict - HS Wismar, Prof. Kornev - Universität Rostock.
Herzlichen Glückwunsch!
14th IFAC Conference on Control Applications in Marine Systems, Robotics and Vehicles
Vom 14.-16. September 2022 fand an der Technical University of Denmark in Kongens Lyngby die 14th IFAC Conference on Control Applications in Marine Systems, Robotics and Vehicles statt.
Der Lehrstuhl Regelungstechnik war mit dem Beitrag Reference Tracking Control for Maneuvering Vessels considering Input Delay vertreten.
Hahn, T., Rethfeldt, C. Jeinsch, T.: „Reference Tracking Control for Maneuvering Vessels considering Input Delay”



4th AISS Autonomous Inland and Short Sea Shipping Conference
Vom 19.-22. September 2022 fand am DST – Development Centre for Ship Technology and Transportsystems in Duisburg die 4th AISS Autonomous Inland and Short Sea Shipping Conference statt.
Der Lehrstuhl Regelungstechnik war mit dem Beitrag A-SWARM Autonomous Electric Shipping on Waterways in Metropolitan Regions vertreten.
Marx, J., Damerius, R., Kolewe, B., Jeinsch, T.: „ A-SWARM Autonomous Electric Shipping on Waterways in Metropolitan Regions”
Erprobung von Assistenz- und Regelungssystemen auf dem Forschungsschiff Deneb
Teams der Hochschule Wismar und der Universität Rostock hatten vom 05.09.-07.09.22 die Möglichkeit an Versuchsfahrten mit dem Forschungsschiff Deneb des BSH teilzunehmen. Ziel waren Untersuchungen zur Anpassung der Steuerungsstrategie für das assistierte und automatisierte Anlegen unter Berücksichtigung von Umwelteinflüssen auf Basis von nautischem Expertenwissen.Anschließend wurden zahlreiche manuelle, assistierte und automatisierte Anlegemanöver gefahren, um statistische Eigenschaften abzuleiten.
Ein großer Dank geht an das BSH für die Möglichkeiten zur Erprobung auf der Deneb und natürlich an die gesamte Mannschaft der Deneb für die tolle Unterstützung und Ausdauer während der Erprobung der Assistenz- und Regelungssysteme.


Demonstration und Abschlusserprobung A-SWARM im Berliner Westhafen
Vom 29. August bis zum 02. September 2022 fand im Rahmen des Verbundprojektes A-SWARM die abschließende Erprobung und Demonstration der Ergebnisse im Berliner Westhafen statt. Neben den Tests der im Projekt entwickelten Methoden und Algorithmen zur Trajektorienplanung, Positionsregelung und Kollisionsvermeidung wurden den anwesenden Vertretern des Projektträgers PtJ auch die Ergebnisse anschaulich in realen Situationen vorgeführt. Der Experimentalkatamaran „Bernhard Lampe“ des Lehrstuhls diente hier als mobile Basis und zur Darstellung anderer Verkehrsteilnehmer in Begegnungs- und Überholsituationen. Auch die "Die Zeit" war vor Ort und berichtete.



Promotionsverteidigung Dr.-Ing. Tobias Hahn

Am 15. Juli 2022 verteidigte Herr Dr.-Ing. Tobias Hahn erfolgreich seine Dissertationsschrift zum Thema „Beitrag zur Identifikation des Manövrierverhaltens von Wasserfahrzeugen für den Entwurf von Assistenzfunktionen“.
Mitglieder der Promotionskommission waren: Prof. Dr. van Rienen - Universität Rostock, Prof. Dr. Torsten Jeinsch - Universität Rostock, Prof. Dr. Maksoud - TU Hamburg, Prof. Dr. Cai - Universität Rostock, Prof. Dr. Kühn - Universität Rostock, Prof. Dr. Weber - Universität Rostock, Prof. Dr. Wolkenhauer - Universität Rostock
Herzlichen Glückwunsch!
MED22 - Mediterranean Conference on Control and Automation
Die bereits 30. Auflage der Mediterranean Conference on Control and Automation fand in diesem Jahr in Athen statt. Vom 28. Juni bis zum 01. Juli wurden auf der Konferenz spannende Themen und aktuelle Forschungsschwerpunkte rund um das Thema der Automatisierungs- und Regelungstechnik präsentiert und diskutiert.
Auch der Lehrstuhl Regelungstechnik war dort mit einer kleinen Delegation vertreten. Neben den vier Präsenzvorträgen von Agnes Schubert, Ian Karez, Sven Lack und Johannes Marx gab es auch einen Onlinebeitrag von Robert Damerius.
Der direkt am Mittelmeer gelegene Tagungsort im Stadtteil Vouliagmeni bot neben dem fachlichen Austausch auch die Möglichkeit zur Knüpfung neuer Kontakte für zukünftige Zusammenarbeiten.

DLR Science Summer
Am 01.07.2022 waren Mitarbeiter des Lehrstuhls Regelungstechnik der Einladung des Deutschen Zentrums für Luft- und Raumfahrt (DLR) zum Science Summer nach Neustrelitz gefolgt.
Seit 30 Jahren ist Neustrelitz einer von 30 Standorten des DLR. In sechs Einrichtungen und Forschungsinstituten konzentrieren sich die Forschungs- und Entwicklungsarbeiten auf die Themen Weltraumwetter, Satellitendatenempfang, Satellitenfernerkundung, Navigation sowie maritimer Verkehr und maritime Sicherheit.
Aus diesem Anlass lud das DLR zum Science Summer Neustrelitz ein. Dort wurde auf die erfolgreiche Entwicklung des Standortes zurückgeblickt sowie über aktuelle Projekte aus der Maritimen Sicherheitsforschung, Weltraumwetterforschung und des Deutschen Fernerkundungsdatenzentrums informiert. Den Schlusspunkt der Veranstaltung bildete die Einweihung einer neuen Antenne für den Datenempfang zukünftiger Missionen.



Workshop - Master-Studiengang Schiffs- und Meerestechnik in Rostock
Am 30.06.2022 nahmen Mitarbeiter des Lehrstuhls Regelungstechnik am Workshop zum Masterstudiengang Schiffs- und Meerestechnik im Rahmen des OCEANT TECHNOLOGY CLUSTER – OCEAN TALENTS teil.
Die Universität Rostock entwickelt zurzeit einen internationalen, englischsprachigen Masterstudiengang Schiffs- und Meerestechnik, der innerhalb der nächsten Jahre den bestehenden Studiengang ersetzen soll. Die Umstellung soll auch dazu genutzt werden, die Inhalte des Studiengangs mit den aktuellen und zukünftigen Bedürfnissen der maritimen Industrie abzustimmen.
Präsentation zur Common Issue Day / RIS – Expertenwoche
Am Mittwoch den 29.06.2022 wurde den Teilnehmern der CESNI RIS-week (internationale Konferenz zur Binnenschifffahrtsinformationstechnologien) ein Einblick in das aktuelle Forschungsvorhaben A-SWARM - Autonome elektrische Schifffahrt auf Wasserstraßen in Metropolregionen ermöglicht. Im Becken 1 des Westhafens der BEHALA in Berlin präsentierte das Projektkonsortium ausgewählte Szenarien zur Trajektorienplanung, Positionsregelung und Kollisionsvermeidung.



Rund 1,33 Millionen für Verbundprojekt zur Digitalisierung der Schifffahrt
Am 28. Juni 2022 hat Dr. Volker Wissing, Bundesminister für Digitales und Verkehr, dem Projektkonsortium „SensorSOW – LIDAR-basierte Sensorapplikation zur Erkennung, Modellierung und Prädiktion des Bewegungsverhaltens anderer Verkehrsteilnehmer auf Binnenwasserstraßen“ die Förderurkunde überreicht. Partner im Konsortium sind die Universität Rostock mit Professor Torsten Jeinsch vom Lehrstuhl Regelungstechnik, die Alberding GmbH und die TU Berlin.
Ziel des Vorhabens ist es, Sensor- und Assistenzsysteme zur Bestimmung der Schiffs- und Verkehrslage sowie der Fahrrinne unter Wasser zu entwickeln und zu erproben, um den Automatisierungsgrad der Schifffahrt zu steigern. Das Projektkonsortium erhält eine Gesamtfördersumme von rund 1,33 Millionen Euro für eine Projektlaufzeit von zwei Jahren. Die Funktionalität der Sensorik, bestehend aus LIDAR-, SONAR-, Kamera- und GNSS-Sensorik soll in diesem Zeitraum mittels bestehendem Versuchsträger und Testschiffen im digitalen Testfeld Spree-Oder-Wasserstraße erprobt, aufbereitet und in einem Assistenzsystem anschaulich bereitgestellt werden.
Über das Förderprogramm zur Entwicklung von Digitalen Testfeldern an Bundeswasserstraßen stellt das Bundesministerium für Digitales und Verkehr bis Ende 2024 insgesamt rund 34 Millionen Euro bereit, um Industrie und Forschung bei der Erprobung automatisierter Systeme für die Schifffahrt zu unterstützen.
Mehr dazu auch unter: https://www.bmvi.de/SharedDocs/DE/Pressemitteilungen/2022/038-wissing-projekt-sensorsow-auf-spree-oder.html
Quelle:


Kulturtipps vom 24.06.2022: Autonome Schifffahrt
Der Lokalsender MV1 bat am 23.06.2022 um ein Interview, um nach der Taufe unseres Experimentalkatamarans mehr über die Herausforderungen des Multirobotersystems zu erfahren.
Dazu traf sich Tom Draheim von MV1 mit Dr. Martin Kurowski zu einer kurzen lockeren Gesprächsrunde im Anwendungszentrum Regelungstechnik. Zum Nachhören und Ansehen finden Sie den Beitrag bei den Kulturtips zur Autonomen Schifffahrt.
Video von MV1: https://www.youtube.com/watch?v=tvQZ29aqtf4


Treffen Parlamentsgruppe Binnenschifffahrt im Westhafen Berlin
Am Montag den 20. Juni 2022 wurde der Parlamentsgruppe Binnenschifffahrt im Westhafen der Berliner Hafen- und Lagerhausgesellschaft (BEHALA) das Forschungsprojekt „A-SWARM Autonome elektrische Schifffahrt auf Wasserstrassen in Metropolenregionen“ vorgestellt. Neben einem Vortrag wurde demonstriert, wie mit autonomen Schiffseinheiten künftig im städtischen Raum Güter von den überlasteten Straßen aufs Wasser verlagert werden könnte.

Schiffstaufe unseres Experimental-Katamarans "Berndhard Lampe" der Universität Rostock
Am 16. Juni fand die Schiffstaufe des neuen Experimental-Katamarans der Universität Rostock statt. Zukünftig kann die „Bernhard Lampe“ sogar unbemannt auf der Ostsee unterwegs sein und Aufgaben der Meeresforschung übernehmen.
Der neue, hoch manövrierfähige Experimental-Katamaran „Bernhard Lampe“ ist Grundlage eines zukünftigen Multirobotersystems – einzigartig in Mecklenburg-Vorpommern. Ausgerüstet mit zwei Unterwasserfahrzeugen und einer Drohne kann er autonom, also ohne Steuermann an Bord, beispielsweise Messungen von Wassertemperatur und Salzgehalt der Ostsee vornehmen.
Ziel von Professor Torsten Jeinsch, Koordinator des autonomen Multirobotersystems vom Rostocker Lehrstuhl Regelungstechnik, ist es, „den Katamaran zukünftig im Verbund mit weiteren Messfahrzeugen von meinem Büro aus in der Ostsee auf Position zu bringen. So müssten unsere Kolleginnen und Kollegen aus der Meeresforschung nicht mehr selbst auf See, um regelmäßig Wasser- oder Sedimentproben aus der Ostsee zu entnehmen.“
Als Geräteträger und Arbeitsboot verfügt die „Bernhard Lampe“ über zwei leistungsstarke Jet-Motoren, einen Bordkran und eine Winde. Die digitalisierten Schnittstellen zur Antriebstechnik, Navigations- und Umweltsensorik erlauben eine Kombination mit weiteren hochautomatisierten und autonomen Forschungsgeräten.
Bereits Mitte Oktober 2020 wurde die gemeinsam vom Land und der Universität geförderte „Bernhard Lampe“ vom Rostocker Unternehmen Nordland Hansa GmbH an den Lehrstuhl Regelungstechnik der Universität Rostock übergeben. Die Taufe des automatisierten Katamarans musste aufgrund der pandemiebedingten Einschränkungen auf Juni 2022 verschoben werden. Der Name „Bernhard Lampe“ wurde in Erinnerung an den früheren Lehrstuhlinhaber der Regelungstheorie gewählt. Mit der Taufzeremonie kann die „Bernhard Lampe“ nun auch offiziell zu Wasser gelassen werden. Die Schiffstaufe fand durch die Taufpatinnen Bianca und Ida Lampe – Tochter und Enkeltochter des bereits verstorbenen Ingenieurwissenschaftlers – im Anwendungszentrum Regelungstechnik der Universität Rostock statt.
„Ich freue mich über das würdigende Gedenken von Professor Bernhard Lampe. Die Universität Rostock verfügt nun über einen hochmodernen Forschungskatamaran mit zeitgemäßer Technik. Es verstärkt die Forschungskompetenz der Fakultät auf dem Gebiet der Meeresforschung nachhaltig“, so der Rektor der Universität Rostock, Professor Wolfgang Schareck.
Professor Torsten Jeinsch unterstreicht die hervorragende Zusammenarbeit im gesamten Team: „In Kooperation mit den beteiligten Unternehmen konnten wir die Algorithmen für die unbemannte Schifffahrt in den vergangenen Jahren so weiterentwickeln, dass eine autonome Forschungsausfahrt in Zukunft möglich sein wird.“
Quelle:



11th IFAC Symposium on Fault Detection Supervision and Safety (SAFEPROCESS)
Vom 08. bis 10. Juni 2022 fand das 11th IFAC Symposium on Fault Detection Supervision and Safety in Pafos, Zypern statt. Der Lehrstuhl Regelungstechnik war mit dem Beitrag „Application of Hidden Markov Models for Fault Detection in Automotive Engines ” vertreten.
- Salehian, M., Haghani, A., Jeinsch, T.: „Application of Hidden Markov Models for Fault Detection in Automotive Engines”


Erprobung im Verbundprojekt A-SWARM
Vom 07. bis zum 10. Juni 2022 fand im Rahmen des Verbundprojektes A-SWARM die nächste Erprobung im Berliner Westhafen auf dem Gelände des Projektpartners BEHALA statt. Schwerpunkt der Erprobung war die Testung der entwickelten Algorithmen zur Trajektorienplanung, Positionsregelung und Kollisionsvermeidung. Mit dabei war diesmal der Experimentalkatamaran „Bernhard Lampe“ des Lehrstuhls. Er diente als mobile Basis und zur Darstellung anderer Verkehrsteilnehmer in Begegnungs- und Überholsituationen.




Projekttreffen im Verbundprojekt DigitalSOW
Im Rahmen des Projektes DigitalSOW fand am 28.04.2022 ein Treffen der Projektpartner Alberding GmbH und der Universität Rostock statt.
Grund des Austauschs in Rostock war die Vorstellung der verschieden Versuchsträger im Anwendungszentrum Regelungstechnik sowie die Präsentation der Sensorsysteme und der Simulationsumgebung im Labor in Warnemünde.
Erprobung im Verbundprojekt A-SWARM, vom 21. - 25. März 2022
Im Verbundprojekt: A-SWARM - Autonome elektrische Schifffahrt auf Wasserstraßen in Metropolenregionen; A-SWARM Control fand eine Erprobung autonom operierender Wasserfahrzeuge beim Projektpartner, BEHALA – Berliner Hafen- und Lagerhausgesellschaft mbH, in Berlin statt.
Mit dem Vorhaben soll auf Basis autonomer, koppelbarer und elektrisch betriebener Wasserfahrzeuge ein Beitrag zur modernen Citylogistik geleistet werden. Schwerpunkt ist die Entwicklung und Erprobung autonom operierender Wasserfahrzeuge. Die Machbarkeit eines derartigen Systems soll durch einen Demonstratorbetrieb in einem Reallabor im Bereich des Berliner Westhafens (Spree / Charlottenburger Verbindungskanal / Westhafenkanal / Berlin Spandauer Schifffahrtskanal) nachgewiesen werden.




Abschlusserprobung des Verbundprojektes DP-II in Terneuzen
Im Oktober 2021 fand im Verbundprojekt DP-II: Entwicklung eines automatischen Positioniersystems für Schiffe mit Voith-Schneider-Propellern; Vorhaben DP2go - Adaption, Skalierung und Integration von DP-Regelsystemen die Abschlusserprobung in Terneuzen, dem drittgrößten Hafen der Niederlande, statt.



Acceptance Test und Training des Forschungsgroßgerätes „Verteiltes kooperierendes autonomes Multirobotersystem“
Im Oktober 2021 fanden im Rahmen der Beschaffung des Forschungsgroßgerätes „Verteiltes kooperierendes autonomes Multirobotersystem“ der Acceptance Test und das Training beim Hersteller des Autonomous Underwater Vehicle, dem Unternehmen GRAALtech underwater robotics in Genova, Italy statt.
Im Dezember 2018 erhielt der Lehrstuhl Regelungstechnik die positive Stellungnahme der DFG zur Beschaffung des Forschungsgroßgerätes „Verteiltes kooperierendes autonomes Multirobotersystem“. Nach einer europaweiten Ausschreibung erhielt das Unternehmen GRAALtech underwater robotics den Zuschlag zum Bau des Teilsystems Autonomous Underwater Vehicle.
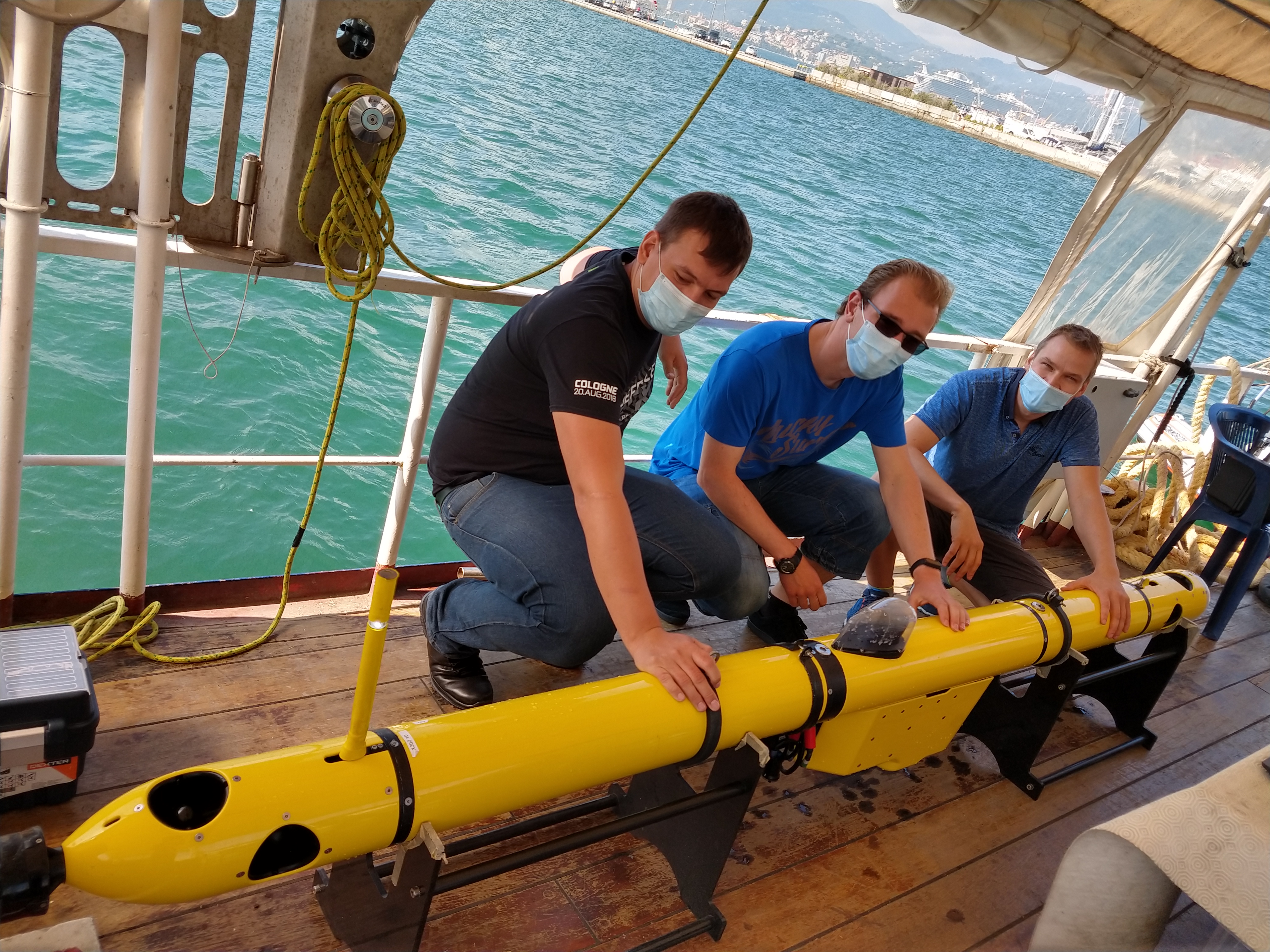
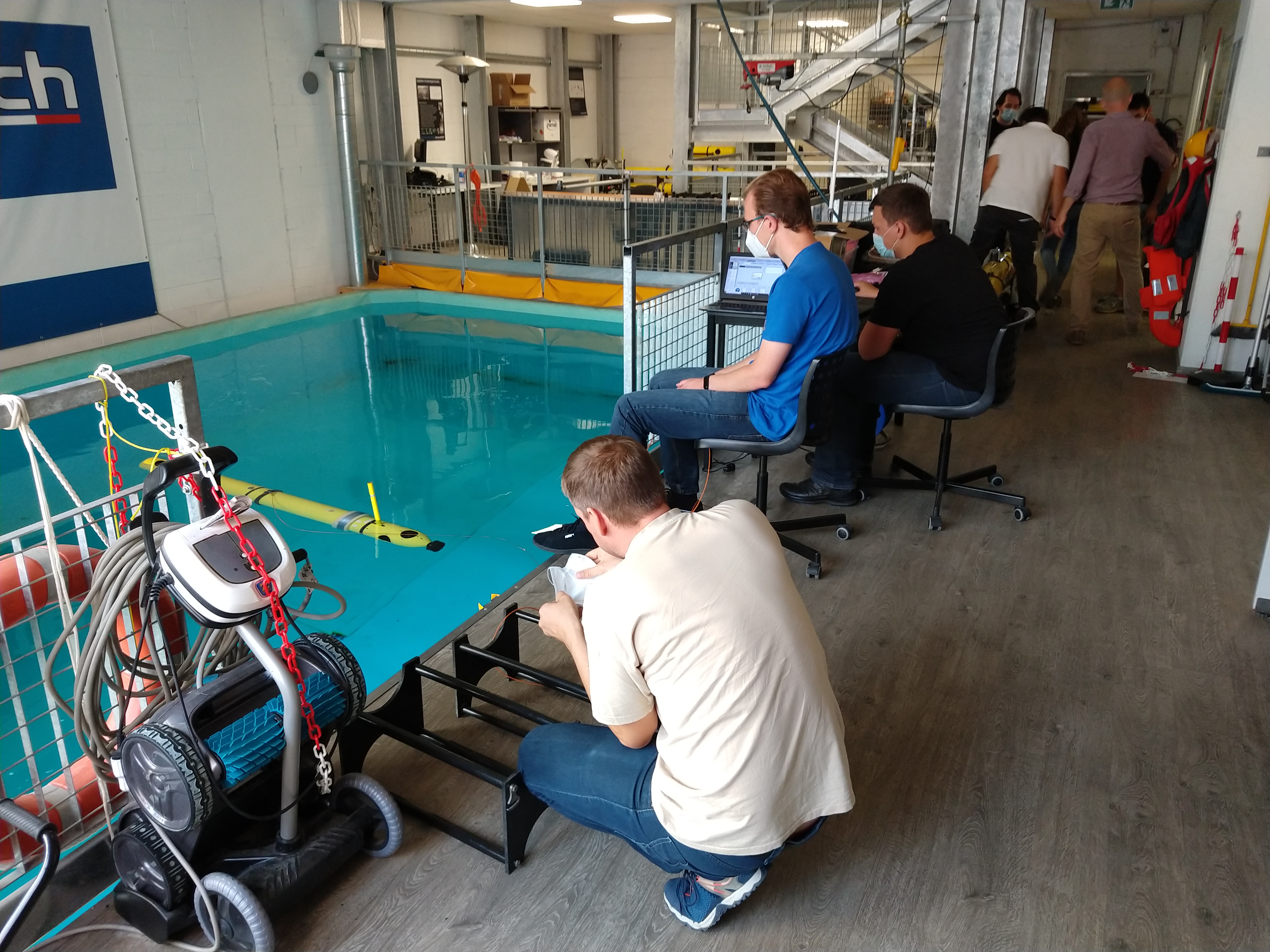

Auftaktveranstaltung des Verbundprojekts DigitalSOW

Am 28.09.2021 fand im Rahmen des Verbundprojekts DigitalSOW, die offizielle Auftaktveranstaltung im Zentrum für Luft und Raumfahrt in Wildau statt.
Herr Alexander Schöley stellte den Beitrag der Universität Rostock zum Verbundprojekt mit einem Vortrag zum Thema Automatisiertes Manövrieren - der Schlüssel zur autonomen Binnenschifffahrt vor.
Pressemitteilung: https://www.digitalsow.de/doc/2021-09_28_PI_offizieller_Projektstart_DigitalSOW_ALB.pdf
Abnahmetest des Forschungsgroßgerätes „Verteiltes kooperierendes autonomes Multirobotersystem“
In der September 2021 fand im Rahmen der Beschaffung des Forschungsgroßgerätes „Verteiltes kooperierendes autonomes Multirobotersystem“ der Abnahmetest und die technische Einweisung beim Hersteller des Remotely Operated Vehicle, dem Unternehmen EvoLogics GmbH in Berlin statt.
Im Dezember 2018 erhielt der Lehrstuhl Regelungstechnik die positive Stellungnahme der DFG zur Beschaffung des Forschungsgroßgerätes „Verteiltes kooperierendes autonomes Multirobotersystem“. Nach einer europaweiten Ausschreibung erhielt das Unternehmen EvoLogics GmbH den Zuschlag zum Bau des Teilsystems Remotely Operated Vehicle.
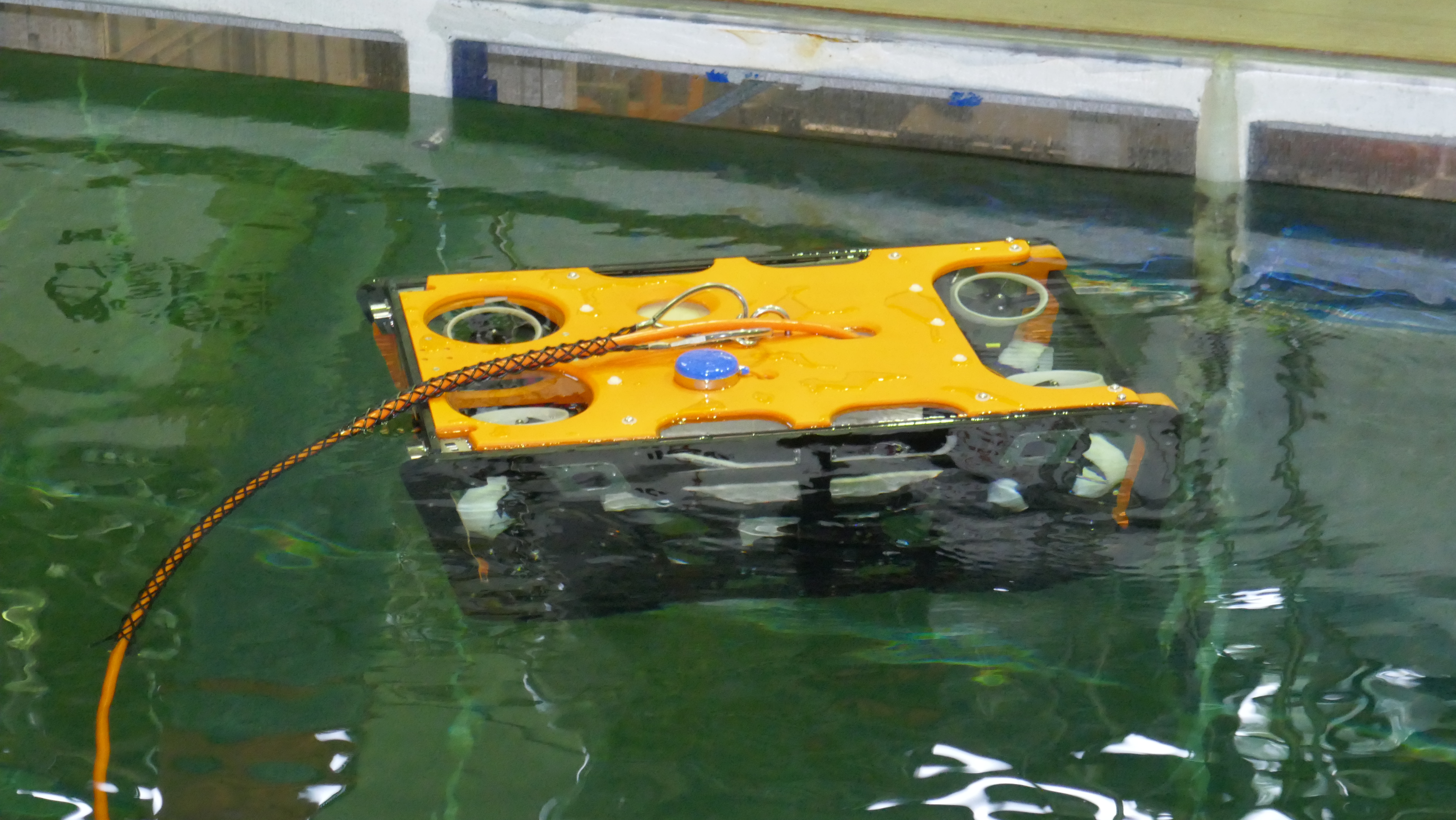
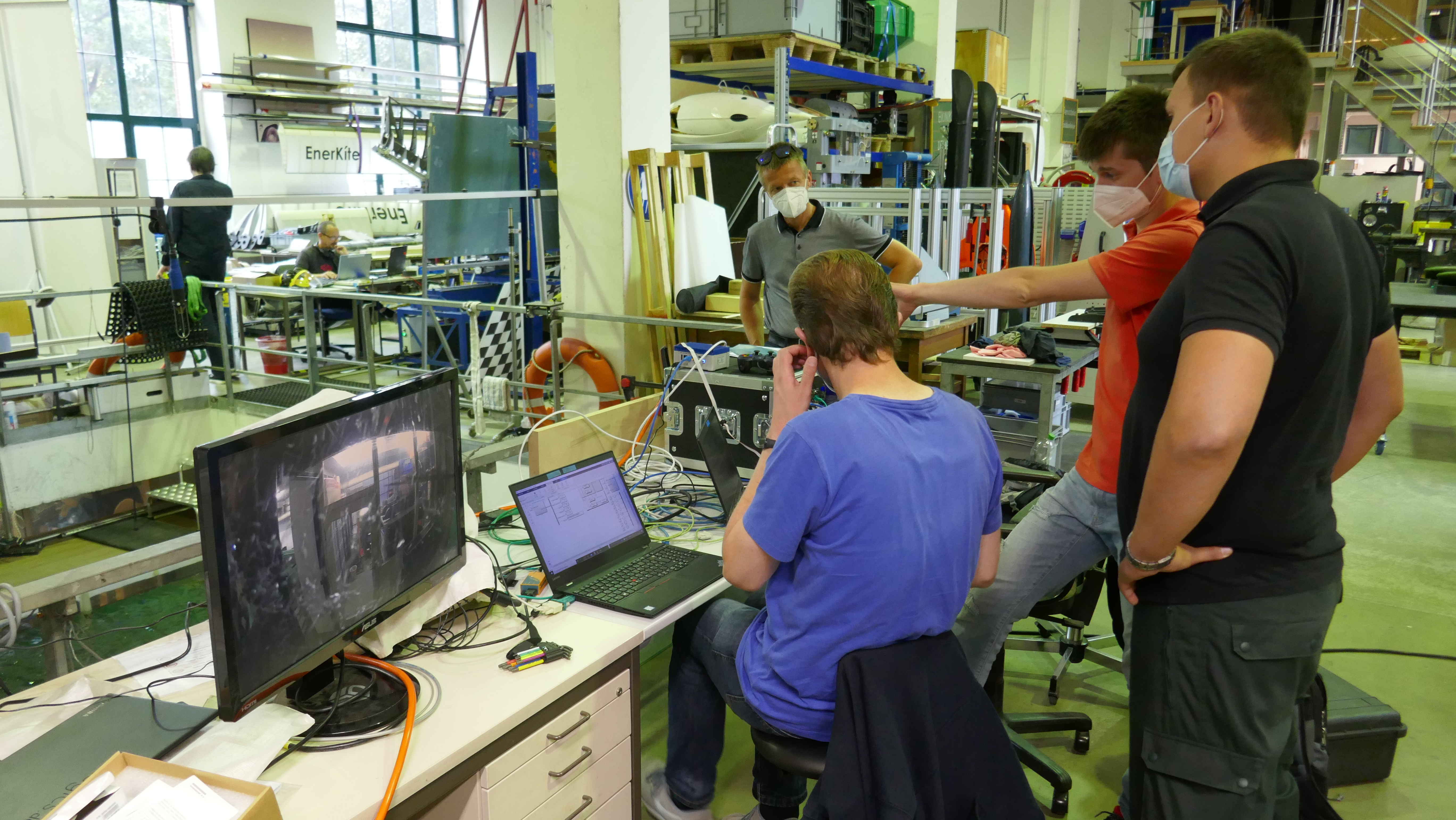
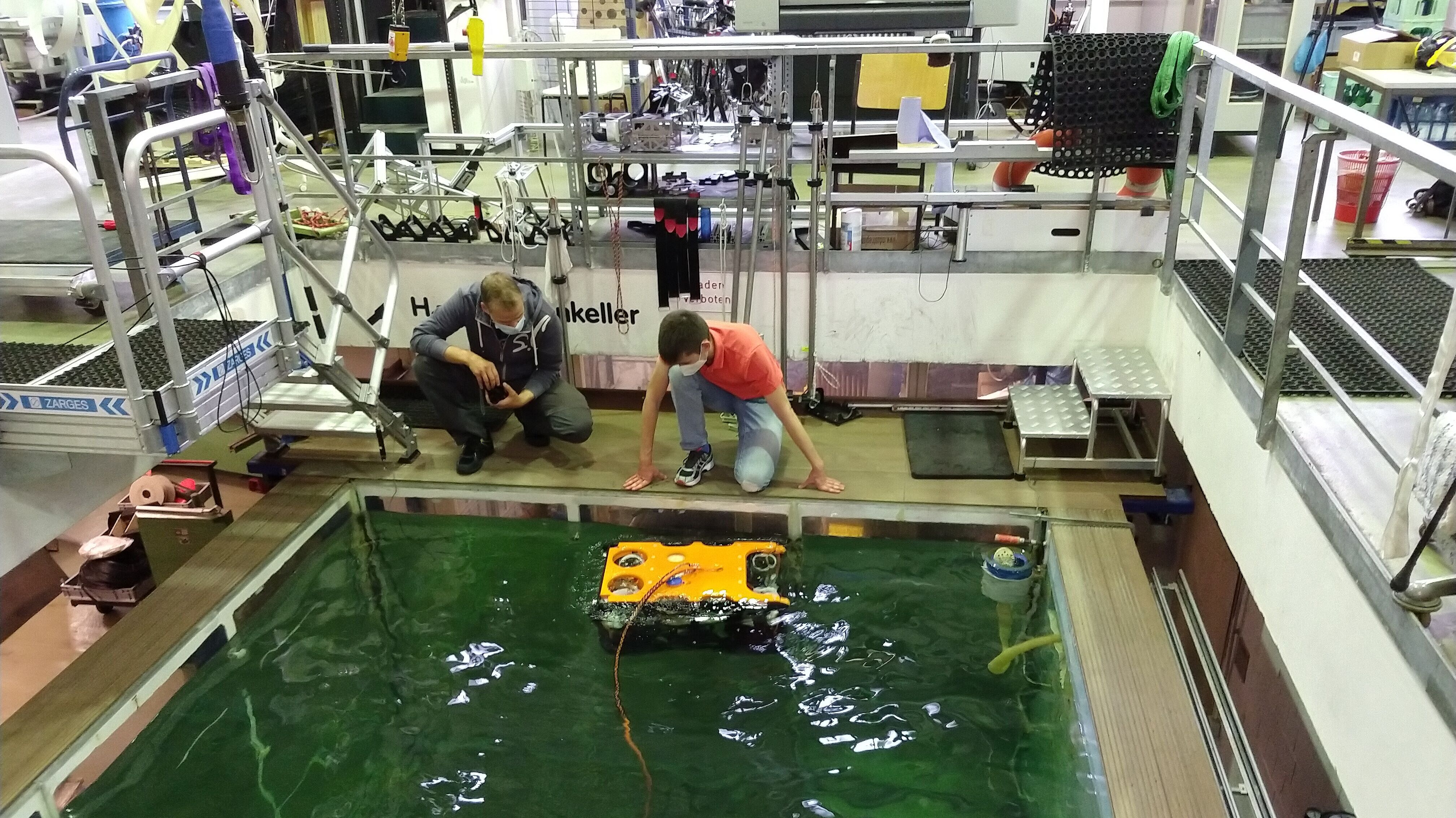
Erfolgreiche virtuelle Abschlusspräsentation des Projekts GALILEOnautic II
Am 14.09.2021 konnten wir mit unserer Abschlussveranstalltung nach jahrelanger wissenschaftlicher Arbeit die Ergebnisse des Projekts GALILEOnautic II vorstellen.
Trotz der Herausforderungen der Corona Pandemie konnten die Projektergebnisse anhand von vier einzigartigen Use Cases bestätigt werden. Dafür wollen wir an dieser Stelle nochmals dem Projektteam danken.
GALILEOnautic 2 ist ein BMWi-gefördertes Forschungsprojekt, das sich mit der gegenwärtig und zukünftig hochrelevanten Automatisierung des Schiffsverkehrs befasst und dazu das Forschungsschiff DENEB automatisiert hat. Vor diesem Hintergrund hat sich ein schlagkräftiges Konsortium gebildet, wobei jeder Partner mit seinen Expertisen zum Projekterfolg beigetragen hat:
- Institut für Regelungstechnik der RWTH Aachen University
- Zentrum für Technomathematik der Universität Bremen
- Institut für Automatisierungstechnik der Universität Rostock
- Institut für Innovative Schiffs-Simulation und Maritime Systeme und Arbeitsgruppe Automatisierungstechnik der Hochschule Wismar
- CGI Deutschland Ltd. & Co.KG
- Raytheon Anschütz GmbH
- TRENZ GmbH
Alle Videos zu der Abschlussveranstaltung inklusive der Use Cases und der Kurzvorstellung der Arbeiten der Projektpartner finden sich hier:
https://galileo-nautic.de/galileonautic2/
Dazu einfach auf den Use Case klicken und weiter unten finden Sie alle Videolinks.

25. International Conference on Methods and Models in Automation and Robotics (MMAR)
Vom 23. bis 26. August 2021 fand die 25. Ausgabe der International Conference on Methods and Models in Automation and Robotics statt. Aufgrund der weiter vorhandenen (Reise-)Beschränkungen ist die Konferenz in einem hybriden Format ausgetragen worden. Herr Schöley vom Lehrstuhl Regelungstechnik konnte als virtueller Teilnehmer mit dem Beitrag „Stability Investigation of PLL-Based Grid Synchronization” Forschungsergebnisse aus dem Projekt Netz-Stabil vorstellen. Wir hoffen, die MMAR im nächsten Jahr wieder vor Ort in Misdroy besuchen zu können!
- Schöley, A., Jeinsch, T.: „Stability Investigation of PLL-Based Grid Synchronization”
Feierliche Übergabe des Zuwendungsbescheides für MUM2 an den Lehrstuhl Regelungstechnik der Universität Rostock
Der Forschungsverbund um thyssenkrupp Marine Systems, EvoLogics GmbH, Universität Rostock, TU Berlin – Fachgebiet Entwurf und Betrieb Maritimer Systeme, Fraunhofer-Institut für Kommunikation, Informationsverarbeitung und Ergonomie FKIE sowie das DLR Institut für den Schutz maritimer Infrastrukturen wollen im Rahmen der Zuwendung bis Anfang 2025 mit dem Modifiable Underwater Mothership (kurz: MUM) den neuen Standard für unbemannte Unterwasserarbeiten setzen.
Ziel des Teilvorhabens MUM2control der Universität Rostock innerhalb des Verbunds ist die Erforschung und Entwicklung von Technologien für die Steuerung und Regelung eines großen, modularen und unbemannten Fahrzeugverbundes zur Durchführung komplexer Nutzlast- und Multifahrzeug-Operationen. Das Teilvorhaben schafft die Grundlage für einen hochautomatisierten bis hin zu einem potentiell autonomen Fahrbetrieb, um innovative Anwendungsszenarien, am Beispiel hochautomatisierter Nutzlastoperationen unter Einsatz heterogener Fahrzeugkonstellationen, zu realisieren. Als übergeordnetes Anwendungsziel soll letztlich die Umsetzung einer Nutzlastoperationen zur Installation und Wartung von Unterwasser-Systemen durch ein mitgeführtes Unterwasserfahrzeug als Manipulator erfolgen. In diesem Szenario wird mit einem Remotely Operated Vehicle (ROV) vom MUM Trägerfahrzeug aus eine autonome Greifoperation durchgeführt.



Erste Ostseetour mit dem Experimentalkatamaran "Bernhard Lampe" am 20. Mai 2021
Am 20.05.2021 fand eine erste längere Fahrt auf die Ostsee in ein Seegebiet vor Nienhagen mit dem neuen Experimentalkatamaran "Bernhard Lampe" statt. Mit an Bord waren neben Mitarbeitern des Lehrstuhls Regelungstechnik Kollegen der Meeresbiologie der Universität Rostock und Taucher des IOW.
Ziele waren einerseits die Erprobung von Techniken zur Probennahme in 19m Wassertiefe und zum anderen die Erpobung der Funktionalitäten zum virtuellen Ankern und des Autopilotsystems des Katamarans.



Turbulenzmessung in der Kattegat Front mit dem USV MESSIN, vom 18.-25.Mai 2021
Im Rahmen der Kooperation zwischen dem IOW und der Universität Rostock wird der hochautomatisierte Geräteträger MESSIN zusammen mit der EMB in einem verteilten Mess- und Sensorsetup zur Turbulenzmessung in der Kattegat Front betrieben. Hierbei kommen neuste Entwicklungen zur Pfad– und Bahnplanung sowie Zustandsschätzung, mit dem Ziel robust reproduzierbare Trajektorien zur kooperativen Messdatenaufnahme zu realisieren, zum Einsatz. Ein weiterer Untersuchungsschwerpunkt des Lehrstuhls Regelungstechnik während der Forschungsfahrt ist die experimentelle Erprobung neuster modellbasierter Regelungsansätze für autonome Oberflächenfahrzeuge. Hierbei werden erstmals nichtlineare und verteilt-parametrische Systemansätze in der maritimen Regelungstechnik zur Anwendung gebracht.


12. Nationale Maritime Konferenz, vom 10.-11.Mai 2021
Das BMWi-Förderprojekt MUM (Large Modifiable Underwater Mothership), https://mum-project.com/, mit seinen Partnern thyssenkrupp Marine Systems GmbH, ATLAS Elektronik GmbH, EvoLogics GmbH, Technische Universität Berlin und Universität Rostock präsentierten sich am Eröffnungstag der 12. Nationalen Maritimen Konferenz Rostock.
Im Rahmen einer Live-Schalte wurde das Forschungsprojekt MUM von Dr. Rolf Wirtz, CEO und Vorsitzender der Geschäftsführung der thyssenkrupp Marine Systems GmbH, und Prof. Torsten Jeinsch vom Institut für Automatisierungstechnik, der Fakultät für Informatik und Elektrotechnik der Universität Rostock, im Beisein des Koordinators der Bundesregierung für die maritime Wirtschaft, Norbert Brackmann, vorgestellt.
Das Verbundvorhaben MUM aus Industrie und Wissenschaft entwickelte ein modulares Baukastensystem für eine neue, innovative Fahrzeugklasse zur Erkundung und ressourcenschonenden Nutzung der Weltmeere. Dabei bricht MUM mit konventionellen Strategien. In einer einzigartigen Modulbauweise können Basismodule zusammen mit speziellen Missionsmodulen zu großen Systemen zusammengestellt werden. Das angewendete Baukastenprinzip erlaubt so eine missionsspezifische Zusammenstellung.
Die Universität Rostock entwickelte dafür neue Methoden zur Modellgenerierung und zur Regelung flexibel strukturierbarer Unterwasserfahrzeuge. So wurde der Transformationsgedanke auch in die automatische Steuerung und Regelung des MUM implementiert. Außerdem wurden Herausforderungen zur Eigen- und Fremdsicherheit großer autonomer Fahrzeuge im Rahmen einer fehlertoleranten Missionsführung untersucht und erfolgreich validiert.

Vorbereitungen im Rahmen der IOW Forschungsfahrt EMB265
Vom 18.05.2021 bis 25.05.2021, findet unter der Führung des Leibniz-Instituts für Ostseeforschung Warnemünde - IOW, eine Forschungsfahrt mit dem Forschungsschiff Elisabeth Mann Borgese zur Turbulenzmessung in der Kattegat Front statt. In Vorbereitung wird der hochautomatisierte Geräteträger Messin planmäßig hergerichtet.



Promotionsverteidigung per Videokonferenz
Die veränderten Umstände für Forschung und Lehre Anfang dieses Jahres bewegen Studierende und Lehrende der Universität Rostock zu neuen Arbeits-, Lehr- und Prüfmethoden. Davon bleibt auch die Promotionsverteidigung nicht ausgenommen.
Am 29. April 2021 verteidigte Dr. Mathias Scheel seine Dissertationsschrift zum Thema „Ein Beitrag zur patienten-individuellen Regelung in Atemtherapiegeräten zur Behandlung des obstruktiven Schlafapnoesyndroms“. Die Promotionskommission sowie Gäste loggten sich aus dem jeweiligen Homeoffice in Warnemünde, Rostock, Wismar, Lübeck und Berlin in die Live-Webkonferenz ein.
Erstgutachter war Prof. Torsten Jeinsch von der Universität Rostock, Zweitgutachter Prof. Philipp Rostalski von der Universität zu Lübeck und Drittgutachter Prof. Olaf Simanski von der Hochschule Wismar.
Glückwunsch!
Ersterprobung im Verbundprojekt A-SWARM, vom 22. - 26.März 2021
Im Verbundprojekt: A-SWARM - Autonome elektrische Schifffahrt auf Wasserstrassen in Metropolenregionen; A-SWARM Control findet aktuell die Ersterprobung beim Projektkoordinator, SVA - Schiffbau-Versuchsanstalt Potsdam GmbH, in Potsdam statt.
Mit dem Vorhaben soll auf Basis autonomer, koppelbarer und elektrisch betriebener Wasserfahrzeuge ein Beitrag zur modernen Citylogistik geleistet werden. Schwerpunkt ist die Entwicklung und Erprobung autonom, d.h. bis auf GPS ohne wesentliche landseitige Unterstützung, operierender Wasserfahrzeuge. Die Machbarkeit eines derartigen Systems soll durch einen Demonstratorbetrieb in einem Reallabor nachgewiesen werden.




GALILEOnautic DENEB-Erprobung, vom 15. - 22.März 2021
Die erste Erprobung mit dem deutschen Versuchsträger DENEB für autonome Systeme in der Schifffahrt ist heute im Rahmen des Projektes GALILEOnautic II gestartet. Das Institut für Automatisierungstechnik ist dabei und bereitet die Funktionen zum automatisierten Fahren vor.






13th IFAC CAMS, vom 15. - 17.September 2021

Liebe Freunde der maritimen Regelungstechnik,
jedes Jahr findet die internationale Konferenz “IFAC Conference on Control Applications in Marine Systems, Robotics, and Vehicles (IFAC CAMS)" statt.
Aufgrund der weltweiten Situation wird die diesjährige 13th IFAC CAMS vom 15. bis 17. September 2021 virtuell ausgetragen und gemeinsam vom Deutschen Institut für Informationstechnik / DLR, der Universität Rostock und der International Federation of Automation Control (IFAC) Automation Control (IFAC) organisiert. Ziel ist es, führende Wissenschaftler, Forscher, Studenten und Industrievertreter zu relevanten Forschungsthemen zusammenzubringen, die direkt oder indirekt das breite Feld der maritimen Autonomie betreffen. Auf diese Weise sollen der Austausch von Ideen und die gegenseitige Zusammenarbeit gefördert werden.
Wir laden Euch hiermit ein, Eure Forschungsaktivitäten als Beitrag für die CAMS 2021 einzureichen. Die Themen könnt ihr dem angehängten bzw. unter diesem Link verfügbaren PDF entnehmen: https://cams-2021.com/paper-submission/call-for-papers/
Schaut auch einfach auf die Webseite: www.cams-2021.com für weitere Informationen.
Mitwirkung am interdisziplinären Vorlesungsmodul Unterwassertechnologie

Auf Grundlage der jahrelangen erfolgreichen Zusammenarbeit des Lehrstuhls Regelungstechnik mit den Kollegen vom Fachgebiet Entwurf und Betrieb maritimer Systeme der Technischen Universität Berlin (http://www.marsys.tu-berlin.de/) wurde geplant einen interdisziplinären Studiengang zwischen den Universitäten zu etablieren.
Mit dem Modul Unterwassertechnologie haben die Berliner Kollegen einen ersten Schritt gemacht. In dem Modul werden die Grundlagen des Entwurfes und der Entwicklung für unbemannte Unterwasserfahrzeuge erarbeitet. In diesem Zusammenhang freuen wir uns sehr uns mit zwei Vorlesungen zum Thema Regelung und automatische Fahrzeugführung von Unterwasserfahrzeugen in die interdisziplinäre Veranstaltung einbringen zu dürfen.
Tauchgang zu einem Schiffswrack vor Warnemünde
In Zusammenarbeit mit dem Forschungstaucherteam um Martin Siegel (www.tauchersiegel.net) fand am 18.11.2020 im Rahmen der Abschlusserprobung des MiRo-Base Projekts ein Tauchgang mit dem im Projekt entwickelten ROV zu einem Wrack vor Warnemünde statt. Bei dem Wrack handelt es sich um einen Marineschlepper aus dem zweiten Weltkrieg, welches trotz der vielbefahrenen Lage erst 2009 bei Vermessungsarbeiten gefunden wurde.
Bei dem Tauchgang konnten die Funktionalität der benutzerunterstützenden Regelungsalgorithmen zusammen mit der der Arbeiten der Projektpartner erfolgreich belegt werden: Das im Rahmen des Projekts als Testträger entwickelte ROV war gut zur Erkundung des Wracks geeignet und ließ sich dank der aktiven Regelung zuverlässig steuern.
Aufgrund der Corona-Pandemie konnten die Mitarbeiter des Lehrstuhls für Regelungstechnik bei der Erprobung nur von Mitarbeitern des Projektpartners Fraunhofer IGD unterstützt werden. Besonderer Dank gilt an dieser Stelle Peter Menzel, dem Skipper des Erprobungsbootes, für die gute und entspannte Zusammenarbeit bei der Erprobung.

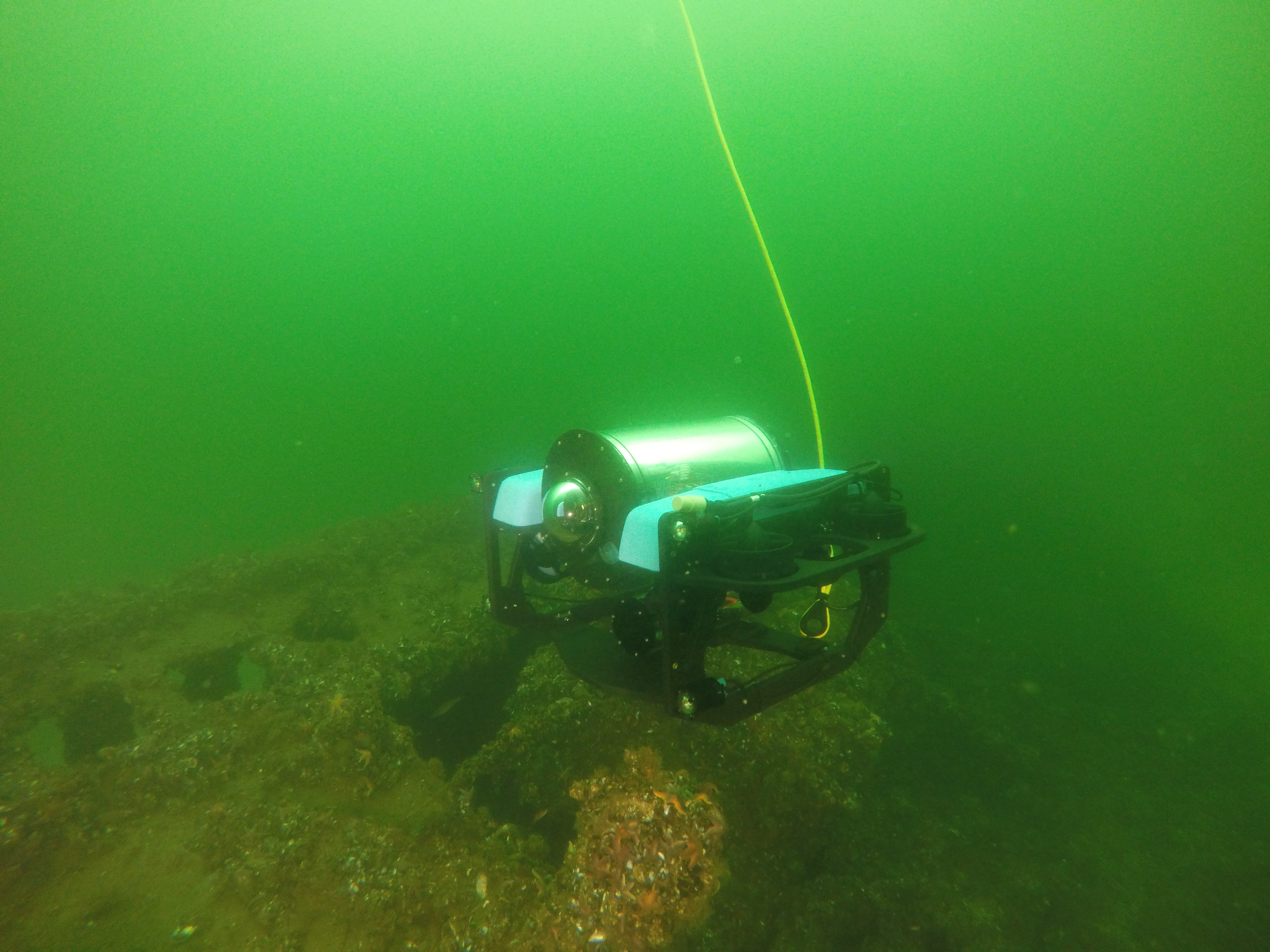

New highly automated experimental catamaran at the University of Rostock

The Institute of Automation at the University of Rostock now owns a highly maneuverable experimental catamaran, which is the first element of a proposed large-scale equipment called "Distributed Cooperating Autonomous Multirobot System" (VKAM). In mid-October 2020, the research catamaran as the future autonomous system carrier of the VKAM system was handed over to the Chair of Control Engineering by the Nordland Hansa GmbH company from Rostock.
The German Research Foundation has recommended the acquisition of a VKAM planned by the Institute of Automation at the Faculty of Computer Science and Electrical Engineering. After the successful scientific and technical evaluation of the proposal , the Ministry of Education, Science and Culture of the State of Mecklenburg-Vorpommern provided a financial support in amount of almost 900,000 euros to the scientists from the Chair of Control Engineering at the University of Rostock. With this support, the Chair of Control Engineering is pursuing the vision of cyber-physical multi-robot systems with autonomous, cooperating, distributed, heterogeneous individual subsystems consisting of the Autonomous Underwater Vehicle (AUV), Remotely Operated Vehicle (ROV), Autonomous Surface Vehicles (ASV) and Unmanned Aerial Vehicle (UAV) as the main components.
The research catamaran is the only research vessel in Mecklenburg-Vorpommern which can act as an autonomous, highly maneuverable surface vehicle and at the same time serves as an interface within a cooperating multi-robot network with other autonomous agents. With 2 x 140 HP jet outboard engines, automated features such as winch, crane and bow flap, open interfaces to actuators, navigation and environment sensors, it forms a central component of the future multi-robot system.
Already during the application phase, the researches in the Chair of Control Engineering had intensive discussion and exchanges with numerous regional and national scientists. The Chair of Control Engineering would like to thank the partners for their support before and during the application and conception phases: Department of Maritime Systems of the Interdisciplinary Faculty, the Chair of Marine Technology at the University of Rostock, the Fraunhofer Institute for Computer Graphics Research - Department of Maritime Graphics, the Leibniz Institute for Baltic Sea Research Warnemünde, the Technical University of Berlin - Department of Design and Operation of Maritime Systems, the Laboratory for Underwater Systems and Technologies at the University of Zagreb, the Norwegian University of Science and Technology - Department of Marine Technology and the University of Limerick - Mobile & Marine Robotics Research Centre.
In memory of the former chair holder, the experimental catamaran will be named "Bernhard Lampe". Due to current restrictions as a result of the Covid 19 pandemic, the naming ceremony of the vessel will be postponed until 2021.
Erprobungswochen im Projekt GALILEOnautic 2
Im Rahmen des Projektes GALILEOnautic 2 wurden nach langer Pause durch die coronabedingten Reisebeschränkungen im August und September 2020 wieder Erprobungen auf dem Breitling in Rostock mit dem Versuchsträger MESSIN durchgeführt. Die Projektpartner von der RWTH Aachen, der Universität Bremen und der Hochschule Wismar konnten dazu anreisen. Insbesondere wurde die erweiterte Sensorik zur Nahfelderkennung mittels Radar, Lidar und UWB in Kombination mit der klassischen Navigationssensorik getestet. Unter Anwendung von AIS-Nachrichten anderer Wasserfahrzeuge konnten neuen Algorithmen zur Kollisionsvermeidung erprobt werden. Weitere Versuchsreihen galten der Fehleridentifikation in Sensorik und Aktorik, um die Implementierung fehlertoleranter Methoden in die automatische Regelung von kooperierenden Wasserfahrzeugen vorzubereiten.

21. IFAC Weltkongress
Vom 11. bis 17. Juli fand der IFAC World Congress in Berlin statt. Bei dieser nur alle drei Jahre stattfinden Konferenz treffen sich tausende Wissenschaftler der Automatisierungs- und Regelungstechnik und diskutieren in Vorträgen und Workshops die neusten Forschungen. Aufgrund der aktuellen Pandemie fand der 21. Weltkongress erstmalig rein virtuell statt.
Der Lehrstuhl Regelungstechnik hat drei Beiträge im Rahmen des Weltkongresses veröffentlicht:
- Rybinskii, V., Rosenwasser, E. N., Ladisch, J., Drewelow, W., Jeinsch, T.: “Guaranteeing the Accuracy of Digital Control of a Linear Periodic Object within the Set of Stabilizing Regulators”
- Schöley, A., Gierschner, M., Jeinsch, T.: „Non-linear Control of Grid-Side Inverters”
- Kurowski, M., Schubert, A., Jeinsch, T.: “Automated Maneuvering in Confined Waters using Parameter Space Model and Model-based Control"



18. Wind Integration Workshop in Dublin

Vom 16. bis 18. Oktober 2019 fand in Dublin der 18. Internationale Windintegration Workshop statt. In diesem Format treffen sich jährlich Forscher, Netzbetreiber und Hersteller um Trends zu diskutieren, Neuentwicklungen zu präsentieren und Erfahrungen auszutauschen. Die zentrale gemeinsame Frage ist, wie in Zukunft das Energienetz mit ausschließlich regenerativen Erzeugern stabil und sicher betreiben wird und welchen Beitrag dazu Windenergieanlagen leisten können und müssen.
Vom Lehrstuhl Regelungstechnik hat Alexander Schöley am Workshop teilgenommen und präsentierte den Beitrag „Grid-Current Observer for Wind Energy Systems with LCL-Filter“, der im Rahmen des Projektes „Netz-Stabil“ zusammen mit Magdalena Gierschner vom Lehrstuhl für Leistungselektronik und Elektrische Antriebe der Universität Rostock entstand.
Breaking the Surface 2019 in Kroatien
Wie bereits in den Vorjahren nahm auch in diesem Jahr wieder ein Kontingent aus Rostock an dem „Breaking the Surface“ Workshop in Biograd na Moru, Kroatien teil.
Der bereits zum elften Mal stattfindende Workshop, welcher die Themengebiete maritime Robotik, Meeresbiologie, Meeresarchäologie, Meeresgeologie und die maritime Sicherheit vereint, fand dieses Jahr vom 29. September bis zum 06. Oktober statt.
Unser Institut stellte im Rahmen des MiroBase Projektes ein Plakat aus und nutzte die Gelegenheit sich bei den Vorträgen und praktischen Vorführungen der anderen Teilnehmer unter anderem Informationen für die geplante Großgeräteanschaffung des Instituts zu beschaffen. Das IAT wurde dieses Jahr durch Torsten Jeinsch, Wolfgang Drewelow, Sven Lack, Martin Kurowski und Jonas Pabst vertreten.




CAMS 2019 - Winner of the Best Paper Award
Wir freuen uns, dass unser Paper
"Automated Survey in Very Shallow Water using an Unmanned Surface Vehicle"
(Martin Kurowski, Janis Thal, Robert Damerius, Holger Korte and Torsten Jeinsch)
Gewinner des "Best Paper Award" bei der CAMS 2019 in Korea wurde.
CAMS 2019 - Control Applications in Marine Systems in Daejeon (Korea)
Auch im Jahr 2019 nahmen wieder Kollegen an der CAMS-Konferenz statt. Die Konferenz bietet jährlich die Chance aktuelle Forschungsschwerpunkte im Bereich der maritimen cyberphysikalischen Systeme vorzustellen und zu diskutieren.
Zwei Kollegen erhielten Gelegenheit ihre Forschungsergebnisse mit Vorträgen zu präsentieren. Herr Martin Kurowski erhielt für seine Arbeit zum Thema „Automated Survey in Very Shallow Water using an Unmanned Surface Vehicle“ sogar den Best Paper Award.
Die Konferenz fand am Korea Advanced Institute of Science and Technology (KAIST) statt, einer international hoch angesehen Universität mit ca. 10000 Studenten. Dort wurde neben der Möglichkeit die lokale Küche kennenzulernen auch eine Führung durch die fortschrittlichen Forschungsanlagen angeboten.
Das IAT wurde durch Vorträge von Sven Lack und Martin Kurowski vertreten, für den stellvertretend Jonas Pabst zur Konferenz anreiste.

Gäste von der Technical University of Varna aus Bulgarien im Rahmen des ERASMUS+ Mobility Agreement an der Universität Rostock zu Gast
Während Ihres mehrtägigen Aufenthaltes an der Universität Rostock präsentierten Reneta Parvanova und Ivan Grigorov von der Technical University of Varna vom 02.-06. September 2019 im Rahmen des regelungstechnischen Kolloquiums aktuelle Projekte und Forschungsergebnisse zu den Themen „Wavelet based system identification“ und „Recursive estimation of parameters in adaptive control systems”.



Erprobung GALILEOnautic II
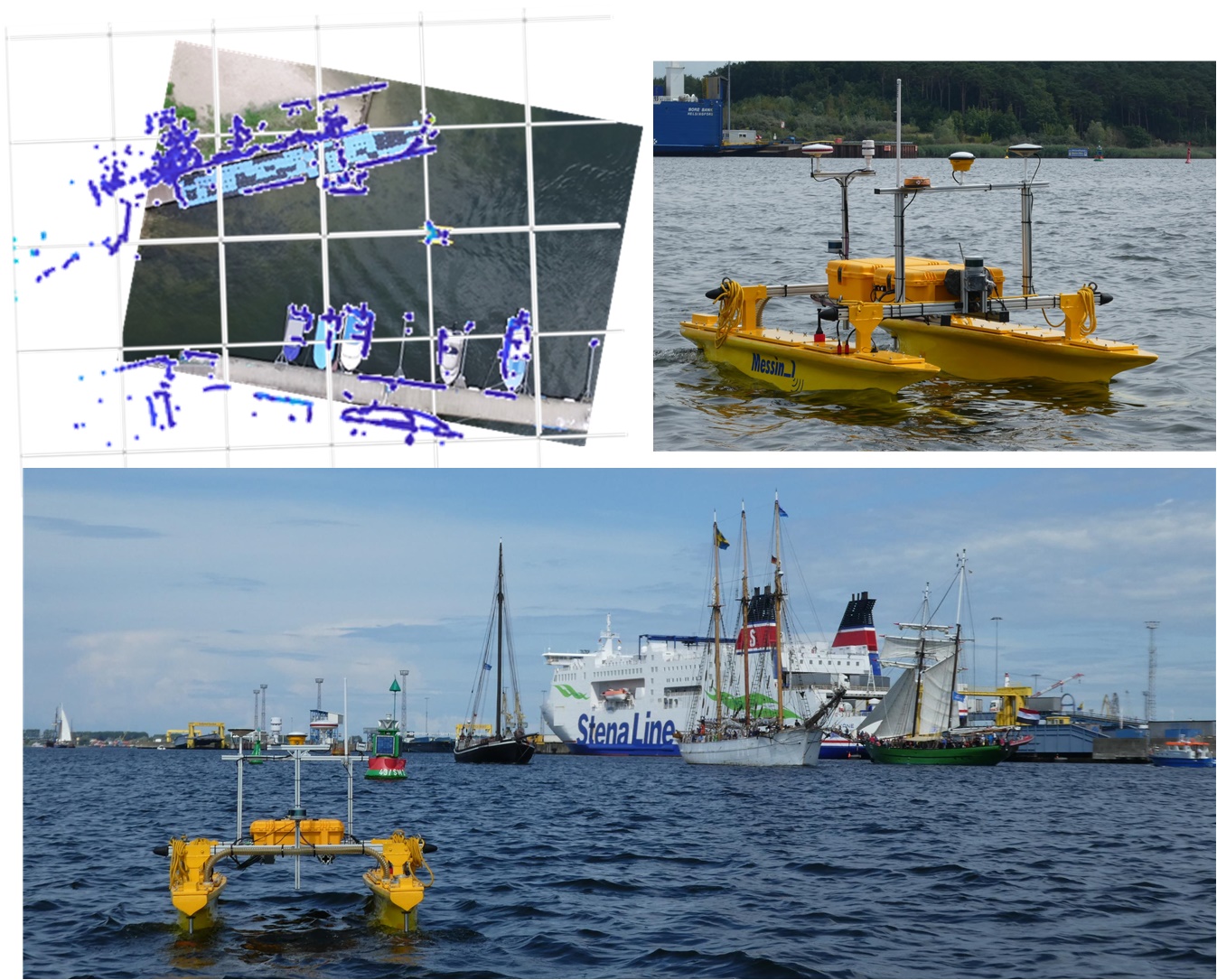
Im Rahmen des Projektes GALILEOnautic II erfolgte im Zeitraum vom 29.07.-09.08. eine Erprobung im Rostocker Hafen.
Im Fokus stand der Test von Nahfeldsensorsystemen Lidar/Radar und erweiterte Funktionalitäten zur Navigation von Wasserfahrzeugen im Hinblick auf die Einsatzmöglichkeit innerhalb einer potentiellen, autonomen Schifffahrt.
Treffenderweise fand während der Erprobung die Hanse Sail 2019 stand. Es gab also viele „Ziele“ zu beobachten.
Buch „Computer-Controlled Systems with Delay – A Transfer Function Approach“
Seit dem 22. Mai 2019 ist das neue Buch „Computer-Controlled Systems with Delay – A Transfer Funktion Approach“ von Efim N. Rosenwasser, Bernhard P. Lampe und Torsten Jeinsch im Springerverlag erschienen.
Computer-Controlled Systems with Delay is a systematic study of the problems of analysis and synthesis for multidimensional sampled-data (SD) systems with delay. It is based on the frequency polynomial method, in which the concept of a parametric transfer matrix (PTM) plays a key role. Until now, no alternative general methods have been available to solve the above problems.
The text is divided into three parts:
- background information from the theory of polynomial and rational matrices, helps the reader to acquire the basic understanding necessary to use the main content of the book without addressing additional sources;
- methods for the mathematical description of multidimensional SD systems with delay, based on the concept of the PTM; and
- optimization methods for multidimensional SD systems with delay, including H2 and L2 optimization as well as H2 optimization for colored input signals.
International Interdisciplinary PhD Workshop 2019
An der Hochschule Wismar fand vom 15.-17. Mai 2019 der International Interdisciplinary PhD Workshop 2019 (I²PhDW 2019) statt. Bei dem seit 2009 stattfindenden internationalen Workshop treffen sich Promotionsstudenten und Post-Doktoranden zum gegenseitigen Vorstellen ihrer Projekte und zum Erfahrungsaustausch. Beim gemeinsamen Diskutieren der Vorträge und Poster entstehen so neue Ansätze und Ideen.
Vom Lehrstuhl Regelungstechnik nahmen zwei Mitarbeiter am Workshop teil und stellten Forschungsergebnisse dem internationalen Publikum vor. Robert Damerius präsentierte in seinem Vortrag „A Generic Inertial Navigation System“ ein modulares, generisches Konzept für ein Navigationssystem, welches fahrzeugunabhängig Sensordaten fusioniert. Aktuelle Ergebnisse aus dem Verbundprojekt „Netz-Stabil“ veröffentlichte Alexander Schöley in dem Beitrag „Frequency Adaptive State Observer for Grid Current Estimation of Wind Energy Systems“.
Bilder: Hochschule Wismar



Fachlicher Austausch mit dem Leibniz-Institut für Ostseeforschung Warnemünde (IOW
Am Dienstag den 02.04.2019 trafen sich Kollegen des Leibniz-Instituts für Ostseeforschung Warnemünde und Kollegen des Lehrstuhls für Regelungstechnik zum fachlichen Austausch im Anwendungszentrum für Regelungstechnik. An den konkreten Geräten des Lehrstuhls für Regelungstechnik wurde zusammen über die zukünftigen Herausforderungen in der Meeresforschung philosophiert und diskutiert.
Wir bedanken uns für den aufschlussreichen Austausch und freuen uns auf eine zukünftig interdisziplinäre Zusammenarbeit mit dem IOW.


Erprobung der Regelungsalgorithmen im AFluCoMIS-Projekt
Am 22.03.2019 fand die Erprobung der im AFluCoMIS-Projekt enwickelten Regelungsalgorithmen beim industriellen Partner, der World of Medicine GmbH, in Berlin statt. Im Fokus stand dabei die Druckregelung in der minimalinvasiven Chirurgie. Diese unterstützt den Operateur während eines minimalinvasiven Eingriffes durch eine geeignete Aufblähung und Spülung des Operationsgebietes. Getestet wurde das System anhand eine Vielzahl von realitätsnaher Aufgabenstellungen, welche in enger Zusammenarbeit mit dem klinischen Partner, dem Krankenhaus Märkisch Oderland, erarbeitet wurden. Für die Versuche konnte auf die umfangreiche Testumgebung der World of Medicine GmbH im hauseigenen „Wetlab“ zurückgegriffen werden. Die aus den Versuchen gewonnenen Erkenntnisse werden in die weitere Geräteentwicklung für die minimalinvasive Chirurgie eingehen und damit auch zu einer Verbesserung der Patiententherapie führen.
Das Projekt „AFluCoMIS - Advanced Fluid Control for Minimally Invasive Surgery“ wird im Rahmen der Bekanntmachung „Medizintechnische Lösungen für eine digitale Gesundheitsversorgung“ vom Bundesministerium für Bildung und Forschung gefördert.
Besuch des MSCW in Warnemünde mit Studenten der Lehrveranstaltung Maritime Systeme
Am 01.02.2019 hatten die Studenten im Rahmen der Lehrveranstaltung Maritime Systeme wieder die Chance sich als "Kapitän" auf großer Fahrt zu beweisen.
Dazu waren wir im Schiffsführungssimulator des MSCW in Warnemünde, wo jeder das Steuer eines 200m Frachters übernehmen konnte. Nebenbei wurden natürlich die in der Schifffahrt eingesetzten Kurs- und Bahnregelungen für Schiffe begutachtet und auch bei Seegang erprobt.
Wir danken nochmals dem Team des MSCW allen voran Cathleen für ihre seemännischen Erläuterungen und die tolle Führung durch den Simulator.


4. Symposium zu Trends in der Minimal Invasiven Medizin in Berlin
Am 18. Oktober 2018 fand in Berlin das 4. Symposium zu Trends in der Minimal Invasiven Medizin statt. Die Organisatoren von der Technische Universität Berlin mit dem Fachgebiet Medizintechnik, W.O.M. World of Medicine GmbH und Berlin Partner für Wirtschaft und Technologie GmbH setzten in diesem Jahr den Fokus auf das Thema Digitalisierung im OP. Vier Vorträge und eine anschließende Podiumsdiskussion lenkte den Blick auf die Auswirkungen der Digitalisierung im OP und in der Minimal Invasiven Medizin.
Das Institut für Automatisierungstechnik stellte im Rahmen dieser Veranstaltung aktuelle Forschungsergebnisse des laufenden BMBF Verbundprojektes AFluCoMIS – Advanced Fluid Control for Minimal Invasive Surgery vor.


17. Wind Integration Workshop in Stockholm

Der 17. Wind Integration Workshop fand als Teil der Grid Integration Week vom 17.-19. Oktober 2018 statt. Wissenschaftler und Vertreter der Energieindustrie aus aller Welt trafen sich in Stockholm um sich über aktuelle Forschungen und Entwicklungen auszutauschen. Fragestellungen, die während des Workshops diskutiert wurden, drehten sich um die sichere Integration von Windenergieanlagen in das bestehende Energienetz und den parallelen Betrieb von immer weniger konventionellen Kraftwerken und immer mehr regenerativen Erzeugungsanlagen.
Der Lehrstuhl Regelungstechnik wurde von Alexander Schöley vertreten, der Forschungsergebnisse aus dem EU-Verbundprojekt Netz-Stabil mit dem Beitrag „Lyapunov-Based Control for Grid Side Inverters of Wind Turbine Systems“ vorstellte. Diese Veröffentlichung entstand in Zusammenarbeit mit Magdalena Gierschner vom Institut für Leistungselektronik und Elektrische Antriebe der Universität Rostock.
Breaking the Surface 2018 in Kroatien
Vom 30.09. bis zum 06.10.2018 fand zum zehnten Mal der internationale Workshop „Breaking the Surface“ in Biograd na Moru, Kroatien, statt.
Diese Veranstaltung dient Experten und Studenten aus den Fachgebieten der maritimen Robotik, der Meeresbiologie, Meeresarchäologie, Meeresgeologie und der maritimen Sicherheit als Plattform zum interdisziplinären Austausch von Ideen und Expertisen, sowie zur Vorführung und Erprobung von neuen Technologien im Bereich der Unterwasserrobotik und -kommunikation.
Unser Institut war mit mehreren Plakaten zu laufenden Forschungsprojekten und einem Vortrag beteiligt, in dem die Entwicklung von Schlüsseltechnologien für komplexe autonome Unterwasseroperationen anhand der Projekte SMIS (Subsea Monitoring via Intelligent Swarms) und MUM (Large Modifiable Underwater Mothership) vorgestellt wurden. Im Anschluss an den Vortrag bot das Miniaturmodell des MUM-AUVs den Workshopteilnehmern die Gelegenheit, sich mit dem innovativen MUM-Konzept auseinanderzusetzen und über die vorgestellten Technologien zu diskutieren. Vertreten wurde das IAT durch Professor Torsten Jeinsch, Martin Kurowski, Erik Rentzow, Sven Lack und Thilo Müller.






Cams 2018 - Control Applications in Marine Systems in Opatija (Kroatien)
Die CAMS 2018 bietet der Industrie, den Universitäten und Forschungsinstituten eine ausgezeichnete Gelegenheit, zukünftige Trends im Bereich der marinen cyberphysikalischen Systeme zu erforschen und neue Verbindungen zur Herausarbeitung neuer innovativer Ideen zu erkunden
Jährlich treffen sich bei dieser Konferenz die Spezialisten für maritime Regelungstechnik um sich über ihre Fortschritte auszutauschen.
Wir waren im Rahmen des Projektes DP2 (Dynamische Positionierung von Schiffen) mit einem Beitrag zur Wellenfilterung bei der "CAMS 2018" vertreten.
Der wunderschöne Tagungsort Opatija an der Adria bot beste Voraussetzungen um bei toller Atmosphäre unsere Kontakte aufzufrischen und möglich neue Partner kennen zu lernen.


Abschlusspräsentation des BMWi-Förderprojektes GALILEOnautic
Am 28. Juni 2018 fand auf dem Traditionsschiff Typ Frieden des Schiffbau- und Schifffahrtsmuseums Rostock im IGA Park Rostock die Abschlusspräsentation des BMWi-Förderprojekt GALILEOnautic statt.
Die RWTH Aachen, die Universität Bremen, die Universität Rostock, die Hochschule Wismar und das IT-Unternehmen SCISYS Deutschland GmbH entwickelten zusammen in einem vom Bundesministerium für Wirtschaft und Energie (BMWi) mit einem Fördervolumen von 1,6 Millionen Euro geförderten Projekt automatisierte Systeme für den maritimen Bereich.
Die Ergebnisse des Projektes wurden anhand eines realen Bewegungsszenarios autonom agierender Fahrzeuge im Umfeld des Rostocker Hafens demonstriert. Manuell gesteuerte Wasserfahrzeuge konnte hierbei erkannt und die Fahrtroute der autonom agierenden Fahrzeuge unter Beachtung der seemännischen Kollisionsverhütungsregeln angepasst werden.






Bildungsministerin informiert sich über das Projekt Netz-Stabil
Die Bildungsministerin von Mecklenburg Vorpommern, Birgit Hesse, hat am 23.03.2018 die Universität Rostock besucht und sich über das Verbundprojekt Netz-Stabil informiert. Nach einem Einführungsvortrag, in dem das Forschungskonsortium vorgestellt wurde, konnten Labore besichtigt und die Forschungsarbeit der einzelnen Arbeitsgruppen detaillierter vorgestellt werden.
Der Lehrstuhl Regelungstechnik untersucht im Projekt Probleme bei der Ankopplung von Windenergieanlagen an das bestehende Energienetz. Im Fokus dieser Untersuchungen steht die Stabilitätsüberprüfung der Einspeiseregelung.
Das Projekt ist Teil des Exzellenzforschungsprogramms des Landes Mecklenburg-Vorpommern und wird mit finanziellen Mitteln des Europäischen Sozialfonds (ESF) ermöglicht.

Besuch des Windkanals der TUHH im Rahmen des Projektreffens DP2
Am 21.03.2018 fand ein Projekttreffen im Rahmen des Forschungsprojekts DP2 statt, in welchem die Entwicklung eines automatischen Positioniersystems für Schiffe mit Voith-Schneider-Propellern untersucht wird.
Bei diesem Treffen konnten wir den Windkanal der Arbeitsgruppe Fluiddynamik und Schiffstheorie der TU Hamburg besichtigen, in dem im Rahmen des Projektes Untersuchungen zu Windlastverteilungen an Schiffsaufbauten durchgeführt werden. Die genauen Kenntnisse der daraus resultierenden Kräfte sind für die vom Lehrstuhl Regelungstechnik zu bearbeitende Adaption, Skalierung und Integration des DP-Regelsystems von Bedeutung.

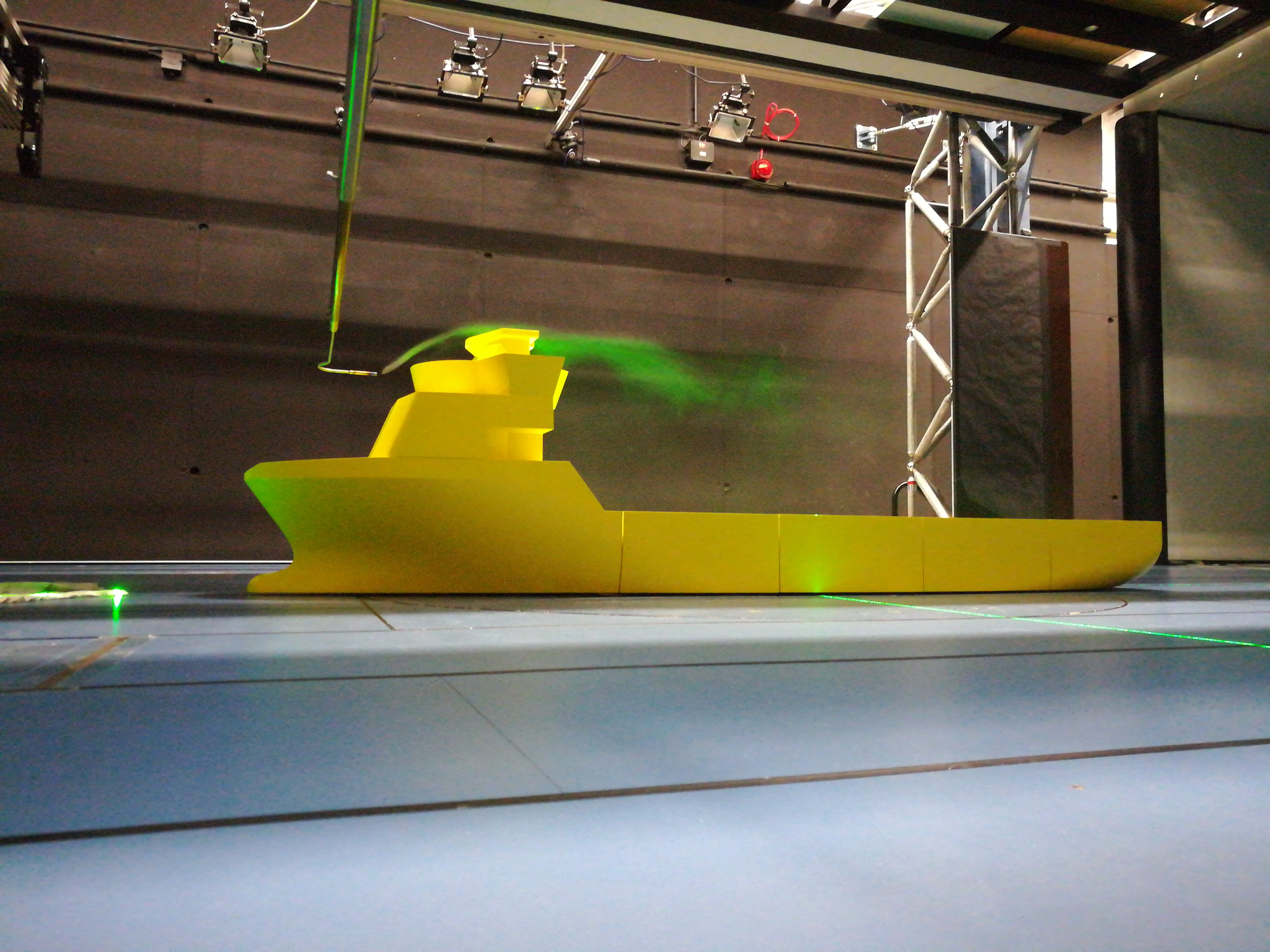
Dr. Torsten Schütt und Dr. János Zierath zu Gast am Lehrstuhl Regelungstechnik
Am 06.03.2018 konnte der Lehrstuhl Regelungstechnik Dr. Torsten Schütt und Dr. János Zierath von der W2E Wind to Energy GmbH aus Rostock begrüßen. Wind to Energy entwickelt und betreibt Windkraftanlagen unterschiedlicher Leistungsklassen für den weltweiten Markt. In einem spannenden Vortrag konnten sich das Team des Lehrstuhls und weitere Interessierte über die Arbeit und aktuelle Forschungsprojekte von Wind to Energy informieren. Schwerpunkte waren das dynamische Verhalten sowie die klassischen und modernen Regelungsmethoden für Windkraftanlagen. In der anschließenden Fragerunde und den Diskussionen in kleineren Gruppen zeigte sich das gegenseitige Interesse an der Forschungsarbeit.
Projekt Large Modifiable Underwater Mothership - Tauchversuche im Tiefwasserbecken
Im Rahmen des aktuell laufenden Projekts MUM - Large Modifiable Underwater Mothership und im Zusammenhang mit einer studentischen Arbeit wurden im Zeitraum von 11.- 13. Dezember 2017 Tauchversuche im Tiefwasserbecken der TU Berlin durchgeführt. Ziel dieser Versuche war es, Messdaten für das Bewegungsverhalten eines Unterwasserfahrzeuges bei Tauchgängen zu sammeln. Mit diesen Messdaten sollen im Folgenden die Parameter eines Bewegungsmodells des verwendeten Fahrzeugs identifiziert und ein entsprechender Tiefenregler entwickelt werden. Als Versuchsfahrzeug wurde für diese Messungen ein BlueROV2, ein kabelgeführtes Unterwasserfahrzeug, eingesetzt. Wir danken der TU Berlin, insbesondere Dipl.-Ing. Sebastian Ritz und Dipl.-Ing. Matthias Golz, für die Möglichkeit die Messungen in den Räumlichkeiten der Universität durchzuführen und für die Unterstützung während der Versuche.
Nachruf Prof. Dr.-Ing. Bernhard Lampe

Am 11. August 2017 ist unser lieber Kollege und Freund
Prof. Dr. rer. nat. Dr.-Ing. habil. Dr. h. c. Bernhard Lampe
verstorben.
Mit ihm verlieren wir einen herausragenden Wissenschaftler, geachteten Hochschullehrer und sympathischen Menschen. Seine Arbeit an der Fakultät für Informatik und Elektrotechnik zeichnete sich durch seine hohen Ansprüche an Forschung und Lehre aus, die er als Mathematiker und Regelungstechniker stets überragend erfüllte.
Auch in seinem Ruhestand war er weiter als Seniorprofessor an der Fakultät tätig, leitete bedeutende Forschungsprojekte und verfasste Bücher. Seine wissenschaftlichen Leistungen wurden unter anderem mit dem Titel Dr. h. c. der Meerestechnischen Universität St. Petersburg gewürdigt. Als Professor, Dekan und Prorektor der Universität war ihm die Entwicklung des Lehrstuhls Regelungstechnik, der Fakultät und der Universität stets eine wichtiges Anliegen.
Die Mitarbeiterinnen und Mitarbeiter des Instituts für Automatisierungstechnik werden ihn als begeisterten Wissenschaftler, freundlichen Kollegen und guten Freund in Erinnerung behalten.
Obituary: in memory of
Prof. Dr. rer. nat. Dr.-Ing. habil. Dr. h. c. Bernhard Lampe
On 11 August 2017 we have lost a great friend and colleague Prof. Bernhard Lampe. With his death we lost an outstanding scientist, a passionate teacher and a friendly human being. His work at Faculty of Computer Science and Electrical Engineering was distinguished by his high standards on both research and teaching, which he accomplished as a mathematician and a control engineer. His contributions continued through conducting significant research projects and authoring several books after retirement. His scientific achievements were acknowledged, among the others, with honorary doctorate degree from the State University of Ocean Technology of Saint Petersburg, Russia. His colleagues in the Institute of Automation at University of Rostock will remember Prof. Bernhard Lampe as an enthusiastic scientist, a friendly colleague and a remarkable friend.
GALILEOnautic - Projektreffen im Anwendungszentrum Regelungstechnik
Im Projekt GALILEOnautic dreht sich alles um die autonome Navigation von Schiffen in sicherheitskritischen Bereichen wie z.B. in Häfen. Am 22.03.2017 fand ein Projektreffen im Anwendungzentrum Regelungstechnik der Universität Rostock statt, bei dem die Projektpartner ihren aktuellen Stand der Arbeiten präsentierten und die Möglichkeit hatten, die autonom agierenden Fahrzeuge, welche der Lehrstuhl Regelungstechnik ausrüstet, zu inspizieren.
Keine Bilder gefunden.
AFluCoMIS - Kick-Off-Meeting

Am 21.02.2017 erfolgte das Kick-Off-Meeting für das Verbundprojekt AFluCoMIS, zu dem sich die Projektpartner der World of Medicine GmbH, des Krankenhaus Märkisch-Oderland GmbH und der Universität Rostock mit Vertretern des VDI in Berlin trafen. Auf dem Bild Anwesende von links nach rechts: Thomas Wustrack (Krankenhaus Märkisch-Oderland), Peter Westerhoff (W.O.M. GmbH), Alexander Benkmann und Eike Smolinski (Universität Rostock)
DP-II – Ein automatisches Positioniersystem für Schiffe mit Voith-Schneider-Propeller

In maritimen Anwendungen dienen Systeme zur Dynamischen Positionierung (DP) dem Halten der Position und des Kurses eines Schiffes durch alleinige Nutzung der Antriebsmodule trotz Einwirkung von Wind, Wellen und Strömung. Derartige Regelsysteme sind für eine Vielzahl von Anwendungen notwendig, so beispielsweise für Offshore-Versorgungsschiffe, Bohrschiffe, Kabelleger usw. Ein effizientes Antriebssystem für DP-Systeme ist der Voith-Schneider-Propeller, der sich konstruktionsbedingt insbesondere durch schnelle und präzise Schuberzeugung auszeichnet.
In Zusammenarbeit mit dem Unternehmen Voith Turbo GmbH & Co. KG, der Schiffbau-Versuchsanstalt Potsdam GmbH und der Technischen Universität Hamburg-Harburg wird in dem Verbundvorhaben DP-II an Methoden geforscht, die positiven Eigenschaften des Voith-Schneider-Propellers in DP-System besser auszunutzen und die Positioniergenauigkeit zu steigern. In dem Teilprojekt DP2go widmet sich das Institut für Automatisierungstechnik der Fakultät für Informatik und Elektrotechnik dem simulationsbasierten Entwurf und der Integration von DP-Regelsystemen. In Versuchen an Modellen und einem realen Schiff soll die Funktionsfähigkeit des DP-Systems aufgezeigt werden.
Das Verbundvorhaben wird von 02/2017 an für 3 Jahre vom Bundesministerium für Wirtschaft und Energie gefördert.
AFluCoMIS - Ein Assistenzsystem für die minimalinvasive Chirurgie
Die minimalinvasive Chirurgie ist eine Operationstechnik, die den Zugang zum Patienten über kleinste Wundschnitte erreicht. Vorteile für die Patienten sind eine Reduktion der Komplikationen wie Traumata, Narbenbildung, Infektionen und eine Verkürzung der Rekonvaleszenz. Die minimalinvasive Chirurgie ersetzt zunehmend klassische Operationstechniken.
Aktuell nutzen Therapiegeräte verfügbare Information nur unzureichend, da bei der Geräteentwicklung eine Vernetzung bisher wenig Beachtung findet.
Im Verbund mit der Firma World of Medicine GmbH und dem Klinikum Märkisch-Oderland forscht der Lehrstuhl für Regelungstechnik im Projekt AFluCoMIS an Methoden, um die minimalinvasive Chirurgie besser auf den individuellen Patienten anzupassen. Dafür soll ein Expertensystem entwickelt werden, welches dem Chirurgen während eines Eingriffs assistiert und gleichzeitig das medizinische Personal entlastet. Die Erfahrungen aus dem Operationsverlauf werden extrahiert und in einer Erfahrungsdatenbank gesichert und stehen damit für zukünftige Eingriffe zur Verfügung.
Die Ergebnisse des Verbundvorhabens AFluCoMIS, gefördert durch das Bundesministerium für Bildung und Forschung, werden direkt in die Entwicklung eines vernetzten Gerätesystems für die minimalinvasive Chirurgie einfließen und damit einen signifikanten Beitrag zur Verbesserung der Patiententherapie leisten.
Exkursion zur Versuchsstation Born
Am 09.01.2017 wurde die alljährliche Exkursion zur Versuchsstation Born der Landesforschungsanstalt für Landwirtschaft und Fischerei durchgeführt. Studenten der Aquakultur konnten im Rahmen der Vorlesung Kontrollsysteme / Automation einen Einblick in die Abläufe und die eingesetzten technischen Systeme bei der Zucht verschiedener Fischarten erlangen. Die Versuchsanstalt führt Untersuchungen zur Gestaltung einer ökologisch verträglichen und wettbewerbsfähigen Aquakultur im Land Mecklenburg Vorpommern durch.


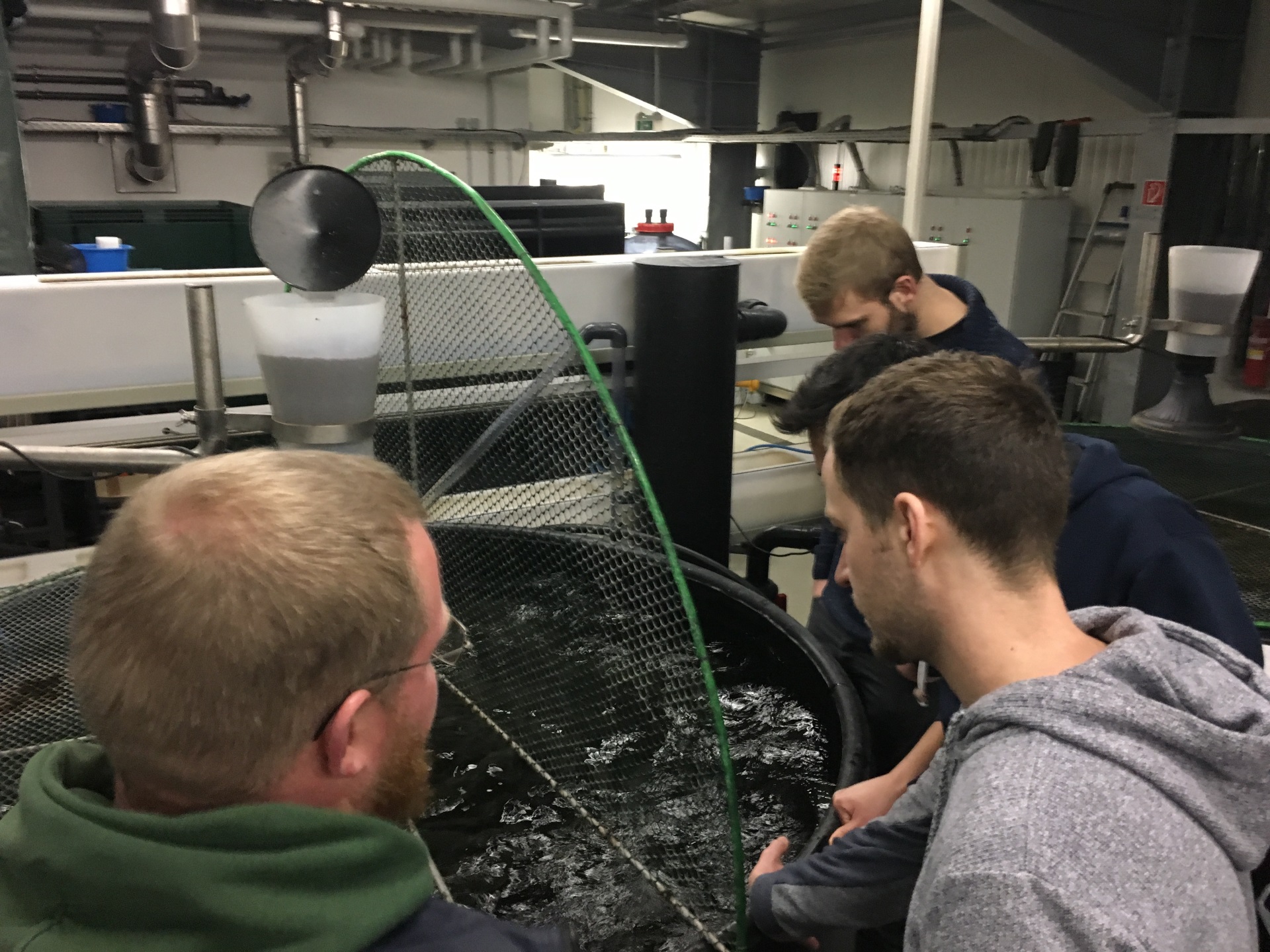
OpenAZR - Vorstellung der wissenschaftlichen Arbeit des Instituts
Am 19.12.2016 hatten alle interessierten Studenten die Möglichkeit, sich bei Stollen und Glühwein über die laufenden und abgeschlossenen wissenschaftlichen Projekte des Lehrstuhls Regelungstechnik zu informieren. Die Mitarbeiter hatten viele der Versuchsfahrzeuge und Versuchstände in Betrieb genommen, um die praktischen Seiten der Regelungstechnik erlebbar zu demonstrieren und zu zeigen, wie sich die theoretischen Arbeiten in der praktischen Umsetzung manifestieren. Nachfolgende Bilder zeigen einige Impressionen dieses Nachmittages.





GALILEOnautic - autonome Navigation von Schiffen in sicherheitskritischen Bereichen
Autonome Systeme sind das Zukunftsthema im Bereich der weltweiten Mobilität. Sie arbeiten komplett selbstständig, sind befähigt Entscheidungen eigenständig zu fällen und Aufgaben zu lösen – alles ohne menschliche Unterstützung. Am Lehrstuhl Regelungstechnik und im Anwendungszentrum Regelungstechnik des Instituts für Automatisierungstechnik der Uni Rostock werden derzeit Methoden entwickelt, um Schiffe in sicherheitskritischen Bereichen autonom navigieren zu können. Im Rahmen eines Verbundvorhabens wird die Forschung der Rostocker Wissenschaftler nun vom Bundesministerium für Wirtschaft und Energie (BMWi) mit einem Volumen von rund 440.000 Euro gefördert. Das Projekt mit dem Namen GALILEOnautic startet ab Juli 2016 und wird zunächst bis Mitte 2018 unterstützt.
Keine Bilder gefunden.
Gäste von der University of Zagreb im Rahmen der Universitätspartnerschaften an der Universität Rostock zu Gast
Während Ihres mehrtägigen Aufenthaltes an der Universität Rostock präsentierten Prof. Markovic und Prof. Miskovic von der University of Zagreb am 21.11.2016 im Rahmen des regelungstechnischen Kolloquiums aktuelle Projekte und Forschungsergebnisse.

Laboratory for Autonomous Systems and Mobile Robotics at UNIZG-FER (by Asst. Prof. Ivan Markovic)
In this talk we will present research activities carried out within the Laboratory for Autonomous Systems and Mobile Robotics (LAMOR, http://lamor.fer.hr) of University of Zagreb Faculty of Electrical Engineering and Computing. LAMOR is directed by Prof. Ivan Petrović and has a long tradition in research of advanced control strategies and estimation techniques for a variety of applications with a strong emphasis on autonomous navigation of ground and aerial robots in unknown and dynamic environments. Our methodology relies on a strong coupling between theoretical research, algorithm development, experimental evaluations, and a healthy dose of serendipity. LAMOR's research activity is organized around three major axes that will be covered in the talk: Motion Planning and Control, Simultaneous Localization and Mapping, and Detection and Tracking of Moving Object. Looking forward to seeing you at the talk.

Laboratory for Underwater Systems and Technologies at UNIZG-FER (by Assoc. Prof. Nikola Miskovic)
LABUST (http://labust.fer.hr) research group holds expertise in marine robotics: development and adaptation of marine vehicles (3 AUVs, 1 ASV); acoustic networks and sonars; identification, navigation, guidance and control of marine vessels; cooperative and coordinated formations of marine vehicles. LABUST is currently coordinating one FP7 project (CADDY - Cognitive Autonomous Diving Buddy), one H2020 project (EXCELLABUST - Excelling LABUST in Marine Robotics) and is partner in a number of research projects. This talk will focus on the accomplishments of the most recent projects conducted within the laboratory. Special focus will be placed on CADDY project where significant advances in the human-robot interaction in the underwater environment have been accomplished.
Breaking the Surface 2016 in Kroatien
In diesem Jahr fand vom 02. bis zum 09. Oktober zum achten Mal der internationale Workshop „Breaking the Surface“ in Biograd na Moru, Kroatien, statt. Diese Veranstaltung dient Experten und Studenten aus den Fachgebieten der maritimen Robotik, der Meeresbiologie, Meeresarchäologie und der maritimen Sicherheit als Plattform zum interdisziplinären Austausch von Ideen und Expertisen, sowie zur Vorführung und Erprobung von neuen Technologien im Bereich der Unterwasserrobotik und -kommunikation. Das IAT war durch Wolfgang Drewelow, Erik Rentzow und Thilo Müller vertreten.



10. IFAC Konferenz Control Applications in Marine Systems (CAMS) in Trondheim

Die 10. IFAC Konferenz Control Applications in Marine Systems (CAMS) fand vom 13.-16. September 2016 in Trondheim/ Norwegen statt. Unter der Organisation der NTNU trafen sich die führenden Wissenschaftler aus aller Welt, um die aktuelle Forschung im Bereich der maritimen Automation vorzustellen. Zu den Schwerpunkten zählten insbesondere das Handling von Unterwasserfahrzeugen oder Kollisionsverhütung. Unser Institut war mit drei Mitarbeitern und einigen Beiträgen vertreten. Erik Rentzow berichtete mit dem Thema "Modelling and Control of ASV Acting As Communication Node for Deep-Sea Applications" zu den wissenschaftlichen Ergebnissen des SMIS-Projektes. In dem Vortrag "Roll Damping Using Voith Schneider Propeller: A Repetitive Control Approach" stellte Agnes Schubert einen neuartige Erweiterung der Reglerstruktur einer Rolldämpfung mit einem Repetitiv-Control-Plugin vor, welches im Projekt DPMotion entwickelt wurde.
Dr. Vladimir Djapic zu Gast am Lehrstuhl Regelungstechnik
Am 24.06.2016 konnte der Lehrstuhl Regelungstechnik Dr. Vladimir Djapic vom Unmanned Maritime Vehicle Laboratory (UMV LAB) des SPAWAR System Center – Pacific in San Diego begrüßen. Neben einer Besichtigung des Anwendungszentrums Regelungstechnik fand ein gegenseitiger Austausch von Erfahrungen mit Unterwassertechnik und -fahrzeugen mit der maritimen Forschungsgruppe des Lehrstuhls statt. Am Nachmittag stellte Dr. Djapic aktuelle Forschungsthemen am UMV LAB vor. Den Abschluss bildete eine Führung im Marine Science Center in Hohe Düne.
SMIS-Projekterprobung am Bodensee
Zur finalen Erprobung der kooperativen Fähigkeiten des im Projekt SMIS entwickelten Fahrzeugverbundes wurde der tiefste See Deutschlands auserkoren. In Güttingen auf der Schweizer Seite des Bodensees trafen sich die Entwickler vom 09.05.-20.05.2016 zu gemeinsamen Versuchen mit einem Unterwasserfahrzeug (AUV), der Unterwasser-Bodenstation (SBS) und dem autonomen Oberflächenfahrzeug (USV) sowie zur Demonstration der Projektergebnisse vor den Mittelgebern.
Der Lehrstuhl Regelungstechnik der Universität Rostock von Prof. Jeinsch war mit den drei Mitarbeitern D. Dewitz, E. Rentzow und M. Kurowski vertreten. Die Experimente umfassten die akustische Netzwerkkommunikation und gegenseitige Lokalisierung zwischen den Fahrzeugen, das Einmessen der am Seeboden verankerten SBS durch das USV und die Verfolgung des missionsdurchführenden AUV durch das USV als sogenanntes „acoustic following“.
Im Folgenden zeigt das Video einige Eindrücke von der Erprobung. Mehr Bilder und ausführliche Informationen zum Projekt gibt es auf der Projektwebseite: www.smis-monitoring.de.

Bitte beachten Sie: Sobald Sie sich das Video ansehen, werden Informationen darüber an Youtube/Google übermittelt. Weitere Informationen dazu finden Sie unter Google Privacy.
Besichtigung und Vorstellung der Arbeit des DLR in Neustrelitz
Am 18.05.2016 hatten Studenten des Lehrstuhls Regelungstechnik die Möglichkeit das Deutsches Zentrum für Luft- und Raumfahrt in Neustrelitz zu besichtigen. In einem Vortragsprogramm wurden außerdem die aktuellen Arbeiten und Themengebiete im Bereich der satellitengestützte Erdbeobachtung und Navigation sowie der nautischen Systeme vorgestellt.
SMIS-Projekterprobung am Bodensee
Das Projekt SMIS führt im Zeitraum vom 09.05.2016 bis zum 20.05.2016 Tests an Deutschlands größtem See, dem Bodensee, durch. Die Demonstrationen werden ausgehend vom kleinen Schweizer Ort Güttingen stattfinden.
Die Tests werden erstmals alle drei im Projekt entwickelten Fahrzeugtypen umfassen, also ein Oberflächenfahrzeug (USV), ein Missions-U-Boot (AUV) und eine Bodenstation (SBS).
Die Projektzusammenfassung und die ‚Vision‘ ist der Projektwebseite zu entnehmen: www.smis-monitoring.de .



Bodeneffektfahrzeug und Simulator auf dem Hochschulinformationstag 2016
Am 30.04.2016 fand der alljährliche Hochschulinformationstag der Uni Rostock statt, an dem sich Schülerinnen und Schüler über die Möglichkeiten des Studiums an unserer Uni informieren konnten. Der Fachbereich Regelungstechnik war dieses Jahr mit seinem Simulator eines Bodeneffektfahrzeuges und dem dazugehörigen Modell vertreten. Tobias Hahn und Thilo Müller erklärten wie ein Bodeneffektfahrzeug funktioniert und welche wissenschaftlichen Fragestellungen dazu an unserem Institut erforscht werden.
Vermessung der Antriebe des Allokationsmodells in der Längsschlepprinne des LSM/ Uni Rostock

Am 08.02.2016 wurden im Rahmen einer studentischen Arbeit die Antriebskennlinien eines Modellschiffes in der Schlepprinne des Lehrstuhls für Strömungsmechanik an der Universität Rostock ermittelt. Hierfür wurden bei bestimmten Antriebseinstellungen die resultierenden Kräfte und Momente am Schiff gemessen, woraus sich der Schub der einzelnen Propeller berechnen lässt. Diese Antriebsmodelle sollen nun genutzt werden, um Allokationsalgorithmen, d.h. die Aufteilung von Gesamtkräften auf die einzelnen Antriebe, im Modellmaßstab zu erproben.
Wir danken dem Lehrstuhl um Prof. Sven Grundmann, insbesondere jedoch Dr. Andreas Wolter und Armin Kurz, für die Möglichkeit der Messungen und die Unterstützung während der Versuche.
Erprobung des SMIS-Oberflächenfahrzeuges im Rostocker Hafen
Am 9. Dezember 2015 fand der erste Freifahrtversuch zur Ermittlung des dynamischen Bewegungsverhaltens des im Projekt SMIS entwickelten Oberflächenfahrzeugs im Rostocker Hafen statt. Für die logistische Unterstützung bedanken wir uns bei der AFZ Aus- und Fortbildungszentrum Rostock Gmbh.
Trimmen des SMIS-Oberflächenfahrzeuges im AZR
Im November 2015 wurde das neue, im Projekt SMIS gebaute Oberflächenfahrzeug im AZR mit der entwickelten Mess-, Antriebs- und Regelungstechnik ausgestattet und danach im Pool getrimmt. Für die logistische Unterstützung bedanken wir uns bei MeckRohr GmbH.
Dynamisches Positionieren mit dem Modellschiff Edda Fram
Im Rahmen des Projekts DPMotion wurden Mitte November 2015 an der SVA Potsdam Versuche zur Dynamischen Positionierung des Modellschiffs Edda Fram durchgeführt. Neben Standardversuchen in Glattwasser, wie z.B. Kursänderung oder Positionsversatz, wurde das Schiff auch in Wellen und Strömung an Position gehalten. Dem Schiff standen dabei nur 2 Voith-Schneider-Propeller und ein Bugstrahlruder zur Verfügung.
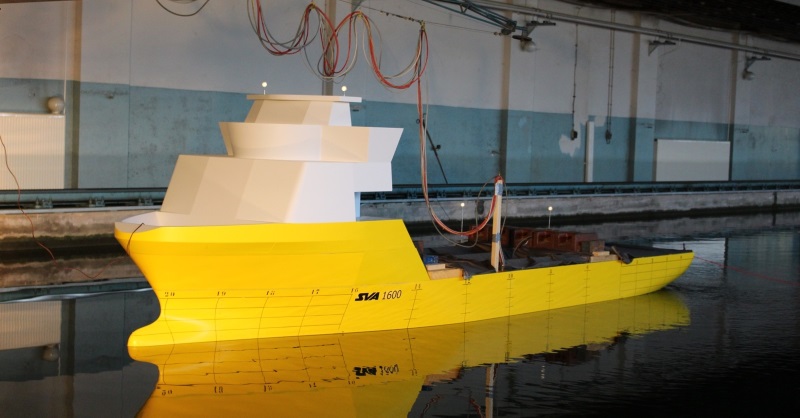
Projekttreffen DPMotion in Heidenheim

Im Rahmen des Forschungsprojektes DPMotion fand vom 20.-21. Oktober 2015 ein Treffen mit den Projektpartnern in Heidenheim statt, wobei der Gastgeber VOITH ein Meeting in der Voith-Arena organisierte. Schwerpunkt des Projektes ist die Dynamische Positionierung von Schiffen mit Voith Schneider Propeller. Neben dem Industriepartner Voith und dem Lehrstuhl für Regelungstechnik wirken ebenfalls die Schiffsbauversuchsanstalt Potsdam und die Technische Universität Hamburg-Harburg mit. Im Anschluss an die Besprechung zum aktuellen Projektstand war eine Führung durch die Katakomben des Stadions möglich, wodurch wir interesssantes Hintergrundwissen zum Verein bekommen haben.
Breaking the Surface 2015 in Kroatien
Vom 4.10. bis 11.10.2015 fand zum siebenten Mal der interdisziplinäre Workshop für Unterwasserrobotik „Breaking the Surface“ in Biograd na Moru, Kroatien statt. Bei dieser Veranstaltung kommen Experten und Studenten aus den Fachgebieten maritime Robotik, Meeresbiologie, Archäologie, Ozeanographie und maritime Sicherheit zusammen. Das IAT war durch Torsten Jeinsch, Wolfgang Drewelow und Erik Rentzow vertreten.



Überführung des neuen USVs ins Institut für Automatisierungstechnik
Der Bau des im Projekt SMIS entwickelten USV (Unmanned Surface Vehicle) wurde von der REAN Werft fertiggestellt. Am 12.10.2015 wurde das Fahrzeug aus Sassnitz/ Mukran abgeholt. Nächster Schritt ist die elektrische Ausrüstung bevor die Jungfernfahrt im Rostocker Hafen erfolgt.

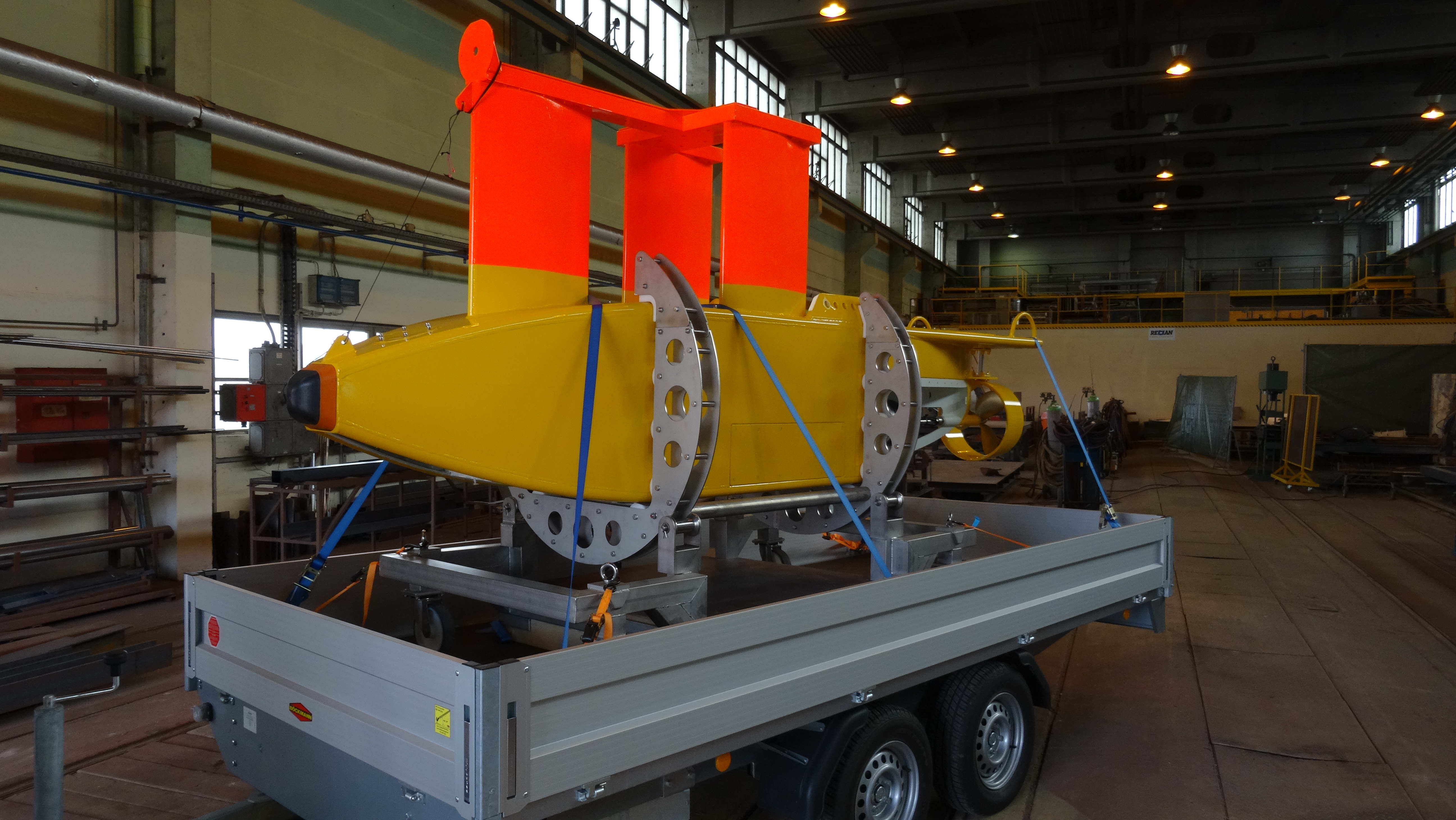

Erprobung des AUVs Doris Alpha im Gotlandbecken
Im Rahmen des Projektes SMIS erfolgte vom 24.09.-30.09.2015 die Erprobung des AUV (Autonomous Underwater Vehicle) Doris Alpha mit dem Forschungsschiff EMB. Ziel war die Einstellung verschiedener Regler zur Absolvierung von Tauchfahrten im Gotlandbecken, südlich von Schweden. Vom IAT war Erik Rentzow mit an Bord. Außerdem stellte das IAT das kleine ROV Videoray für Unterwasseraufnahmen zur Verfügung. Diesmal war auch ein Filmteam des NDR dabei. Link zum Beitrag
Video "Tauchgang: Forschungsfahrt in der Ostsee" Nordmagazin vom 12.10.2015
Keine Bilder gefunden.
64. Deutscher Luft- und Raumfahrtkongress (DLRK) in Rostock

Von 22. bis 24. September 2015 fand in Rostock der 64. Deutsche Luft- und Raumfahrtkongress (DLRK) statt, welcher von der Deutschen Gesellschaft für Luft- und Raumfahrt (DGLR) veranstaltet wird. Der Lehrstuhl für Regelungstechnik war am Messestand der Uni-Rostock mit seinem Bodeneffektfahrzeug vertreten, welches auf großes Interesse bei den Besuchern, unter ihnen der Rostocker Oberbürgermeister Roland Methling und den Konferenzteilnehmern stieß.
Im Rahmen des Kongresses stellte Tobias Hahn mit seinem Beitrag "Control of Wing-In-Ground Effect Craft with Respect to Unsteady Flow Effects" die neusten Forschungsergebnisse auf dem Gebiet der Regelung von Bodeneffektfahrzeugen vor.
9th IFAC Symposium SAFEPROCESS 2015 an der Pariser Elitehochschule Arts et Métiers ParisTech
Am 02.09. - 04.09.2015 fand in Paris das 9th IFAC Symposium on Fault Detection, Supervision and Safety of Technical Processes (SAFEPROCESS 2015) an der Arts et Métiers ParisTech statt. In der Regular Session Data Driven FDI stellte mit Adel Haghani auch ein Mitarbeiter der Lehrstuhls Regelungstechnik seine neusten Forschungsergebnisse zur Fehlererkennung an Windkraftanlagen unter dem Titel "Data-Driven Multimode Fault Detection for Wind Energy Conversion Systems" vor.

10. IFAC Conference on Manoevering and Control of Marine Craft (MCMC'2015) an der DTU in Kopenhagen
Vom 24.08.-26.08.2015 fand die 10. IFAC Conference on Manoevering and Control of Marine Craft (MCMC'2015) an der DTU in Kopenhagen, Dänemark statt. Mit ungefähr 100 Teilnehmern, 48 eingereichten Publikationen und mehreren Plenar- und Industrievorträgen wurden Forschungsaspekte und Ergebnisse aus aktuellen Themen wie Unterwasserrobotik, Autonomie auf See, Umweltschutz in der Seefahrt und Dynamische Positionierung vorgestellt.
Der Lehrstuhl Regelungstechnik der Universität Rostock war durch Bernhard Lampe, Erik Rentzow und Philipp Koschorrek vertreten. Dabei wurden zwei Arbeiten aus den aktuellen Forschungsprojekten SMIS und DPMotion vorgestellt:
- Temperature Gradient Following Method for Box-Shaped AUV (Erik Rentzow)
- Dynamic Positioning with Active Roll Reduction Using Voith Schneider Propeller (Philipp Koschorrek)


Suche von Unterwasser-Erprobungsgebieten für das Projekt SMIS im Senftenberger See

Eine Aufgabe im Projekt SMIS (Subsea Monitoring via Intelligent Swarms) ist es, eine stationäre Unterwasserbasis automatisch im Pazifikboden auf 6000m Wassertiefe zu verankern. Damit dabei alles funktioniert, müssen die Funktionen vorab getestet werden. Zu diesem Zweck wurden Anfang August Suchfahrten mit unserem ROV im Senftenberger See durchgeführt, um die dortige Bodenbeschaffenheit auf ihre Eignung für Tests des Verankerungsmechanismus zu untersuchen.
Europäischer Workshop "Cyber-physical systems and systems of systems"

Am 03. Juli 2015 trafen sich Wissenschaftler der Technical University of Denmark, der University of Limerick, der University of Zagreb, der Norwegian University of Science and Technology, der Linköping University und der Universität Rostock im Anwendungszentrum Regelungstechnik zu einem gemeinsamen Workshop mit der Thematik "Cyber-physical systems and systems of systems".
von links nach rechts: Per Dalgas Jakobsen, David Johan Christensen, Technical, University of Denmark, Philipp Koschorrek, University of Rostock, Mogens Blanke, Technical University of Denmark, Edin Omeric, University of Limerick, Zoran Vukic, University of Zagreb, Daniel Toal, University of Limerick, Martin Ludvigsen, Norwegian University of Science and Technology, Torsten Jeinsch, University of Rostock, Adel Haghani, University of Rostock, Martin Kurowski, University of Rostock, not in the picture Michael Felsberg, Linköping University
12th IFAC Workshop on Time Delay Systems in Ann Arbor, Michigan, USA
Vom 28.-30.06.2015 fand in Ann Arbor, Michigan, USA der 12. IFAC Workshop "Time Delay Systems" statt. Vom Lehrstuhl Regelungstechnik waren Prof. Lampe mit dem Thema "Parametric Transfer Matrices for Sampled-Data Systems with Linear Periodic Continuous Process and Input Delay" und Rudy Cepeda-Gomez mit dem Thema "Special Cases in Using the Matrix Lambert W Function for the Stability Analysis of High-Order Linear Systems with Time Delay" vertreten.


Besichtigung eines Hardware-in-the-Loop-Prüfstands bei VW in Wolfsburg

Am 23.06.2015 hatte die Forschungsgruppe "Automotiv" des Lehrstuhls Regelungstechnik die Gelegenheit einen HIL-Prüfstand (Hardware in the Loop) bei Volkswagen in Wolfsburg in Aktion zu erleben. Auf solchen Prüfständen werden aktive Baugruppen eines Fahrzeuges miteinander vernetzt aufgebaut, um diese unter definierten Versuchsbedingungen zu testen und auf ein korrektes Zusammenspiel der Komponenten zu untersuchen. Auf dem besichtigten Prüfstand wird aktuell der e-Golf PluginHybrid getestet.
Workshop der ASIM/GI-Fachgruppen 2015 in Stralsund

Vom 18. bis 19. Juni fand an der Fachhochschule in Stralsund ein Workshop der ASIM/GI Fachgruppen statt. Neben spannenden Vorträgen von verschiedenen Hochschulen und Instituten aus Deutschland und Österreich fanden weitere Diskussionen mit den Teilnehmern statt. Die Vortragsthemen des Fachbereiches Regelungstechnik der Universität Rostock waren:
- Robuste Regelung zur Dynamischen Positionierung von Schiffen mit Voith Schneider Propellern (Charlotte Siebert)
- Zur Strukur von dynamischen Modellen für die Regelung von MIMO Prozesse (Bernhard Lampe)
- Towards a Newer Toolbox for Computer Aided, Polynomial Design of Sampled-Data Systems (Rudy Cepeda Gomez)
- Ein Ansatz zur datenbasierten Reglerparametrierung (Alexander Schöley)
Vorführung eines ROVs "Predator II" beim Hersteller Seatronics
Am 10.06.2015 fand im Rahmen aktueller Forschungsvorhaben die Besichtigung und Vorführung eines ROVs (Remotely operated vehicle) "Predator II" bei der Firma Seatronics in Kiel statt.
Atlantik-Erprobungsfahrt im Projekt SMIS
Vom 10.05.-02.06.2015 fand im Rahmen des Projektes SMIS eine Erprobungsfahrt mit dem Forschungsschiff "Poseidon" im Antlantik (Azoren) statt. Ziel war die Erprobung der Tiefen- und Temperaturgradientenregelung des AUV (Autonomous underwater vehicle) "DORIS alpha".



Exkursion zur IAV nach Gifhorn

Am 08.06.2015 fand im Rahmen der Zusammenarbeit der IAV GmbH und des Lehrstuhls Regelungstechnik der Uni Rostock eine Exkursion mit interessierten Studenten zur IAV nach Gifhorn statt. Hier konnten die Studenten den praktischen Einsatz von Regelungstechnik in der Fahrzeugentwicklung erleben sowie Motor- und Hydraulikprüfstände besichtigen, auf denen die Entwicklung dieser Technik durchgeführt und getestet wird. Ein weiteres Highlight der Exkursion war die Vorführung des Prototypen eines Roboters zur Unterstützung älterer Menschen beim Transport von schweren Einkäufen vom Supermarkt bis in die Wohnung auch über Treppen hinweg.
International IEEE Conference Oceans'15 in Genua
Vom 18. bis 21. Mai 2015 fand in Genua/Italien unter dem Motto "Discovering substainable ocean energy for a new world" die internationale IEEE-Konferenz Oceans' 2015 statt. Für die maritime Arbeitsgruppe am Lehrstuhl Regelungstechnik stellte Martin Kurowski mit seinem Beitrag "Design and automation of an ocean-going autonomously acting USV" das im Projekt SMIS entwicklete autonome und hochseetaugliche Oberflächenfahrzeug vor. Das Fahrzeug wurde als Kommunikationsknoten zur Koordination eines Swarms von autonomen Tiefseefahrzeugen entwickelt und soll im Pazifik zur Exploration von Manganlagerstätten in 6000 Metern Tiefe eingesetzt werden.


Abschlusspräsentation im Verbundprojekt SaMariS

Am 26.05.2015 fand in Warnemünde die Abschlusspäsentation des Verbundprojektes "Satellitengestützte Maritime Sicherheit" (SaMariS) statt, welches von drei Gewinnern der Exellenzinitiative des Landes Mecklenburg-Vorpommern 2011 durchgeführt wurde. Im Teilprojekt des Lehrstuhls Regelungstechnik wurde auf der Basis eines komplexen neuen Dynamikmodells für das Bewegungsverhalten des Schiffes und einem Bahnregler ein innovatives Planungstool entwickelt. Das Tool ermöglicht eine effiziente Manöverplanung unter Vorgabe verschiedener Schiffsgeschwindigkeiten sowie das automatische Abfahren der geplanten Bahn.
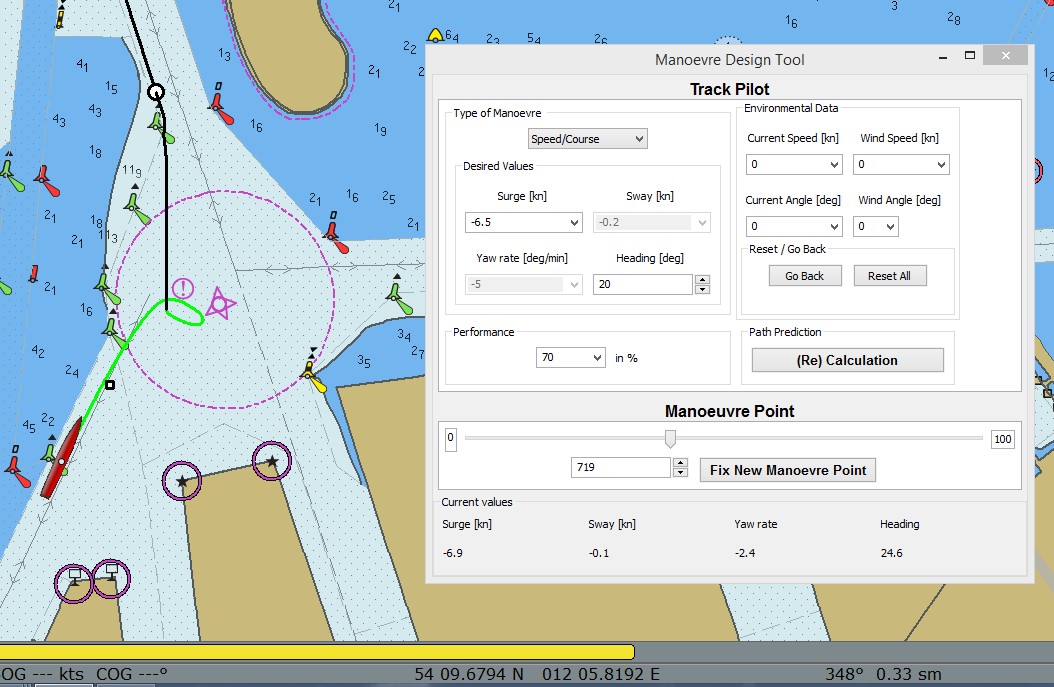

14th International Conference on Computer and IT Applications in the Maritime Industries (COMPIT 2015)

Vom 11. bis 13. Mai 2015 fand in Ulrichshusen die "14th International Conference on Computer and IT Applications in the Maritime Industries (COMPIT 2015)" statt. Für die maritime Arbeitsgruppe stellte Martin Kurowski die neusten Arbeiten am Lehrstuhl Regelungstechnik, insbesondere zur Kopplung und Kommunikation autonomer Über- und Unterwasserfahrzeuge vor.
Umbau des Motorenprüfstandes im Anwendungszentrum Regelungstechnik

Am 10.04.2015 wurde der Motorenprüfstand im Anwendungszentrum Regelungstechnik im Tannenweg umgebaut, um im Rahmen des Projektes "Datenbasierte Fehlererkennung und Fehlerdiagnose an Verbrennungsmotoren" Versuche durchführen zu können. Die Methoden der datenbasierten Fehlererkennung sollen eine schnelle Anpassung der Fehlerdiagnose, ohne aufwendiges Applizieren, an neu entwickelten Motoren ermöglichen.
Erprobung und Taufe des Versuchsfahrzeuges im Rahmen des Verbundprojektes SMIS

Am 01.04.2015 - 02.04.2015 wurde im Rahmen des Verbundprojektes SMIS (Subsea Monitoring via Intelligent Swarms) die Taufe und die ersten Versuche mit dem eigens für dieses Projekt konstruierten Oberflächenfahrzeug durchgeführt.
Ziel der Erprobung war die Messung des Widerstands- und Trimmverhaltens bei verschiedenen Fahrgeschwindigkeiten sowie die Ermittlung der Dämpfungseigenschaften der Roll- und Pitschbewegung.
Projekttreffen DPMotion am 10. März 2015 Potsdam
Erprobung im Rahmen des Verbundprojektes SMIS

Vom 04.12.2014 - 12.12.2014 wurde im Rahmen des Verbundprojektes SMIS (Subsea Monitoring via Intelligent Swarms) eine weitere Erprobung im Arbeitsgebiet Arkonasee und Gotlandbecken durchgeführt. Mit dabei auf dem FS Elisabeth Mann Borgese war vom Institut für Automatisierungstechnik M.Sc. Erik Rentzow.
Ziel der Erprobung war die Datenaufnahme mit dem AUV DORIS zur Modellgenerierung und dessen Bedatung.
Schiffsbesichtigung des Forschungsschiffneubaus "SONNE" am 24. November 2014
Schiffsbesichtigung des Forschungsschiffneubaus "SONNE" am Passagierkai in Warnemünde

Breaking the Surface serves as a meeting place of experts and students of marine control engineering and signal processing and the marine robotics application areas in various types of ocean science.
M.Sc. Erik Rentzow from Institute of Automation visited from 05.10.2014 to 12.10.2014 the world’s first successful, multi-year field training program that combines academic topics in marine robotics and robotics application areas and hands-on working experience in the sea, doing remote sensing and sampling for various ocean sciences.